
| 徖捗崅愱 揹巕惂屼岺妛壢 | |||||||
|
|||||||
| 夵掶婰榐 | |||||||
|---|---|---|---|---|---|---|---|
| 斉悢 | 嶌惉擔 | 嶌惉幰 | 彸擣 | 夵掶撪梕 | |||
| A01 | H11.11.09 | 孠柤丄榓揷 | 丂 | 弶斉 | |||
| A02 | H11.11.18 | 孠柤 | 丂 | 傾僯儊乕僔儑儞丄慄昞偺捛壛丅恾傪慡柺峏怴丅嵶晹傪峏怴 | |||
杮暥彂偼丄俵俬俼俽9904偵偍偗傞嶌嬈偵偮偄偰丄偦偺峴掱偲撪梕傪傑偲傔偨傕偺偱偁傞丅
丒奜娤僀儊乕僕
倖倢倗侾奜娤恾
仠丗愒奜慄僙儞僒
仭丗挻壒攇僙儞僒
朹丗僞僢僠僙儞僒
丒摦嶌偺奣梫
倖倢倗俀丂慗堏恾
慗堏忦審
| 嘆幚嫍棧90cm埲壓偺挻壒攇偺専弌偑偁偭偨丅 | 嘇億僗僩偺嵗昗偑婰壇偟偰偄傞嵗昗偲堦抳偡傞 |
| 嘊億僗僩偺嵗昗偑婰壇偟偰偄傞嵗昗偲堦抳偟側偄 | 嘋僞僢僠僙儞僒偺斀墳偑偁偭偨 |
| 嘍愒奜慄偑専弌偝傟偨 | 嘐2廃偟偰傕愒奜慄偺専弌偑柍偄 |
| 嘑愒奜慄偑専弌偝傟側偔側偭偨 | 嘒廃夞塣摦傪巒傔偨嵗昗傑偱栠偭偨 |
| 嘓億僗僩傪慡晹妉摼偟偰偄側偄 | 嘔億僗僩傪慡晹妉摼偟偰偄傞 |
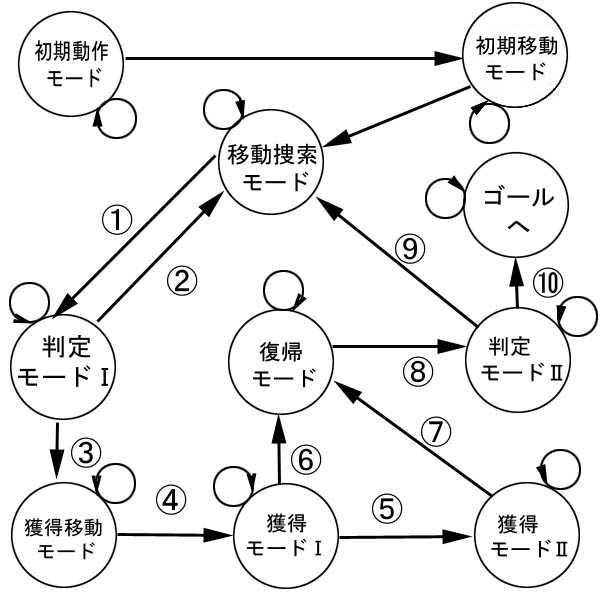
奺儌乕僪偵偮偄偰
弶婜摦嶌儌乕僪(嵗昗妋擣儌乕僪)
丂丂丂丂丂丂挻壒攇僙儞僒傪巐曽偵敪怣偟丄偦傟傪尦偵尰嵼埵抲偺嵗昗傪妱傝弌偡(嵗昗偼愨懳嵗昗)
弶婜堏摦儌乕僪丂丂丂丂丂丂
丂丂丂丂丂丂妱傝弌偝傟偨嵗昗傪尦偵X幉偺拞怱曽岦偵堏摦弌棃傞傛偆偵丄MIRS偺曽岦傪曄偊傞丅
堏摦 憑嶕儌乕僪
丂丂丂丂丂丂恾傪嶲徠丅
丂丂丂丂丂丂偙偺峴摦傪峴偆偲偒偵暻偲斀懳懁偺挻壒攇僙儞僒偱億僗僩傪憑嶕偡傞
敾掕儌乕僪嘥
丂丂丂丂丂丂億僗僩偑偁傞偲擣幆偟偨傜丄婰壇偟偨嵗昗傪尦偵偦偺億僗僩偑妉摼偡傞傋偒偐偟側偄傋偒偐敾掕
妉摼儌乕僪嘥
丂丂丂丂丂丂嘆億僗僩偺曽岦偵僞僢僠僙儞僒偑斀墳偡傞傑偱捈恑偡傞丅
丂丂丂丂丂丂嘇僞僢僠僙儞僒偑斀墳偟偨傜偦偺応偐傜MIRS偑MIRS偑夞揮偱偒傞嫍棧偩偗屻戅偡傞丅
丂丂丂丂丂丂嘊儘乕僞儕僄儞僐乕僟傪巊梡偟丄億僗僩偺夞傝傪MIRS偑偦偺応偱夞揮偱偒傞傎偳偺嫍棧傪巆偟偰廃夞塣摦傪偍偙側偆丅
