このドキュメントはMIRSATLMのロータリエンコーダ周辺回路についてまとめた技術資料である。
ロータリエンコーダというものは、アナログ量であるモータの回転数をディジタル量としてカウントするものである。これによって、モータの回転数からMIRSが自己位置を認識できるようになる。MIRSのロータリエンコーダ部は大きく分けて2つの部分から構成される。一つ目は、モータの回転数を90度位相がずれた矩形波に変換させるマイクロエンコーダ、そしてその回転数をカウントするFPGA内に構成されるロータリエンコーダモジュールである。その二つを組み合わせることによってアナログ量であるモータの回転数をディジタル量でカウントしている。MIRSでは、光学式のロータリエンコーダを用いている。
- ロータリエンコーダとは
製品にコネクタを接続し、タイヤの回転数(アナログ量)をパルス数(デジタル量)に変換する機能がある。MIRSでは最も一般的な光電式を使用する。ロータリーエンコーダは、回転軸の回転速度に比例した、互いに90°位相の異なる2相の近似正弦波を出力しているもので、2相の位相関係から回転方向が判別できる。他に、2相の信号をカウントして回転数を求めることができる。 一般的なロータリーエンコーダの使用方法は、回転子の回転数の検出、 更に、回転子の速度の検出である。
- 光学式ロータリエンコーダの概要
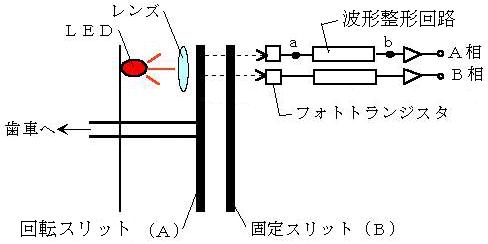
fig.1 光学式ロータリエンコーダの概要
ロータリーエンコーダからの出力信号は近似正弦波形であるので、これを波形整形回路でパルス波形にする。fig.2にその波形の変化を示す。
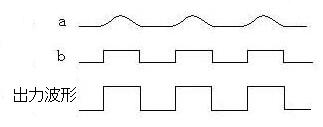
fig.2 波形の変化図 - 回転方向の判別
パルス整形回路からの出力信号A,Bの組み合わせには、回転方向により2つのパターンがある。
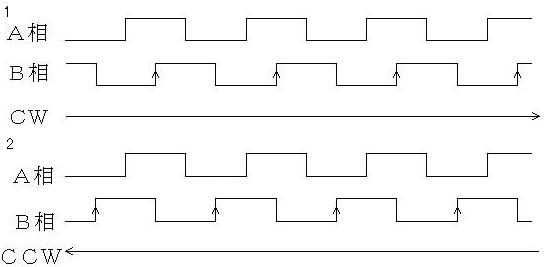
fig.3 回転方向の判別方法
1の場合、B信号の立ち上がり時にA信号は必ず"H"になっているときと2の場合のようなB信号の立ち上がり時にA信号は"L"になっている場合の二つによって回転方向が判別できる。 - 回転数のカウント
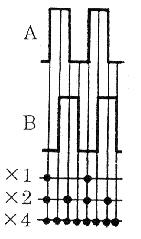
fig.4 カウント法(タイヤの回転数)=(ロータリエンコーダカウント値)/1600
- マイクロエンコーダ
MIRSでのマイクロエンコーダは、maxonのモータと一体化したものです。
供給電圧 5V(-10/+10%) 出力信号 TTLコンパチブル 立ち上がり時間 200ns 下降時間 50ns チャンネル数 2 カウント/回転 100 使用温度範囲 -20/+85℃ コード・ホイール慣性モーメント =<0.05gcm2 最大加速度 250000rads-2 最大出力電流/チャンネル 5maA 位相差 90°e(-45/+45°e) 最大周波数 20kHz