昗弨MIRS(MIRSSTND)偺IO惂屼奼挘儃乕僪偼丄傾儕僥僢僋幮偺D40-10-208(埲壓
IO惂屼儃乕僪偲徧偡丅)偵MIRS梡僪乕僞儃乕僪傪搵嵹偟偰幚尰偡傞丅婎斅忋偵搵嵹偝傟偰偄傞FPGA偼ALTERA幮EPC10K10QC208-4偱偁傞丅杮儃乕僪偱偼埲壓偺廃曈夞楬偺惂屼晹傪幚尰偡傞丅
| 柤徧 | IO port Address[hex] | R/W | Port Name | 婡擻 |
|---|
| LCD |
0100 | R/W | LCD Control |
LCD偺惂屼儗僕僗僞
| bit | 15-8 | 7-0 |
|---|
| 婡擻 | 枹巊梡 | LCD偺RS亖侽偺儗僕僗僞(LCD偺儅僯儏傾儖傪嶲徠) |
|
| 0102 | R/W | LCD Data |
LCD偺僨乕僞儗僕僗僞
| bit | 15-8 | 7-0 |
|---|
| 婡擻 | 枹巊梡 | LCD偺RS亖1偺儗僕僗僞(LCD偺儅僯儏傾儖傪嶲徠) |
|
PWM
怣崋惗惉 |
0110 | W | PWM 0 |
PWM弌椡侽怣崋惂屼
| bit | 15-8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|
| 婡擻 | 枹巊梡 | DIR(夞揮曽岦) | Duty暆傪7bit偱
愝掕
100%:1111111,0%:0000000 |
|
| 0112 | W | PWM 1 |
PWM弌椡1怣崋惂屼
| bit | 15-8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|
| 婡擻 | 枹巊梡 | DIR(夞揮曽岦) | Duty暆傪7bit偱
愝掕
100%:1111111,0%:0000000 |
|
Rotary
Encoder |
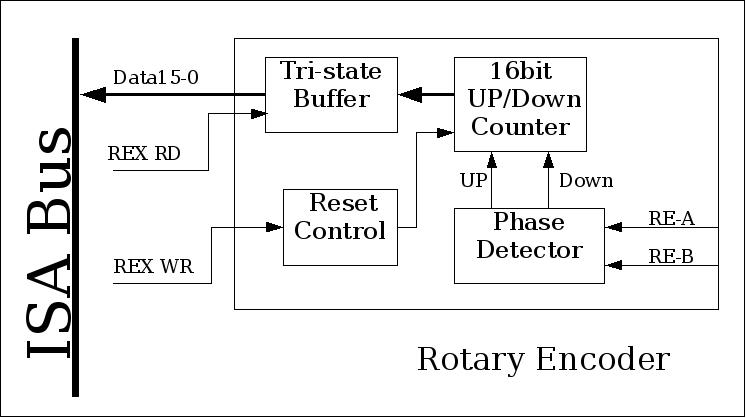
0120 | R/W | RE_X |
儘乕僞儕僄儞僐乕僟X偺惂屼
彂偒崬傒丗0x01傪彂偒崬傓偙偲偱僇僂儞僩抣偑儕僙僢僩偝傟傞丅
撉傒崬傒丗16bit偺僇僂儞僞僨乕僞偑撉傒崬傑傟傞丅儕僙僢僩偝傟側偄尷傝僇
僂儞僩抣偼愊嶼偝傟傞丅弴夞揮偱壛嶼偝傟丄媡夞揮偱尭嶼偝傟傞丅夞揮曽岦偺
弴丄媡偼儘乕僞儕僄儞僐乕僟偺俀憡偺僷儖僗偵傛傝敾暿偝傟丄A偑B傛傝恑傫偱
偄傞偲偒弴夞揮偲側傞丅晧偺抣偼俀偺曗悢昞尰偱偁傜傢偝傟傞丅
| bit | 15-0 |
|---|
| 婡擻 | 儘乕僞儕僄儞僐乕僟僷儖僗僇僂儞僩抣 |