妉摼儌乕僪嘦
丂丂丂丂丂丂嘆愒奜慄僙儞僒偵傛傝愒奜慄亖LED傪専弌偟偨傜MIRS偺岦偒傪LED偺曽岦偵夞揮偝偣傞丅
丂丂丂丂丂丂嘇僗僀僢僠偵岦偐偄僞僢僠僙儞僒偑斀墳偡傞傑偱捈恑偡傞丅
丂丂丂丂丂丂嘊僞僢僠僙儞僒偑斀墳偟偨傜愒奜慄僙儞僒偑愒奜慄傪専弌偱偒傞嫍棧傑偱屻戅偡傞丅
丂丂丂丂丂丂嘋愒奜慄偑専弌偝傟傞偺側傜偽嘇傑偱傕偳傞丅
暅婣儌乕僪
丂丂丂丂丂丂丂妉摼儌乕僪嘥偺帪偵恑傫偩曽岦偲摨偠曽岦偵廃夞塣摦傪偟丄廃夞塣摦傪巒傔偨応強傑偱栠傝丄暻偵岦偐偆丅
敾掕儌乕僪嘦
丂丂丂丂丂丂丂偡傋偰偺億僗僩傪妉摼偟偰偄傞偐敾抐
2夞栚偺杮慖偵偮偄偰
丂丂丂丂丂丂丂丂堦夞栚偺杮慖偱婰壇偟偨嵗昗傪尦偵暻偵増偭偰堏摦偡傞峴摦傪徣偒丄
丂丂丂丂丂丂丂丂億僗僩偐傜師偺億僗僩偵嵟抁嫍棧偱堏摦偱偒傞傛偆偵偡傞
慡懱偺戝傑偐側摦偒
| 墿怓 | MIRS丂愒偑偁傞偺偑惓柺偱偡丅 |
| 愒偄朹 | 挻壒攇 |
| 椢 | LED |
俥俴俙俽俫偑巊偊側偄恖偼
MPEG傪梡堄偟傑偟偨偺偱DL偟偰偔偩偝偄丅(4.5M)
3 僔僗僥儉愝寁曽恓
| 僐乕僪斣崋 | 嶌嬈柤徧 | 嶌嬈奣梫 | 惉壥暔柤徧 |
| 01-01-01 | 愒奜慄僙儞僒偺挷嵏 | MIRS偱巊梡偡傞愒奜慄僙儞僒偵偮偄偰挷嵏偡傞丅 | 挷嵏寢壥 |
| 01-01-02 | 挻壒攇僙儞僒偺挷嵏 | MIRS偱巊梡偡傞挻壒攇僙儞僒偵偮偄偰挷嵏偡傞丅 | 挷嵏寢壥 |
| 01-01-03 | 僞僢僠僙儞僒偺挷嵏 | MIRS偱巊梡偡傞僞僢僠僙儞僒偵偮偄偰挷嵏偡傞丅 | 挷嵏寢壥 |
| 01-01-04 | 儘乕僞儕乕僄儞僐乕僟偺挷嵏 | MIRS偱巊梡偡傞儘乕僞儕乕僄儞僐乕僟偵偮偄偰挷嵏偡傞丅 | 挷嵏寢壥 |
| 01-01-05 | PWM偺挷嵏 | MIRS偱巊梡偡傞PWM偵偮偄偰挷嵏偡傞丅 | 挷嵏寢壥 |
| 01-01-06 | I/Osub儃乕僪偺挷嵏 | MIRS偱巊梡偡傞I/Osub儃乕僪偵偮偄偰挷嵏偡傞丅 | 挷嵏寢壥 |
| 01-01-07 | I/O儃乕僪偺挷嵏 | MIRS偱巊梡偡傞I/O儃乕僪偵偮偄偰挷嵏偡傞丅 | 挷嵏寢壥 |
| 01-01-08 | VME儔僢僋偺挷嵏 | MIRS偱巊梡偡傞VME儔僢僋偵偮偄偰挷嵏偡傞丅 | 挷嵏寢壥 |
