3-1.全体の構成
-
3-1-1.全体の構成図
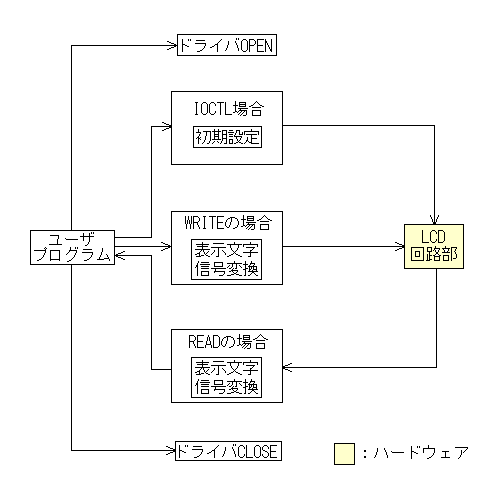
- ソフトウェア全体の構成図を以下の図に示す。
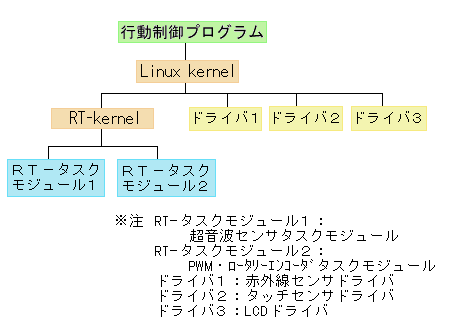
図3-1-1.全体の構成図
- タスクに関しては現在検討中。
ドライバには優先順位はない。
| 沼津高専 電子制御工学科 | ||||||
| ||||||
| 改訂記録 | ||||||
|---|---|---|---|---|---|---|
| 版数 | 作成日 | 作成者 | 承認 | 改訂内容 | ||
| A01 | 2000.7.19 | ソフト全員 | 大庭 | 初版 | ||
| B01 | 2000.10.5 | 田口 | 大庭 | 赤外線・タッチセンサドライバを除く全てを修正、インターフェース追加 | ||
| B02 | 2000.10.20 | 田口 | 大庭 | 全体の構成図とLCDドライバ構成図を変更 | ||
図3-1-1.全体の構成図
| タスク番号 |
使用タスク |
使用目的 |
| task1 |
超音波センサタスク |
タイムアウト用 |
| task2 |
ロータリーエンコーダタスク |
データ受け渡し用 |
| task3 |
PWMタスク |
データ受け渡し用 |
| FIFO番号 |
使用タスク |
使用目的(データ) |
| FIFO1 |
超音波センサタスク |
超音波センサ選択用 (超音波センサの番号) |
| FIFO2 |
超音波センサタスク |
距離データ格納用 (割り込みハンドラが起動された場合:距離データ タスク1が起動された場合:エラー値) |
| FIFO3 |
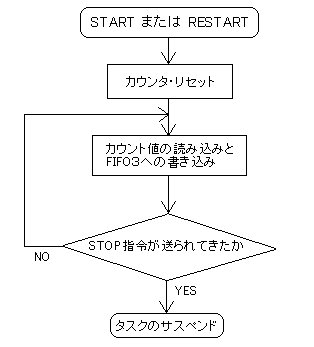
ロータリーエンコーダタスク |
ロータリーエンコーダの値書込用 (左右のロータリーエンコーダのカウント値) |
| FIFO4 |
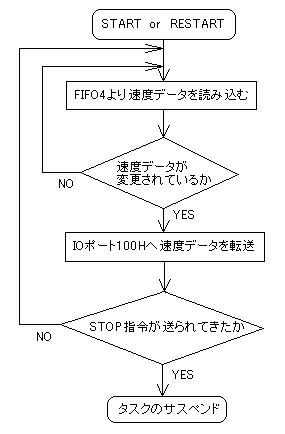
PWMタスク |
PWMへの速度データの受取用 (左右のタイヤへの速度データ) |
| FIFO5 |
ロータリーエンコーダ・PWMタスク |
START、STOP等の各種指令やタスクの優先度、実行周期の受取用 (START、STOP、RESTARTの指令と各タスクの優先度、実行周期) |
| 関連文書 |
|---|