- はじめに
この仕様書は、ATLMIRSのFPGAボード内のFPGAチップに構成するモータパワー制御モジュールの取扱方法と機能詳細を記載したものである。
- 取扱い説明
- Maxplus2での回路情報の呼び出し方法
- ダウンロードファイル
mpc_m.zip
- 手順
- 圧縮ファイル mpc_m.zip をダウンロードします。
- mpc_m.zip を適当なフォルダで解凍します。
- maxplus2でグラフィックエディタを開きます。
- 解凍ファイルの中にある mpc_m.sym をグラフィックエディタで部品として呼び出します。
- 圧縮ファイルの内容
mpc_m.zip には以下のファイルが入っています。
- mpc_m.acf
- モジュールのコンフィギュレーションファイル(デバイスやピン情報などが入っている)です。
- mpc_m.gdf
- モジュール全体のグラフフィックエディタのファイルです。
- mpc_m.sym
- MPCモジュール全体のブロックシンボルです。
- mpc_latch.vhd
- 機能構成図(Fig.1)に示す ラッチ回路ブロックのVHDLファイルです。
- mpc_latch.sym
- 出力制御回路のブロックシンボルです。
- mpc_ctrl.vhd
- 機能構成図(Fig.1)に示す 出力制御回路ブロックのVHDLファイルです。
- mpc_ctrl.sym
- 出力制御回路のブロックシンボルです。
- count_7bit.vhd
- 機能構成図(Fig.1)に示す カウンタ回路ブロックのVHDLファイルです。
- count_7bit.sym
- カウンタ回路のブロックシンボルです。
- pwm.vhd
- 機能構成図(Fig.1)に示す PWM回路ブロックのVHDLファイルです。
- pwm.sym
- PWM回路のブロックシンボルです。
- 機能説明
- 機能概要
MIRSATLM FPGAボード モータパワー制御モジュールは駆動モータのスピード、回転方向を行うためのものであり、FPGAボード内のFPGAチップに構成される。この機能を実現するためにMIRSXATLM FPGAボード モータパワー制御モジュールでは以下のような機能構成を持つ。
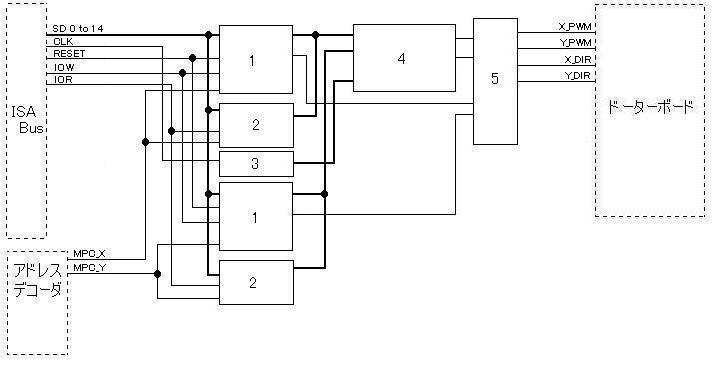
Fig.1 FPGAボード モータパワー制御モジュールの機能構成図(mpc_m_block.jpg)
- ラッチ回路
この回路は、データ書きこみ時にそのデータを保持し、次にデータが来るまでデータを保持しておく機能を持つ。
- 出力制御回路
この回路は、データ呼出し命令がきたときにデータをISAバスにデータを送る機能を持つ。
- 128進カウンタ
この回路は、PWM回路でPWM信号を作るために必要なカウンタをクロックから生成している。
- PWM回路
この回路は、モータ制御用のパルス信号を生成する回路で、128進カウンタの値と指定されたデータを比べてデータが大きいとき'0'をデータが小さいときに'1'を出す比較回路である。
- オープンドレイン変換部
この部分はMPCについているフォトカプラを駆動させるために出力をオープンドレインに変換させている回路である。
- 機能詳細
モータパワー制御モジュールではモータの速度、回転方向を制御するために、PWM制御を用いる。PWM制御の詳しい説明はMIRSATLM モータパワー制御技術資料(MIRSATLM-TECH-1002)を参照のこと
以下では、機能構成図(Fig.1)に示した各機能ブロックの詳細説明を行う。
- 入力制御回路
この回路は、左右のアドレスが指定され、バスの書きこみ命令があると、そのときにデータバスに送られてきているデータを次にデータが送られてくるまで保持し、出力制御回路に送りつづける。
また、その送られてきたデータ次のデータが来るまでを左右の速度データ、方向データに分けてラッチし、速度データはPWM信号回路に、方向データはオープンドレイン変換回路に次のデータが来るまで送りつづける。
- 出力制御回路
この回路は、左右のアドレスが指定されバスの読み取り命令があるとISAバスのデータバスにいま保持しているデータを送る。
それ以外の場合は、ハイインピーダンスを出力しておく。
- 128進カウンタ
この回路は、CLK信号から128進のカウンタを作り出している。この信号をPWM回路に入れることでPWM信号を生成する。出力は7ビットである。
- PWM回路
この回路は128進カウンタからのカウンタの値と、速度データを比べてデータの値が大きいときは'1'をデータの値が小さいときは'0'を出力する回路である。この回路を通すことによって、データによってDuty比の違うPWM信号を作り出している。この出力を、オープンドレイン変換回路に送る。これはMPCボードのフォトカプラを駆動させるために、オープンドレイン出力を使うために、HighとLowが逆になっている。
- オープンドレイン変換回路
フォトカプラを駆動させるためには、オープンドレインの出力が必要となるためにここで変換する。オープンドレインとは、オープンコレクタと電気的に等価であり、Highのときに出力がオープンとなり、Lowの時に出力がGNDに落ちるものである。そのため、Lowの時にフォトカプラを駆動させることができるのでPWM回路では、PWM信号がHigh,Lowが逆となっている。その後、この出力を、モータパワー制御ボードに送る。
- インターフェース
Table 4_1 モータパワー制御モジュールのインターフェース
信号名
|
方 向
|
対 象
|
概 要
|
MPC_X
|
IN
|
アドレスデコーダ |
モジュールセレクタ信号(Xモータ選択用)
|
MPC_Y
|
IN
|
アドレスデコーダ |
モジュールセレクタ信号(Yモータ選択用)
|
SD 0 to 15
|
IN
|
ISA-Bus |
16bit データバス
|
IOR
|
IN
|
ISA-Bus |
I/Oリード・ストローブ
|
IOW
|
IN
|
ISA-Bus |
I/Oライト・ストローブ
|
RESET
|
IN
|
ISA-Bus |
システム・リセット
|
CLK
|
IN
|
ISA-Bus |
システム・クロック 8MHz デューティ50%
|
X_PWM
|
OUT
|
ドーターボード |
Xモータ速度制御信号
|
X_DIR
|
OUT
|
ドーターボード |
Xモータ方向制御信号
|
Y_PWM
|
OUT
|
ドーターボード |
Yモータ速度制御信号
|
Y_DIR
|
OUT
|
ドーターボード |
Yモータ方向制御信号
|
|
|