| 01-01-09 | CPU儃乕僪偺挷嵏 | MIRS偱巊梡偡傞CPU儃乕僪偵偮偄偰挷嵏偡傞丅 | 挷嵏寢壥 |
| 01-01-10 | 僜僼僩僂僃傾偺挷嵏 | MIRS偱巊梡偡傞僜僼僩僂僃傾偵偮偄偰挷嵏偡傞丅 | 挷嵏寢壥 |
| 01-01-11 | MPU僀儞僞乕僼僃乕僗偺挷嵏 | MIRS偱巊梡偡傞MPU僀儞僞乕僼僃乕僗偵偮偄偰挷嵏偡傞丅 | 挷嵏寢壥 |
| 01-01-20 | 僔僗僥儉埬嶌惉 | MIRS嫞媄偵嶲壛偡傞僔僗僥儉傪採埬偡傞丅 | 僔僗僥儉埬 |
| 01-01-21 | 僔僗僥儉暘愅 | MIRS9904偺僔僗僥儉傪暘愅偡傞丅 | 暘愅寢壥 |
| 01-02-01 | 僔僗僥儉寁夋彂嶌惉 | MIRS9904偺僔僗僥儉奐敪寁夋彂傪嶌惉偡傞丅 | 僔僗僥儉寁夋彂 |
| 02-01-01 | 僔僗僥儉婎杮婡擻偺専摙 | MIRS9904僔僗僥儉偺婎杮婡擻傪専摙偡傞丅 | 専摙寢壥 |
| 02-01-02 | 憱峴惂屼偺幚尰偵娭偡傞専摙 | MIRS9904僔僗僥儉偺憱峴惂屼幚尰偺偨傔偺専摙傪偡傞丅 | 専摙寢壥 |
| 02-02-01 | 儊僇僯僋僗婎杮愝寁専摙 | 儊僇僯僋僗晹偺婎杮愝寁偵偮偄偰専摙偡傞丅 | 儊僇僯僋僗婎杮愝寁 |
| 02-02-02 | 儊僇僯僋僗婎杮愝寁彂嶌惉 | 儊僇僯僋僗晹偺婎杮愝寁彂傪嶌惉偡傞丅 | 儊僇僯僋僗婎杮愝寁 |
| 02-02-03 | 僄儗僋僩儘僯僋僗婎杮愝寁専摙 | 僄儗僋僩儘僯僋僗晹偺婎杮愝寁偵偮偄偰専摙偡傞丅 | 僄儗僋僩僯僋僗婎杮愝寁 |
| 02-02-04 | 僄儗僋僩儘僯僋僗婎杮愝寁彂嶌惉 | 僄儗僋僩儘僯僋僗晹偺婎杮愝寁彂傪嶌惉偡傞丅 | 僄儗僋僩儘僯僋僗婎杮愝寁彂 |
| 02-02-05 | 僜僼僩僂僃傾婎杮愝寁専摙 | 僜僼僩僂僃傾晹偺婎杮愝寁偵偮偄偰専摙偡傞丅 | 僜僼僩僂僃傾婎杮愝寁 |
| 02-02-06 | 僜僼僩僂僃傾婎杮愝寁彂嶌惉 | 僜僼僩僂僃傾晹偺婎杮愝寁彂傪嶌惉偡傞丅 | 僜僼僩僂僃傾婎杮愝寁彂 |
僠乕儉偺僔僗僥儉奐敪懱惂恾
| 扴摉 | 巵柤 |
| 僠乕儉儅僱乕僕儍 | 嶳嶈丂孭巙 |
| 僪僉儏儊儞僩儅僱乕僕儍 | 彫郪丂桰堦 |
| 仸婎杮揑偵偡傋偰偺 嶌嬈偵実傢傞丅 |
傾僘僴儞 |
