MIRSMG5 管理台帳へ戻る
| 名称 |
RaspberryPi OS のインストールとセットアップ |
| 番号 |
MIRSMG5D-SYST-0004 |
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2024.03.11 |
小谷 |
小谷 |
初版 bookworm対応版 |
| A02 |
|
小谷 |
小谷 |
OSのバージョン、WiFi設定方法の更新 |
1. OSのmicroSDカードへの書き込み(この作業は予め準備してある)
- RaspberyPi公式サイトからRaspberry Pi Imagerをダウンロードする。
- Raspberry Pi OS bookwormのイメージファイル(2024-07-04-raspios-bookworm-arm64.img.xz 1.1GB)をダウンロードする。
- microSDをインストール作業するPCにセットする。
- Raspberry Pi Imagerを起動する。
- Raspberry Piデバイス(RASPBERRY Pi 4)を選択する。


- OSを選ぶ(カスタムイメージを使う)とSDカードを選択する。

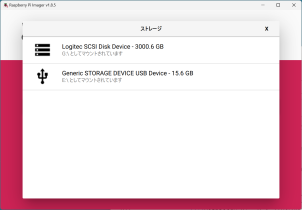
- OSとmicroSDを選択すると[次へ]ボタンが有効になるのでクリックする。

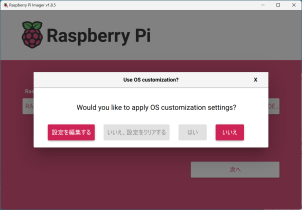
- カスタム設定を適用するか聞かれるが、「いいえ」を選択。最終確認で書き込むmicroSDが間違っていないか確認し「はい」で書き込み開始(書込み所要時間 約20分)。

2. Raspberry Pi OSの起動
- RapsberryPi(以下 RPi)にmicroSDを挿し、ディスプレイ、ワイヤレスキーボード・マウスのレシーバーを接続する。
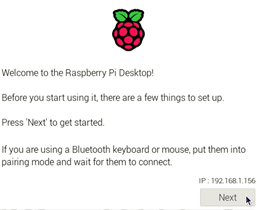
- RPiに電源ケーブルを接続する。ファイルシステムの構築が自動で行われ、数回再起動したのち起動する。
- 初回起動時に出る設定画面を順次設定する。
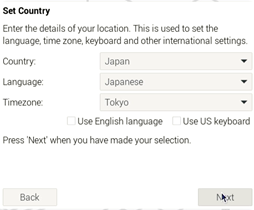
Set Countryで国(Japan)、言語(Japanese)、タイムゾーン(Tokyo)を設定する。

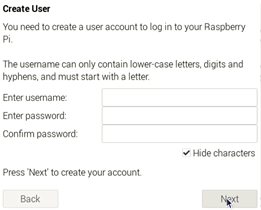
- ユーザ作成
ユーザ名:pi
パスワード:raspi
- WiFiの設定は、「Skip」をクリックし次に進む。

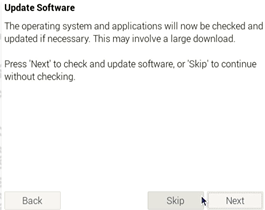
- Software Updateは「Skip」をクリックし次に進む。
- OSを再起動させる。
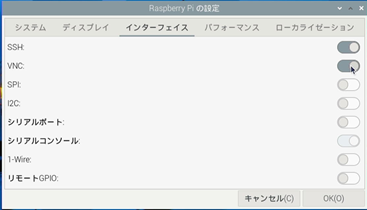
- 設定メニューを選択し、InterfaceタブでSSH、VNCを Enable に変更する。

- ローカライゼーションタブでローケル、タイムゾーン、キーボード、無線LANの国を確認する
ローケル
言語: ja(japanese)
文字セット:UTF-8

タイムゾーン
地域:Asia
位置:Tokyo
 キーボード
キーボード
モデル:Generic 105-Key PC
配列:Japanese
種類:Japanese
 無線LANの国
無線LANの国
国:JP Japan

