- 前方および左右に超音波測距センサをそれぞれ各一個を有する。(合計3個)
- 前1個、左右に1個づつの赤外光検出センサを有する。(合計3個)
- 左右の側面、また後方にタッチセンサを各一個、前方にタッチセンサ機能をかねたスイッチ押下用バンパを有する。(合計6個)
プログラムは、C 言語でコーディングする。
- スタート位置前方にポストがあるかないかを確認。
-
ポストを前方に発見した時。(回避プログラム)
- 右に90°方向転換し、左の超音波センサで、ポストの無い位置まで前進。
- 左に90°方向転換。
- 左右に超音波を出しながら前進。
- ポスト感知後、停止。ポスト獲得モードへ移る。
- 右(左)にポストを発見した場合、右(左)に90°方向転換。
- 右(左)を超音波センサで探索しながら、ポストへ接近。
- ポストと一定距離(6.5cm)を保ちながら、周回運動を行う。その際、右(左)を赤外線センサで探索する。
- スイッチを赤外線センサで発見したら、停止。右(左)へ90°方向転換。
- タッチセンサが押され、赤外線を感知しなくなるまで前進。(スイッチを押す)
- 6.5cm後退
- 左(右)へ90°方向転換し、ポスト獲得モードに入った位置まで戻る。
- 以後、フィールド端まで探索モードを続ける。
- ポストがすべて獲得できなかった場合(獲得したポストの個数で判断する)、補助獲得モードへ移る。
- 壁と10cm離れた所をポストを探しながら移動。
- ポストを発見したら、ポスト獲得モードへ移る。
3 諸元
- 外観 図1に本システムの外観を示す。
- 機能性能
- 外形:縦横32[cm]×32[cm]以内に収まること。
- 走行性能
- 最高速度:1[m/sec]
- ライントレース精度:
- 1[m]の直線をトレースしたとき、移動中の左右のシフトが±10[cm]以内で、左右の方向のぶれが±10[度]以内であること。また、目的地点での停止位置が半径10[cm]以内の円内にあり、方向は±10[度]以内にあること。
- ライントレース精度:
- 超音波測距センサ性能
- 滑らかな平面および直径20cmの円筒側壁と正対した状態で
- 測定範囲:0.2[m]以上~1.0[m]以下
- 測定誤差:3[cm]以内
- 赤外光検出センサ性能
- 競技規定のポストが発光する赤外線の正面40cm以内に接近したときこの赤外線を検出できること。
- 側面ワイヤ型タッチセンサ
- ワイヤが取り付けられたマイクロスイッチの接点のON/OFFで接触を検出する。パーソナルコンピュータのキーボードを押下する程度の圧力で接触を感知できること。
- 前面バンパ型タッチセンサ
- バンパの形状は外形図を参照すること。バンパーはマシンに対して前後方向に移動可能とし、通常はばねにより前方に押し出されている。可動ストロークは1cm程度とする。バンパを押し込むのに必要な圧力は上記と同程度とする。
- マンマシンインタフェース
- 表示機能:
- 接続された LCD (20文字x2行)に、ソフトウェア制御による表示が可能なこと。
- 入力機能:
- PS/2 インターフェイスから接続された 10 キーからの入力により、ソフトウェアの複数の競技モードと試験モードの切り替え、およびシャットダウンが可能であること。
- 電源制御機能
制御回路用の電源とモータ駆動用の電源は完全に分離されていなければならない。電源は以下のスイッチによりコントロールされる。- メインスイッチ(ロック型):
- 制御回路系のモータ系すべての電源を投入/切断する。
- スタートスイッチ(ノンロック型):
- モータ系の電源を投入する。
- 強制停止スイッチ(ノンロック型):
- モータ系の電源を切断する。
- 電源
下記電池を制御回路用とモータ駆動用にそれぞれ1個づつ計2個使用する。- 公称電圧:7.2[V]
- 容量:1700[mAh]以上
- 種別:NiCd電池
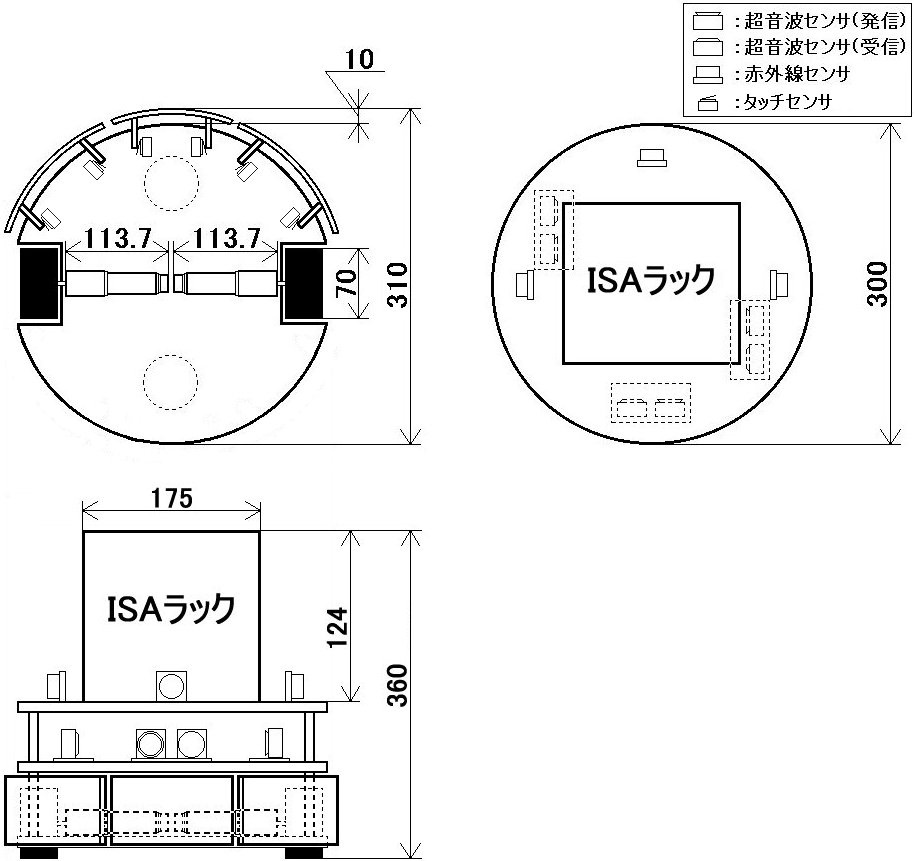
図1. MIRS004外観図
4 ハードウェア構成
- システム構成ツリー
下記にシステムの構成を示す。
- 設計は基本的にツリーの上位から行われ、組立は下位から行こなわれる。
- 組立の順が狂ってはならない。とくに前段階で組み立てたものをその上の段階に組み立てるときに分解等の作業があってはならない。
- 保守交換単位は一つの枝で構成されなければならない。また、保守交換単位の交換時に、交換作業が容易に行なえるような構造でなければならない。つまり、システムをバラバラにしなければ交換できないような構造にしてはならない。授業では保守部品まで作成しないが、製造不良による故障が多発するので修理作業が容易に行える構造になるように心がける。
- 電子回路も機構もソフトもこのツリーに包含されていなければならない。
- 試験検査仕様書や取扱説明書をも含んでいなければならない。
システム構成ツリー
下記にシステムの構成を示す。MIRS0004製造仕様書 |- MIRS0004組立図 |- ソフトウェア | |- シャーシフレーム組立図 | |- MIRS0004.X(プログラムファイル) | | |- シャーシフレーム | | |- RT-Linux ver2.3 | | |- モータx2 | | |- カーネルパッチ | | |- モータ取付金具x2 | | |- ユーザ・モード・ファイル | | |- 可逆モータパワー変換ボード | | | |- 高レベルモード | | |- シャーシフレーム部ケーブル接続図 | | | | |- MODE01 ポスト探索モード | | | |- コネクタ類 | | | | |- MODE02 回避モード | | | |- ケーブル類 | | | | |- MODE03 獲得モード | | | |- ケーブル検査仕様書 | | | | |- MODE04 補助探索モード | | |- 側面バンパ型タッチセンサ(左) | | | | |- MODE05 ポスト探索モード | | | |- タッチセンサ | | | | |- MODE06 自己位置修正モード | | | |- バンパ機構 | | | |- ユーザ・モード・ファイル仕様書 | | | |- ネジ類 | | |- 実行形式ファイル作成マニュアル | | |- 側面バンパ型タッチセンサ(右) |- MIRS0004試験仕様書 | | | |- タッチセンサ |- MIRS0004取扱説明書 | | | |- バンパ機構 |- 電池 | | | |- ネジ類 | | |- 前面バンパ型タッチセンサx6 | | | |- タッチセンサx6 | | | |- バンパ機構 | | | |- ネジ類 | | |- タイヤx2 | | |- ネジ類 | | |- シャーシフレーム試験仕様書 | |- 電子回路フレーム組立図 | | |- 電子回路フレーム | | |- ラック | | | |- ISAラック | | | |- CPUボード(VSBC1) | | | |- IOボードアセンブリ | | | | |- IOボード(VIPC310) | | | | |- IPDigital48ボード | | | | |- ロータリエンコーダボード | | | | |- ジャンパ設定仕様書 | | | |- ドータボード | | | |- FPGAボード | | | |- マンマシンインターフェースボード | | | |- VMEラックジャンパ設定仕様書 | | |- 電源ボード | | |- 左超音波センサ | | |- 右超音波センサ | | |- 前超音波センサ | | |- 赤外線センサx3 | | |- 電子回路フレーム部ケーブル接続図 | | | |- コネクタ類 | | | |- ケーブル類 | | | |- ケーブル検査仕様書 | | |- 取付金具 | | |- ネジ類 | |- ケーブル接続図 | |- 電池ホルダ | |- 取付金具 | |- ネジ類 - エレクトロニクス回路構成/機能
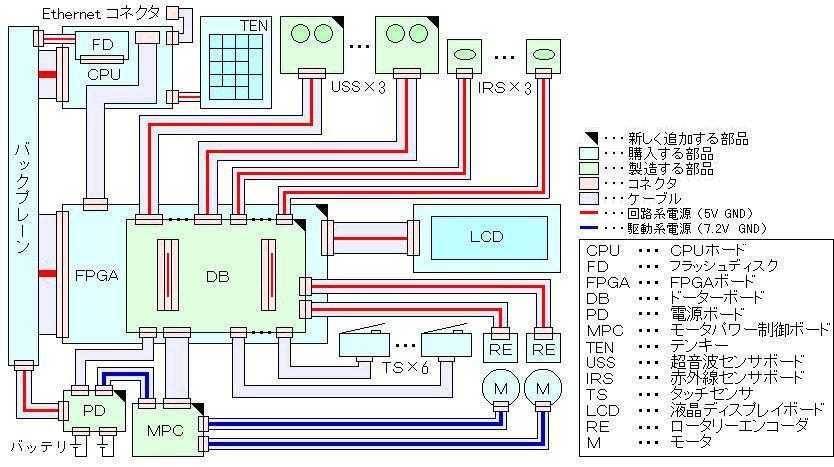
図2.MIRS0004エレクトロニクス回路ブロック
各部の機能- CPU ボード部 (CPU)
CPUボードの仕様
- 名称 NEAT-460
- CPU AMD80486DX5
- CLOCK 133MHz
- 外形寸法 142mm x 183mm
- 販売元 日本データシステム株式会社
- FPGA ボード部(FPGA)
FPGAとは、PLD(Programable Logic Device)と呼ばれる購入後に論理回路を書き込める集積回路の一種で、比較的規模の大きなものを指すことが多い。またFPGAボードでは、デジタル信号しか処理できない。
MIRS0004ではFPGAボードを使って以下の機能を実現する。
- タッチセンサ信号の処理
- 赤外線センサ信号の処
- パワーオン信号の処理
- 超音波センサ信号の処理
- ロータリーエンコーダ信号の処理
- 液晶表示ディスプレイ制御信号の処理
- モータパワー制御信号の処理
- ハードウェア割り込み処理
- 上記の各入出力機能の制御
- ドータボード部 (DB)
ドーターボードは、以下のような機能を持つ。- ドーターボードを通してFPGAボードにつながる各基板に電源(5V GND)を供給する。
