- 下のモジュール構成図ではば、全体動作を管理する pilot.c のから呼び出される動作モード単位の制御を定義した routin_xxx.c があり、その下に標準プログラムが提供する下位モジュールが位置する構成となっている。
- 通常のループ処理は、usleep関数を用いた(ソフトリアルタイムの)定時実行を行っている。
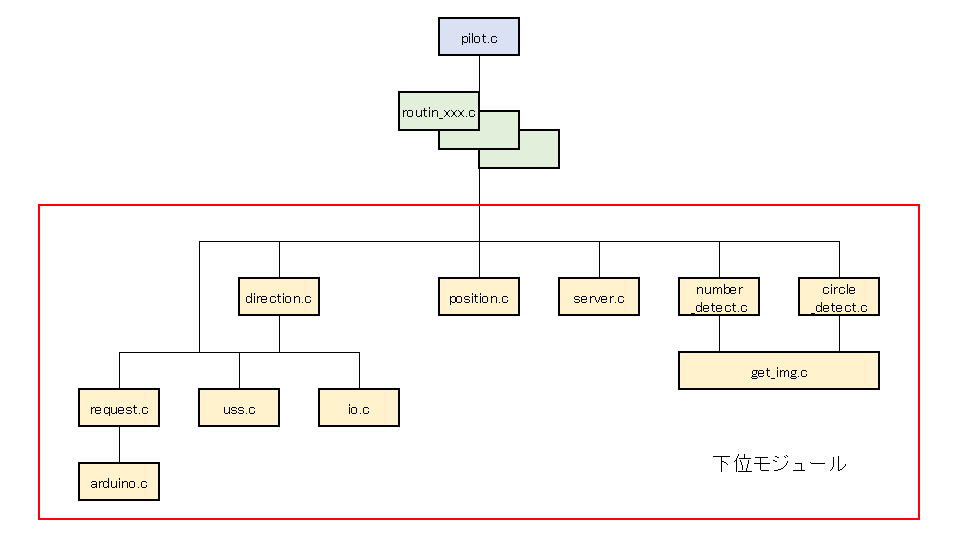
Raspberry Piモジュール構成図
モジュール名 概要 io GPIO読み取り uss 超音波センサ読み取り arduino Arduinoとシリアル通信を行う request Arduinoへ命令を送る direction 正対補正のための回転量を決める get_img 画像撮影する number_detect 数字認識する circle_detect 風船認識する server サーバとの通信を行う positionr 自己座標を保持する