1. 目的
本書は,超音波センサの基本性能を調査、理解し、後のシステム動作の研究に役立てる事が目的である
2. 超音波の性質
超音波は可聴音より高い周波数(20KHz以上)の音波で、伝搬速度は、空中で毎秒約340m/sの速度で伝わる。 超音波は周波数が高いため、回折作用が弱くなり直線的に伝播する。そのため、反射作用も強く、この傾向は周波数が高いほど顕著になる。これらの性質を利用して、MIRSでは距離計測及び自機座標の確認に用いる。
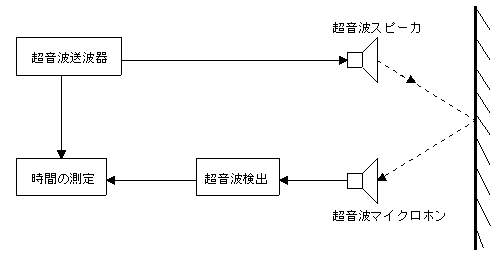
超音波による距離の計測には直接波の伝播時間を計測する方法と、図1のように反射波を利用する方法があり、MIRSでは後者の方法を用いる。 そのため超音波計測は、音波を反射することが条件である。綿、グラスウールなど柔らかくて空気を含んだ物体は、検知することはできない。また、物体の表面に凹凸がある場合も、音波が乱反射して検知が困難である。 さらに、超音波には減衰性があり、周波数が低いほど減衰する。MIRSで使用するセンサは40kHzで、6mまで計測可能である。
|
| 図1 超音波センサの原理 |
図1より、音は 1 [cm] 距離を約 28 [μsec] だけの時間をかけて進むので、超音波を発射してから物体に反射して戻ってくる迄の時間を測定すれば、超音波の送受波器から物体までの距離を知ることができる(図 1)。 超音波を発射してから、反射波が検出されるまでの時間を T [μsec] とすると、壁までの距離 dは d=音速×到達時間/2 で算出できる。
ここで音速Vは、温度の影響に対して次式で表される。
つまり、周囲温度によって音速が変化するので物体迄の距離を常に精度よく測定するには温度補正が必要となる。
3. 超音波センサーの構成
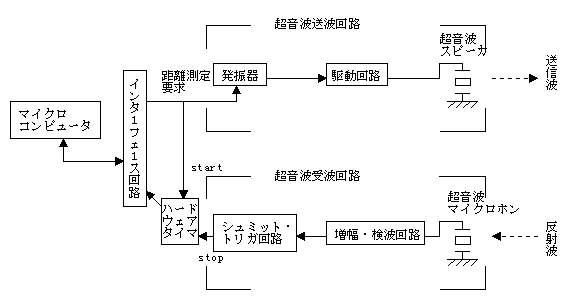
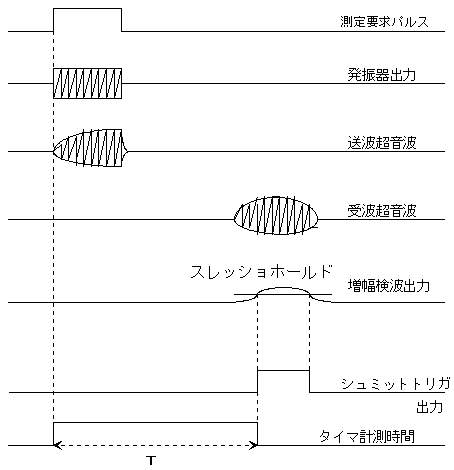
図 2 の構成による各部の波形の例が図 3 である。実際には反射波は物体の形によりエコーして残るが、この回路では反射波の先頭だけを検出して、最も近い所からの反射時間をはかる。
|
| 図2 超音波センサの構成 |
|
| 図3 超音波波形とタイミング |
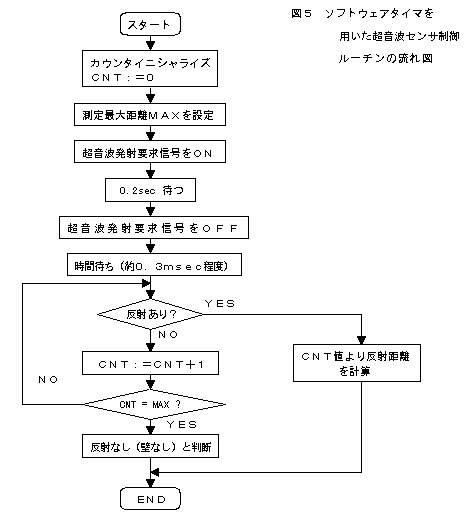
また、反射時間を測定するために図 3 のようなハードウェアタイマを用いず、マイクロコンピューターのソフトウェアでタイマを構成することも出来る。 しかし、超音波センサでは 1 [μs] を 0.17 [mm] に換算する。したがって、ソフトウェアタイマの 1 回のループに用する時間を 10 [μs] とすると、CPU はこの間他の処理ができない。ハードウェアタイマを用いれば、その間も他の処理を行うことができる。 図 5 はソフトウェアタイマを用いた場合の超音波センサ制御ルーチンの流れ図である。
|
| 図4 流れ図 |
一定時間内に反射波を受信できない場合カウンタはアンダーフロー信号を出す。 また、超音波を発射した後待ち時間をおいているのは、超音波の回折による回り込み波が受信回路に入って受信波を検出したように誤動作してしまうのをふせぐためである。
4. 超音波スピーカと超音波マイクロホン
電気信号を超音波に変えて空気中に発射する超音波スピーカ(送波器)と空気中を飛んできた超音波を受けてそれを電気信号に変換する超音波マイクロホン(受波器)を合わせて超音波トランジューサという。音は空気の振動であるから超音波トランジューサ波電気信号を機械的振動に変えたり、その逆の役割も果たす。
