- 免責事項
本ドキュメントに記載されているモータパワー制御ボードは動作確認は行われているが実機での十分な試験を行っていません。そのため、このボード使用時のトラブルについては一切責任を負いません。
- はじめに
この仕様書は、MIRS標準機のモータパワー制御ボードの取扱方法と機能詳細を記載したものである。
- 取扱い説明
- 外観
モータパワー制御ボードの実装図、部品表はMIRSATLM モータパワー変換ボード製造仕様書参照
- 基盤の固定方法
- 部品、必要器具
MIRSSTND モータパワー制御ボード、ネジ x 4 (M3、長さは任意)、スペーサ x 4 (M3、長さは任意)、+ドライバー
- 手順
- 基板の実装図を参考にしながら基板の取り付け位置を決める。(実装図はMIRSATLM モータパワー変換ボード製造仕様書を参照)
- 配置場所のスペースや基板の高さを考慮して、スペーサの長さを決める。この時、基板の下に金属部品(アルミ板、ネジ、ナット等)があるときは、それらが基板に触れてショートする可能性があるのでスペーサは長めの物を使用する方が良い。
- 基板を取り付けたい位置に、基板の取り付け穴に合わせてφ3の穴をあける。
- Fig.1を参考にしながら、基板の取り付け穴にスペーサを取り付ける。
- 基板の取り付け位置に基板を取り付ける。
- ケーブルの接続
- 電源ボードとの接続方法はMIRSATLM モータパワー変換ボード - 電源ボードケーブル製造仕様書を参照。
- ドーターボードボードとの接続方法はMIRSATLM モータパワー変換ボード - ドーターボードボードケーブル製造仕様書を参照。
- モータとの接続方法はMIRSATLM モータパワー変換ボード - モータケーブル製造仕様書を参照。
- 機能説明
- 機能概要
MIRSATLM モータパワー変換ボードは・・・を行うためのボードである。この機能を実現するためにMIRSATLM モータパワー変換ボードでは以下のような機能構成を持つ。
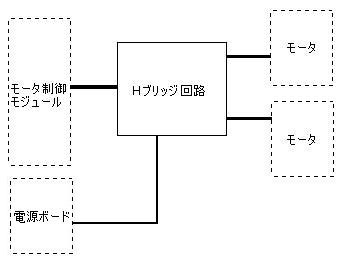
Fig.1 モータパワー変換ボードの機能構成図
- 機能詳細
機能詳細では、機能構成図(Fig.2)に示した各機能ブロックの詳細説明を行う。
- Hブリッジ回路
この部分はH-Bridge回路となっておりここにPWM信号、方向信号を入れることによってモータの速度、方向の制御を行っている。H-BridgeはOFFになっているときはブレーキがかかるような回路である。
- 動作原理
MIRSATLM モータパワー変換ボードは以下のような動作原理により設計・開発された。
モータパワー変換ボードはモータパワー制御モジュールから来るモータの速度、方向速度信号を実際にモータを駆動させるための信号に変換させるための回路である。今までのモータパワー変換ボードにはブレーキの機能は持っていなかった。そのためH-Bridgeを使いモータにブレーキをかけるための回路を作った。動作原理図を以下に示す。
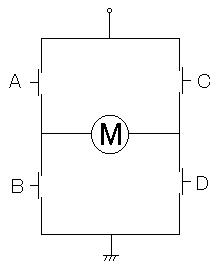
Fig.2 モータパワー変換回路の原理図
この原理図のようにH-bridgeは形成されている。この図のAとDのスイッチを入れることによってモータは回転する。また、BとCを入れることによってモータは逆回転する。さらにすべてのスイッチを上げることによってモータの逆起電力によってモータにブレーキがかかる。これを利用したのがモータパワー変換回路である。実際にはこの回路が1つのICの中に形成されているのでここに必要な信号を入力させることによってモータが制御できる。
- インターフェース
- コネクタ名称:MPC_CN1
MPC_CN1(ドータボードへ)
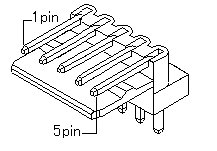
Fig.3 コネクタ形状
| No. | ピン名称 | 方向 | 内容 |
| 1 | Vcc | - | Vcc |
| 2 | S0 | IN | Xモータ方向信号 |
| 3 | S1 | IN | XモータPWM信号 |
| 4 | S2 | IN | Yモータ方向信号 |
| 5 | S3 | IN | YモータPWM信号 |
- コネクタ名称:MPC_CN2
MPC_CN2(電源ボードへ)
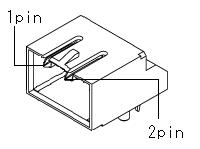
Fig.4 コネクタ形状
| No. | ピン名称 | 方向 | 内容 |
| 1 | Vin | - | モータ用+7.2V電源 |
| 2 | GND | - | GND |
- コネクタ名称:MPC_CN3,4
MPC_CN3,4(モータへ)
Fig.5 コネクタ形状
| No. | ピン名称 | 方向 | 内容 |
| 1 | Vout | - | モータ用電源 |
| 2 | GND | - | GND |
|
|