- 液晶ディスプレイボードのコントラストアドジャストを行う。
- タッチセンサ(マイクロスイッチ)から入力されるスイッチ入力のチャタリング除去を行う。
- 超音波センサ選択信号によって選択された超音波センサをFPGAボードの超音波センサ信号処理モジュールに接続する。
- NEC製 IC μPD4701 を用いてロータリーエンコーダから送られるエンコード信号のカウントを行う。
- FPGAボードから送られてくるMPC信号を用いて、MPCボードのフォトカプラを動作させる。
- PDボードから送られてくる駆動系電源ON信号からパワーオン信号を作ってFPGAボードに出力する。
- 液晶ディスプレイ部(LCD)
液晶ディスプレイ(LCD)はMIRSの状態を表示するためのものである。
FPGAボードの液晶ディスプレイ制御モジュールはLCDの制御を行うためのもので、FPGAボード内のFPGAチップに構成される。MIRS0004LCD技術調査 - ロータリーエンコーダ
タイヤの回転数をパルスにして、回転子の回転数&速度の検出を行う。 仕組みはLEDの光を、スリットで通過、遮断させ、それを受光素子で検出後、信号にする カウンタ回路はカウンタ(7bit)と方向判別(1bit)の両方を兼ね備えている。
製品にコネクタを接続し、タイヤの回転数(アナログ量)をパルス数(デジタル量)に変換する機能がある。MIRSでは最も一般的な光電式を使用する。ロータリーエンコーダは、回転軸の回転速度に比例した、互いに90°位相の異なる2相の近似正弦波を出力しているもので、2相の位相関係から回転方向が判別できる。他に、2相の信号をカウントして回転数を求めることができる。 一般的なロータリーエンコーダの使用方法は、回転子の回転数の検出、 更に、回転子の速度の検出である。MIRS0004ロータリーエンコーダ技術調査 - タッチセンサ
マイクロスイッチを用い、スイッチ押下時のチャタリングを除去した信号を送る。
障害物(壁、ポール)に衝突した場合、MIRSがこれを認識するためにこれを使用する。MIRS0004タッチセンサ技術調査 - 超音波センサ
送信信号により超音波を発信し、その超音波の受信により受信信号を出力する。
MIRSにおいて、障害物の検知・距離測定と自機座標の確認をするセンサ。MIRS0004超音波センサ技術調査 - 赤外線センサ
赤外線センサ回路は赤外線の受光状態を2つの値(反応有り,無し)で得るようになる。この回路は赤外線センサの受光素子から送られてくるH 又は Lの信号を処理し、信号に状態変化が起きたときに割り込み要求信号をCPUに送る機能を有する。MIRS0004赤外線センサ技術調査 - PWM回路
PWM回路では、モータを制御する信号であるPWM信号を作り出し、方向データとともに出力する。速度データとカウンタのカウント値との比較によりPWM信号を形成する、この信号のDuty比は0%から50%で、これを128段階に分けている。これは過去の卒研において、Duty比が40%位でもモーターの回転数が十分速いことがわかっているためである。 - モータ