これらの電気振動変換素子は原理的には一つの素子が送波器にも受波器にも働くが送波と受波では空気の振動振幅にも大幅に異なり、しかもインピーダンスを変えたほうが効率がよいので別個のトランジューサを利用するのが通常である。
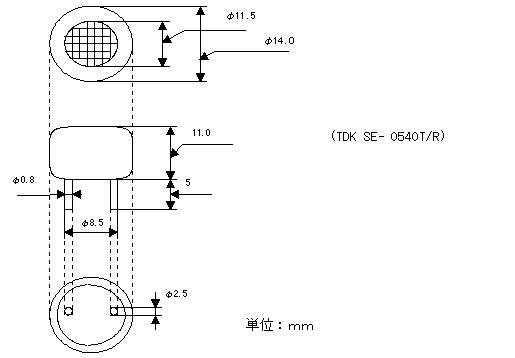
|
| 図6 超音波トランジューサ |
5. 超音波の指向制と反射特性
超音波は、トランジューサから一定の広がりを持ってビーム状に発射される、そのビームの形状を超音波トランジューサの指向性と言う。 MIRSで使用する超音波トランジューサの指向性は、それ程鋭くなく、50°程度(半減全角)の広がりを持つ。音の広がりを防ぐため、ホーンを取り付けることによって指向性が改善され、計測精度の向上につながる。 ホーンには指向性を鋭くすると同時に、中心方向のゲインをかせぐという利点がある。ただし、ホーンアンテナの設計を理論的に行なうことは難しいので、ある程度の試行錯誤によってホーンの形を決める必要がある。
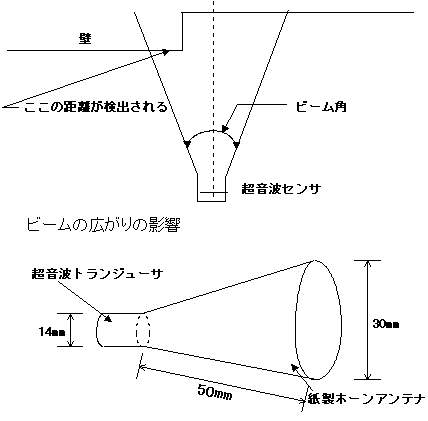
|
| 図8-1 紙性ホーンアンテナの例 |
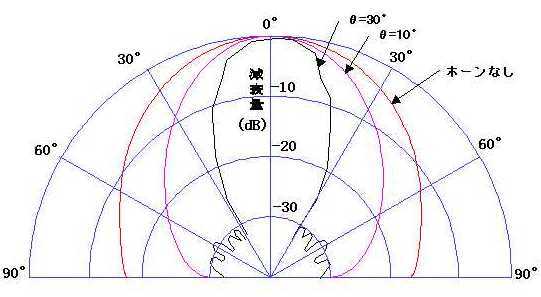
|
| 図8-2 超音波の指向性 |
超音波のような波が対象物に当たった場合、対象物が凹凸のある表面を持っていたとするならば、超音波は散乱しあらゆる方向に反射波が進んでいく。しかし鏡面を持っていたとすると入射角と反射角の関係から反射波は反射角の方向にしか観測されない。
このため、円筒のポールは探知が難しいと思われる。
超音波にとってどの程度までが散乱面なのかは波長 λ から知ることが出来る。以下にその関係式を示す。
ここで音速を340m/s、周波数を 40 KHz として波長 λ を求める。
以上の結果により、対象物の凹凸が約 8.5 [mm] 以上の場合には散乱面とみなされる。
6. 超音波センサ利用上の注意
- 壁にたいして斜めに入射した超音波はほとんどもどってこない。
- 超音波トランジューサは、周波数選択性が著しいので、送波回路に発信機を用いる時は周波数調整を綿密に行う。経時変化や温度変化による発信機のドリフト < 注 1 > にも注意が必要。
- 受信機は、大きな増幅率をかせぐアナログ回路であり、回路の雑音に注意。
- 受信機はマイクロホンであるから、外部の音やシステム自体の機械的振動で誤動作する恐れがある。受信機はゴム等を用いて、機械的振動が伝わらないように取り付ける。
- 外部からの音響的な雑音に対しては、距離を 2 回測定して、その値が違っていたら再度センサを働かせるというようなソフトウェアによる対策が有効。
- 続けて距離を測定する場合は、以前に発射した超音波に対する反射や残響が十分に減衰する時間(数 [ns] )をおいてから、次の超音波を発射する。
<注1>ドリフト
- 直接結合増幅回路は直流信号まで増幅できる。それゆえ、温度や電源電圧の変化によって ICBO や VBE 等が変化し、コレクタ電流が変化した場合、これを信号直流分と区別できない。入力の変動に原因せずに、電流が変動する現象をドリフトと呼ぶ。
7. その他
| 構造 | 送信・受信専用 (R:受信用 S:送信用) |
| 品名 | MA40B5R/S |
| 特徴 | 凡用・広帯域 |
| 公称周波数/TD> | 40kHz |
| 感度 | -47dB以上 |
| 音圧 | 112dB以上 |
| 指向性(半域全角) | 50° |
| 静電容量 | 2000pF |
| 分解能 | 9 |
| 検知距離 | 0.2~6.0m |
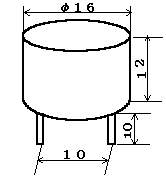
|
| 図10 MA40B5R/S |