- 再起動する
3. 無線LANの接続
以下の1、2のいずれかの方法でWiFiに接続させる。
- 学内WiFi接続の方法 (CLI)に則ってコマンドラインでWiFiの設定を行う。(学内専用)
- 学内WiFi接続の方法 (GUI)に則ってGUI環境ででWiFiの設定を行う。(学内専用)
MIRS用SSIDを設定する場合に参照する項目
デスクトップ右上にあるLANアイコンをクリックし、MG3のアクセスポイントを選んでパスフレーズを入力し接続する。
(パスフレーズはMG3無線LAN管理者に確認すること。また無線LANアダプタのMACアドレスの事前登録が必要。)
4. パッケージリストとパッケージのアップデート
- sudo apt-get update
- sudo apt -y upgrade ※約10~20分の時間を要する
5. Arduino IDE のインストール
- sudo apt -y install arduino
6. Python版 OpenCVのインストール
- sudo apt install -y libopencv-dev python3-opencv
7. WiringPi のインストール
参考:WiringPi 2.70をRaspberry Pi OS(Bullseye)にインストールとLチカ、Busterにも
- git clone https://github.com/WiringPi/WiringPi.git
- cd WiringPi
./build
確認(バージョン確認)
- gpio -V
2.0 20240307インストール時はv 3.0
8. OpenCV C++対応ライブラリのインストール(最初に配布されたSDは設定済み)
C++対応版はパッケージ化されていないため、ソースコードからコンパイルを行ってインストールする必要がある。
参考1:Raspberry Piへのコンピュータビジョンの実装
参考2:pkg-configを使ってg++でコンパイルできるようになるまで
- インストール 2つのスクリプト(opencv_pre_pkg_inst.sh, oepncv_install.sh)をホームディレクトリに置いて、実行権を与え順に実行する。
- wget https://www2.denshi.numazu-ct.ac.jp/mirsdoc2/mirsmg5d/syst/num0004a/opencv_pre_pkg_inst.sh
- wget https://www2.denshi.numazu-ct.ac.jp/mirsdoc2/mirsmg5d/syst/num0004a/opencv_install.sh
- chmod +x opencv_pre_pkg_inst.sh
- chmod +x oepncv_install.sh
- ./opencv_pre_pkg_inst.sh
- ./oepncv_install.sh
opencv_pre_pkg_inst.sh の実行時間は5分程度
opencv_install.sh は実行時間は約6時間(ほとんどは cmake --build . の実行時間)
- インストール後の設定 opencv4.pcファイルを /usr/lib/pkgconfig のディレクトリに置く
- wget https://www2.denshi.numazu-ct.ac.jp/mirsdoc2/mirsmg5d/syst/num0004a/opencv4.pc
- sudo cp opencv4.pc /usr/lib/pkgconfig
9. Arduinoソフトウェアのインストール
MIRSMG5D-SOFT-0003を参照しながらArduino ソフトウェアソースコードをインストールする
- wget https://www2.denshi.numazu-ct.ac.jp/mirsdoc2/mirsmg5d/soft/num0003a/mg5_arduino_ver100.zip
- unzip mg5_arduino_ver100.zip
10. MIRS標準プログラムのインストール
MIRSMG5D-SOFT-0007を参照しながらMIRS標準プログラムをインストールする
- wget https://www2.denshi.numazu-ct.ac.jp/mirsdoc2/mirsmg5d/soft/num0007b/mg5_pi_ver1.0.0.tar.gz
- tar xvfz mg5_pi_ver1.0.0.tar.gz
- cd mg5_pi_ver1.0.0
- make
11. 日本語入力環境 FCITX-MOZCのインストール
参考:bookwormの日本語入力にFcitx5をインストール
- sudo apt install fcitx5-mozc
- im-config -n fcitx5
- sudo reboot
12. アップデート・アップグレード
定期的に更新すること。
- sudo apt-get -y update
- sudo apt-get -y upgrade
- sudo rpi-update