MIRS本体の駆動部分。ここの回転によりMIRSを動かす。
DCモータは、電源から供給される電力に応じて回転力を発生する電気エネルギー → 機械エネルギ変換器である。一般的に言う直流モーターであり、直流電源で回すことができる。
モータはPWM制御部からのパルスによってエネルギーを供給されることにより動作する。このパルス幅を変調することによってモーターへの供給エネルギーを調整し、モータの回転数を調節することが出来る。 - 電源ボード
電源制御ボードは、主に2つの機能を持つ。
1.各ボードの電源として+5Vの電圧を出力する回路。
2.非常停止スイッチ用コネクタにより、モーターの電源のみをカットする事を可能にする。
- CPU ボード部 (CPU)
- エレクトロニクス回路基板外形
- 下記については標準MIRS基板を使用するので MIRS データベースを参照すること。
- CPU ボード仕様(暫定版) MIRSATLMーDSGN-0003
- FPGA ボード(暫定版) MIRSATLMーDSGN-0003
- モータパワー制御ボード製造仕様書 MIRSDBMD-SBRD-0800
- 赤外線センサボード製造仕様書 MIRSDBMD-SBRD-0500
- 超音波センサボード仕様(暫定版)MIRSATLMーDSGN-0003
- 電源ボード仕様(暫定版)MIRSATLMーDSGN-0003
- ドータボード
- FPGA の20pin ジャンパコネクに接続したとき、ISA ラックに収納可能なこと。
- IO 接続がコネクタが ISA ラックの外に出て、ケーブルの取外しが容易であること。ただし、不必要にラックの外に飛び出さないこと。
- ボード外形を図3に示す。
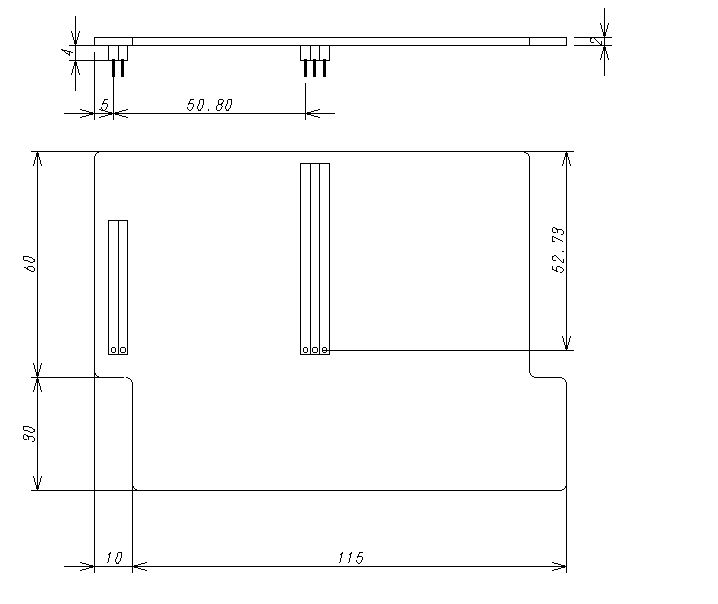
MIRS0004ドータボード技術調査
- 下記については標準MIRS基板を使用するので MIRS データベースを参照すること。
- ソフトウェアビジビリティ
本システムのソフトウェアビジビリティはATL-MIRSソフトウェアビジビリティ(暫定版)の仕様と同一である。
5 ソフトウェア
- ATL-MIRS 標準 ライブラリ
ATL-MIRS用に開発された標準ライブラリを使用する。
ATL-MIRS 標準 ライブラリユーザマニュアル(現在作成中)
参考 MIRSATLM ソフトウェア仕様書 - 動作モードとその遷移
- 動作モード
- 回避モード
スタート時にMIRSの進む直線上にポストがあった場合に行われるモード(回避理由は行動計画書に記す) - リセットモード
MIRS0004の状態を初期に戻すモード - 獲得トレースモード
ポストの獲得をトレースするモード - 補助探索モード
直進して反対の壁まで行きついた後に実行するモード - ポスト探索モード
ポストの位置を探索するモード - 自己位置修正モード
ポストを獲得した後に元の直進していた位置まで戻るモード
- 回避モード
- モード遷移
