MIRSMG5 管理台帳へ戻る
| 名称 |
Raspberry ソフトウエア解説 |
| 番号 |
MIRSMG5D-SOFT-0005 |
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2024.03.25 |
牛丸真司 |
小谷進 |
初版 |
Raspberry ソフトウエア解説
1. 概要
- MG5の Raspberry Pi の標準ソフトウェアは、MG4 の標準プログラムを 以下に示す部分を改定してほぼそのまま引き継いだものである。
- 標準プログラムでは、MIRSの動作・処理の機能モジュールと機能試験のためのテストプログラムを提供している。
- Raspberry Pi の GPIOの利用 および USB シリアル通信の実装には Wiring Pi ライブラリを使用している。
2. MG4の標準プログラムからのからの変更点
- Makefile 中の opencv を opencv4 とした。
- src/pilot.c のコンパイルで Warning が出ないようにした。
- src/ で実行ファイルの生成に関係しない2つのソースファイル
(circle_detect.c とcolor_binarize.c)を削除した。
3. モジュール構成
- 次のモジュール構成図で全体動作を管理する pilot.c のから呼び出される機能モジュール群を示している。また、その下のモジュール構成表は
各モジュールの概要を示している。なお、request.c と uss.c は direction.c からも呼び出される。
- 通常のループ処理は、usleep関数を用いた(ソフトリアルタイムの)定時実行を行っている。
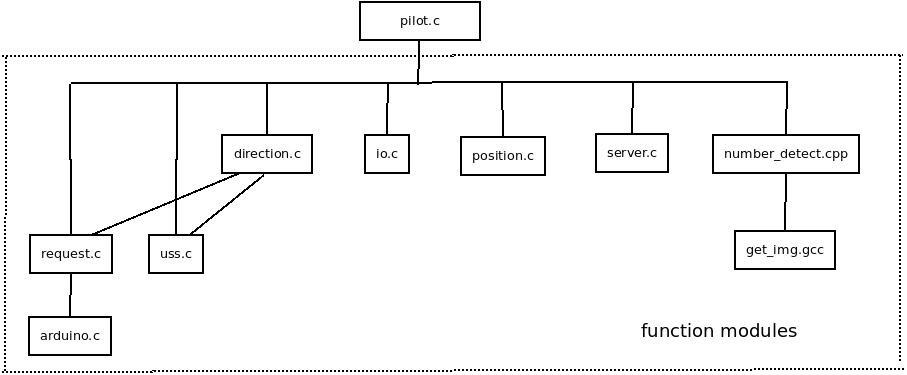
Raspberry Piモジュール構成図
| モジュール名 | 概要
|
|---|
| io | GPIO読み取り
|
| uss | 超音波センサ読み取り
|
| arduino | Arduinoとシリアル通信を行う
|
| request | Arduinoへ命令を送る
|
| direction | 正対補正のための回転量を決める
|
| get_img | 画像撮影する
|
| number_detect | 数字認識する
|
| server | サーバとの通信を行う
|
| positionr | 自己座標を保持する
|
3.バージョンアップ履歴
- Ver1.0 (2024年3月リリース)