外観およびセンサ配置図
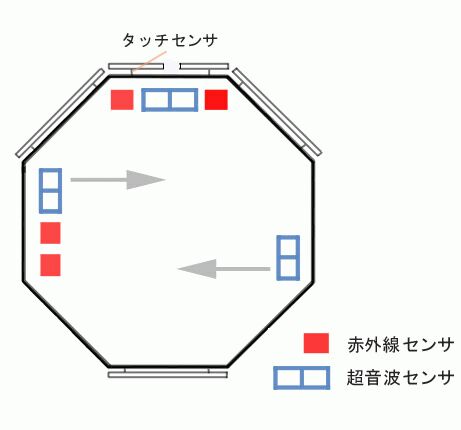
各センサの概要
動作の概要
以下に動作の流れを示す。
動作の流れ
(1)初期設定
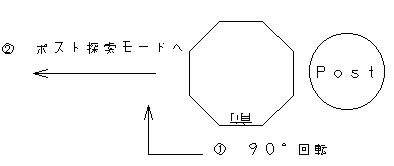
(2)ポスト探索
以下のルートを回りポストを探索する。
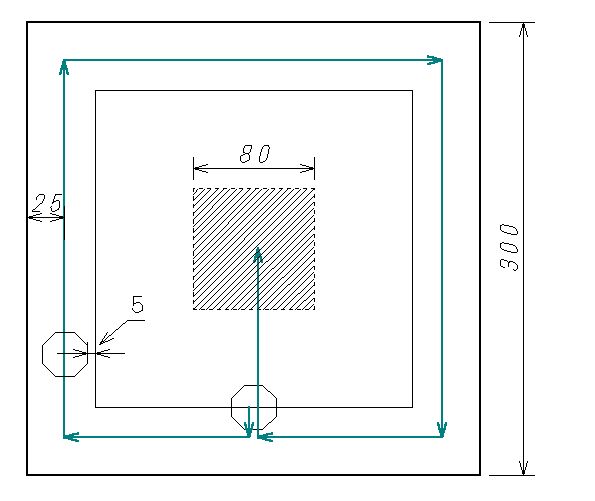
スタート位置から20cm後退し、壁から45cmのラインの5cm内側を時計回りに移動する。その際に本体左に配置した超音波センサでポストの探索を行う。周回中は真中の80cm四方の部分の探索は行わず(超音波がとどかないであろう。)、最後に真中へとポストを探しに行く。
(3)ポスト獲得
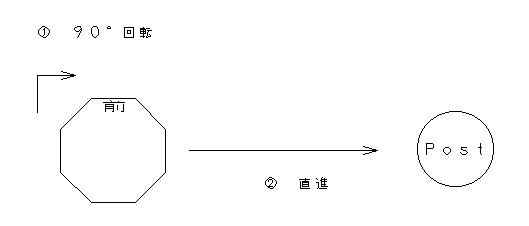
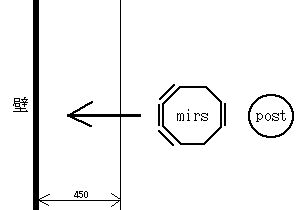
①ポストを発見したらポストの方へ車体を向け、ポストへ直進する。
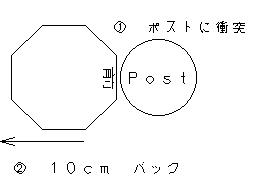
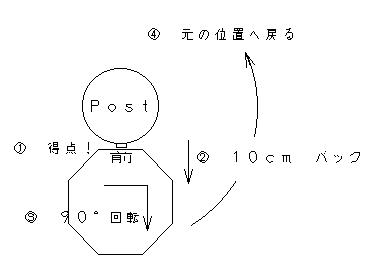
②ポストへ接触したら、10cm後退する。
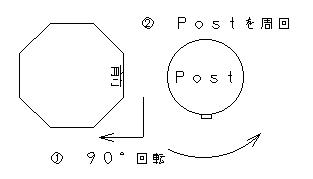
③90°回転し、ポストを反時計回りに回る。
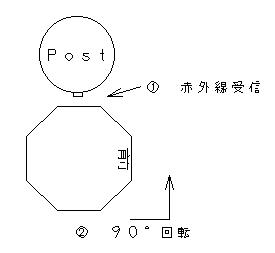
④左側に設置した赤外線センサで赤外線を受信し、ポストに正面を向く。
⑤ポストを獲得したのを全部の赤外線で確認し、ポストを反時計回りに移動
⑥360°移動したらルートへ戻る。
①ポストを獲得したら壁へ向かって直進する。
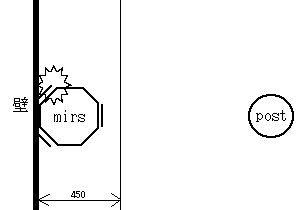
②壁へ接触したら、10cm後退する。
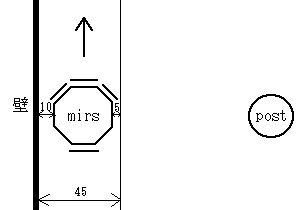
③車体を90°回転し、ルートへ復帰する。
3. 行動計画の方針および特徴
- 超音波センサ右・・・壁やポールとの距離を保つ(約40cm)
タッチセンサ・・・感知したら10cm後退する。
赤外線センサ左・・・スイッチ発見
赤外線センサ前・・・スイッチ押確認
| 関連文書 |
|---|