1:システムの目的
本機は、相手の動作に合わせ自機の動作を決定し、作戦通りに相手を動かし、勝利をおさめるものである。
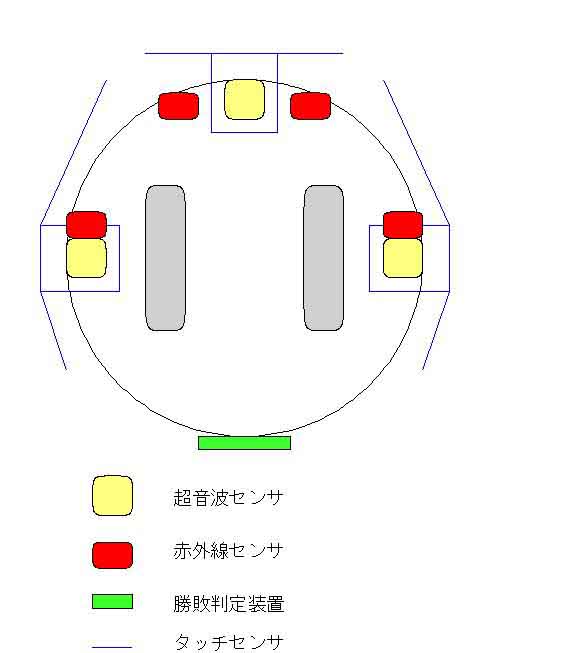
2:システムの外観
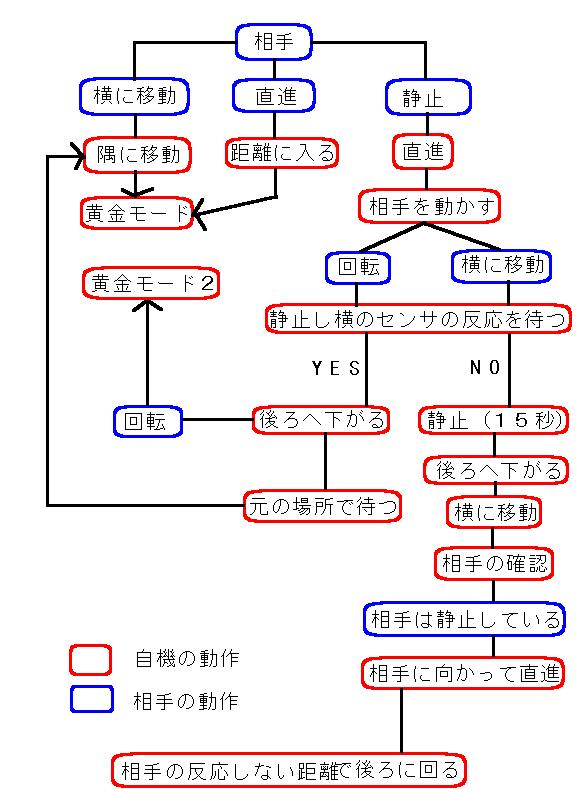
3:モード遷移図
4:モードの説明
まず、基本的に自機の動作は、通常状態では直線運動のみである。このため、本体に垂直に取り付けられた超音波センサからは、確実に、且つ正確に自機の座標が割り出せ、さらに壁と相手との区別も確実に行われるものとする。
・黄金モード
黄金モードとは、勝手に命名した、勝利を得るためのMIRSの動きである。このモードの目的は、他班が、試合中に相手を見失ったときに行う動作の盲点を突こうということにある。
以下に黄金モードの詳細を示す。
相手を見失ったときにする動作で、考えられることは、「一番近い壁の進入禁止 ゾーンで壁に背を向ける」ことだと思われる。このことを前提として、次のこと を考えた。
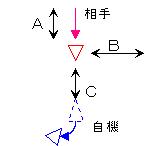
相手が自機にむかって直進してきたとする。上図のように、A,B,Cの距離を調べ、Cが一番短くなったとき、青の実線のように斜め後ろにさがる。相手が自機を見失い、壁に背を向けたところを後ろから追撃する。また、その時に自機は、進入禁止ゾーンに進入することになるが、この時点で追跡モードに入っているものとし、進入禁止ゾーンへの進入許可を得る。
また、この動作は、競技場の中央においてのみの行動ではなく、角などにおいて も、相手が自機に対して直線的に接近してくる全ての場合で行われる。
・黄金モード2

相手が一定時間以上静止していた場合相手を動かすために自機は相手に接近したり、それ以外でも一定距離内で相手と向かい合うことがある。そのときに相手が自機の後ろに回りこもうとする場合、上図のように、相手が自機の横を通過するまで、静止している。その目的は、相手の後ろに回りこむ場合、まず相手の横で超音波センサを用い相手の存在を確認する場合がある。そこで相手がいたと判断し後ろへ回りこんできたところを、その間に後ろにさがった自機は相手の勝敗判定装置を確認し、追撃する。