|
| 0122 | R/W | RE_Y |
儘乕僞儕僄儞僐乕僟Y偺惂屼
X偲摨條
|
挻壒攇
僙儞僒 |
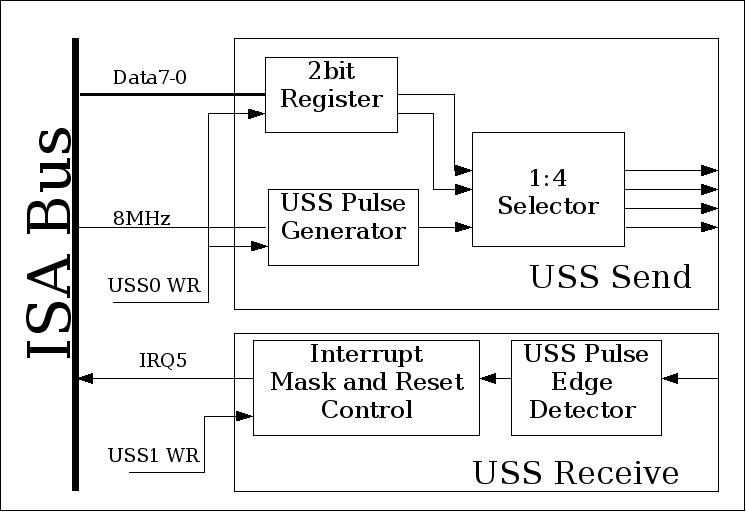
0130 | W | USS_Send |
挻壒攇怣崋偺憲怣
偙偺傾僪儗僗偵彂偒崬傓偙偲偵傛傝丄壓埵2bit偱帵偝傟傞挻壒攇僙儞僒憲怣婍偵40KHz偺挻壒攇傪0.4ms娫憲怣偡傞丅
|
| 0132 | W | USS_Ctl |
挻壒攇庴怣怣崋妱傝崬傒偺惂屼
偙偺傾僪儗僗偵彂偒崬傓偙偲偵傛傝丄庴怣怣崋偵傛傞妱傝崬傒偺儅僗僋丄儕
僙僢僩傪峴偆丅bit侾偵1傪彂偒崬偲儅僗僋丄0偱傾儞儅僗僋丅bit0偵侾傪彂偒
崬傓偲儕僙僢僩丅
|
斈梡
擖椡 |
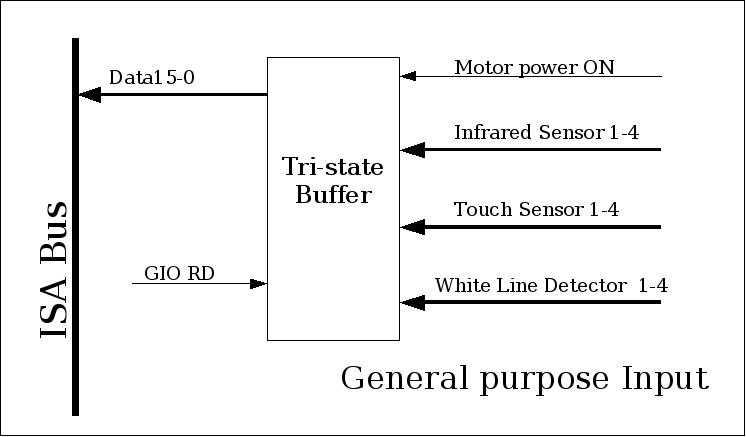
0140 | R | GIO |
僨僕僞儖擖椡擖椡
昗弨MIRS(MIRSSTND)偱偼係庬椶偺擖椡怣崋傪偙偺億乕僩偐傜撉傒崬傓丅
- MP:儌乕僞梡揹尮偺ON/OFF
- WLS1-4:敀慄僙儞僒1-4
- IRS1-4:愒奜慄僙儞僒1-4(愒奜慄僙儞僒偺桳柍偺傒丅僐乕僪敾暿偼0x15X億乕
僩偱愝掕偟撉傒崬傓)
- TS1-4:僞僢僠僙儞僒1-4
| bit | 15 | 14-12 | 11-8 | 7-4 | 3-0 |
|---|
| 婡擻 | MP | 枹巊梡
| WLS | IRS | TS |
| 4 | 3 | 2 | 1 |
4 | 3 | 2 | 1 |
4 | 3 | 2 | 1 |
|
愒奜慄
僐乕僪 |
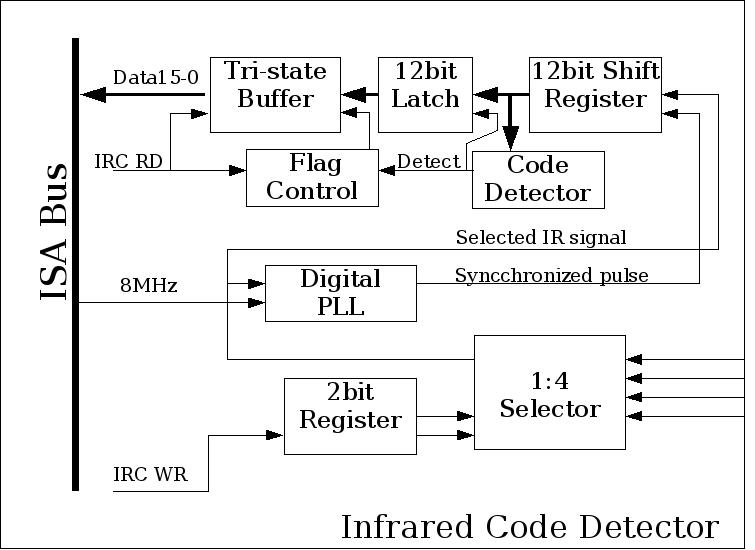
0150 | W | IRS_sel |
愒奜慄僐乕僪暅挷僙儞僒偺巜掕
偙偺傾僪儗僗偵彂偒崬傓偙偲偵傛傝丄壓埵2bit偱帵偝傟傞愒奜慄僙儞僒偺晞崋
専弌傪奐巒偡傞丅嵟掅偱傕僐乕僪偺弌椡廃婜埲忋偺帪娫(20ms)曐帩偟側偗傟偽側傜側
偄丅
| bit | 15-2 | 1 | 0 |
|---|
| 婡擻 | 枹巊梡 | 僙儞僒斣崋
00:IRS1
01:IRS2
10:IRS3
11:IRS4
|
|
| 0152 | R | Ir_Code |
愒奜慄専弌僐乕僪
flag:僐乕僪専弌偟偨偲偒侾偵僙僢僩偝傟丄偙偺傾僪儗僗傪撉傒崬傓偲儕僙僢
僩偝傟傞丅
| bit | 15 | 14-12 | 11-0 |
|---|
| 婡擻 | flag | 枹巊梡 | 僐乕僪(僐乕僪偼愒奜慄晞崋弌椡婍偺巇條傪嶲徠偡傞偙偲) |
|