2. 開発システムの概要
(1)mirsの動作の特徴
(a)mirsの基本コンセプト
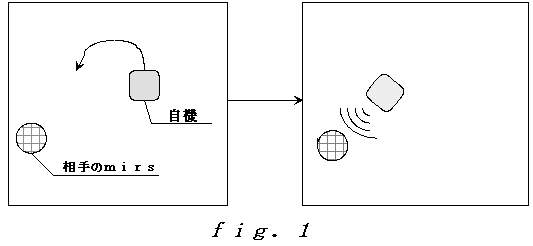
スタート時、相手のmirsと自機は互いに正面で向かい合っている。この競技に勝つには、相手の横を通り、後ろ側に回りこみ、相手の勝敗判定装置を押さなければいけないので、相手のmirsに自機の横を通過させなければ、この競技に負けることはない。従って、自分達のmirsの基本コンセプトは、相手のmirsを常に正面で捕えることによって、自機の横の通過を防ぎ、後ろ側へ回らせないというところにある。
(b)mirsの基本動作
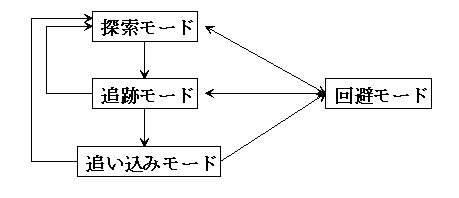 ・探索モード
・探索モード
スタート後、相手のmirsにぶつかるか、左右の超音波センサが反応するまで前進する。
・追跡モード
センサが反応したら、反応したセンサの方向へ相手のmirsを真ん中の超音波センサで捕らえるまで回る。その後、相手のいる方向へ前進する。 (回り方は、fig.1参照)
・追い込みモード
相手のmirsの近くまで動いたら、赤外線センサーが反応するまで追跡モードと同じ動きをし、反応したら相手も回りこんでくると思うので、回りこんできたところを回り込む。それまで、真ん中のセンサーで捕えている状態で、待機する。
・回避モード
常にシャフトエンコーダで座標を確認しているので壁には当たらないものとする。(空回りをしたら超音波センサーを使って、座標を確認する。)もし、相手とぶつかってタッチセンサーが反応したら相手が下がるまで動かない。その後、センサで捕えていたら追跡モード、反応が無かったら探索モードに変わる。