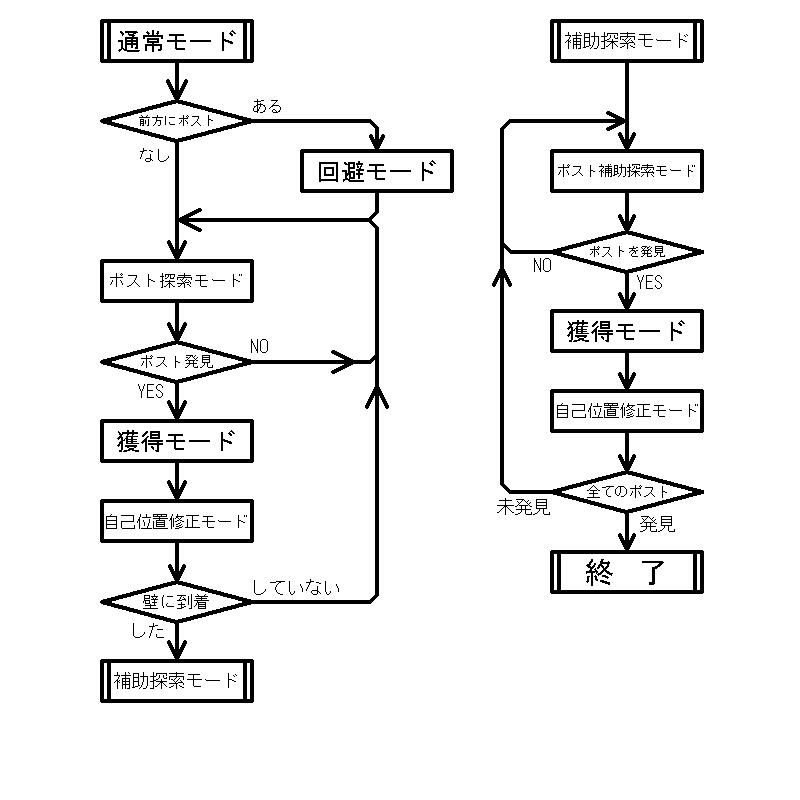
図4. モード遷移図
①前方にポストを発見
②前方にポストを発見せず
③ポストを発見
④ポスト獲得モードに入った位置まで戻る
⑤探索モードが終了
モード遷移表 \遷移
遷\後
移前\初期状態 リセットモード 回避モード 獲得トレースモード 補助探索モード ポスト探索モード 自己位置修正モード
初期状態 ― × ポストが進路上にある場合 ポストがスタート位置の真横にある場合 × ポストが進路上に無い場合 ×
リセットモード リセットスイッチが押された場合 ― × × × × ×
回避モード × × ― × × 直進上にポストが存在する場合 ×
獲得トレースモード × × × ― × × ポストを獲得した場合
補助探索モード × × × 未獲得ポストを発見した場合 ― × ×
ポスト探索モード × × × ポストの発見 反対がわの壁まで到着した ― ×
自己位置修正モード × × スタート上のポストを獲得した後、直進上にポストが存在する場合 × 自己位置の修正完了(直前が補助探索モード) 自己位置の修正完了(直前がポスト探索モード) ― - モジュール定義
- 直進走行モジュール
定義:ロータリーエンコーダを用いて MIRS を指定した距離直進させるための関数群。
API:PWM/エンコーダ関数 - 回転モジュール
定義:ロータリーエンコーダを用いて MIRS を指定した角度その場回転させる関数群。
API:PWM/エンコーダ関数
- モードの構成要素
- 回避モード
直進モジュール、回転モジュール、PWM/エンコーダ API、超音波センサ API - 獲得トレースモード
超音波センサ API、赤外線センサ API、PWM/エンコーダ API - 補助探索モード
超音波センサ API、赤外線センサ API、タッチセンサ API、直進モジュール、回転モジュール - ポスト探索モード
超音波センサ API、赤外線センサ API、直進モジュール、回転モジュール、PWM/エンコーダ API - 自己位置修正モード
超音波センサ API、直進モジュール、回転モジュール、PWM/エンコーダ API - リセットモード
6 システム試験
- システム試験概要
システム試験はシステムの組立が完了した段階で、基本設計書の内容に適合しているかどうかを試験する。システム試験を実施する際には、各サブシステムで規定されるサブシステム試験に合格していなければならない。 試験は以下の項目について行われる。
- 外形試験
*各部はしっかりと固定されているか。
*欠落している部分はないか。
*規定内に寸法は収まっているか。
- センサ機能試験
*各種センサは正確に動作しているか
- 規定走行試験
*行動計画書に示されたとおりにMIRSが走るか。
- 競技プログラム試験
*実際の競技会を想定して競技会で使うフィールドで試験を行う。
- 外形試験
- システム試験詳細
システム試験の詳細は、下記の試験仕様書に記載される。
MIR0004システム試験仕様書
関連文書 - モジュール定義
- 動作モード