| 孠柤丂椙榓 | |
| 彫椦丂椇夘 | |
| 媑愳丂壚姲 | |
| 庒悪丂偝偍傝 | |
| 搉绯丂桭婎 | |
| 榓揷丂捈姴 |
奐敪岺掱昞乮WBS恾偺僐乕僪斣崋,嶌嬈偺柤徧丄扴摉幰丄婜娫乯
| 僐乕僪斣崋 | 嶌嬈柤徧 | 扴摉幰 | 婜尷 |
| 01-01-01 | 愒奜慄僙儞僒偺挷嵏 | 傾僘僴儞R嶈 | H11,12,09 |
| 01-01-02 | 挻壒攇僙儞僒偺挷嵏 | 彫郪 | H11,12,09 |
| 01-01-03 | 僞僢僠僙儞僒偺挷嵏 | 孠柤 | H11,12,09 |
| 01-01-04 | 儘乕僞儕乕僄儞僐乕僟偺挷嵏 | 彫椦 | H11,12,09 |
| 01-01-05 | PWM偺挷嵏 | 媑愳 | H11,12,09 |
| 01-01-06 | I/Osub儃乕僪偺挷嵏 | 庒悪 | H11,12,09 |
| 01-01-07 | I/O儃乕僪偺挷嵏 | 搉绯 | H11,12,09 |
| 01-01-08 | VME儔僢僋偺挷嵏 | 榓揷 | H11,12,09 |
| 01-01-09 | CPU儃乕僪偺挷嵏 | 傾僘僴儞R嶈 | H11,12,14 |
| 01-01-10 | 僜僼僩僂僃傾偺挷嵏 | 彫郪 | H11,12,14 |
| 01-01-11 | MPU僀儞僞乕僼僃乕僗偺挷嵏 | 孠柤 | H11,12,14 |
| 01-01-20 | 僔僗僥儉埬嶌惉 | 彫椦 | H11,12,21 |
| 01-01-21 | 僔僗僥儉暘愅 | 媑愳 | H12,1,18 |
| 01-02-01 | 僔僗僥儉寁夋彂嶌惉 | 庒悪 | H11,1,20 |
| 02-01-01 | 僔僗僥儉婎杮婡擻偺専摙 | 傾僘僴儞R嶈 | H12,1,18 |
| 02-01-02 | 憱峴惂屼偺幚尰偵娭偡傞専摙 | 彫郪 | H12,1,18 |
| 02-02-01 | 儊僇僯僋僗婎杮愝寁専摙 | 榓揷 | H12,1,27 |
| 02-02-02 | 儊僇僯僋僗婎杮愝寁彂嶌惉 | 榓揷 | H12,02,01 |
| 02-02-03 | 僄儗僋僩儘僯僋僗婎杮愝寁専摙 | 搉绯 | H12,01,27 |
| 02-02-04 | 僄儗僋僩儘僯僋僗婎杮愝寁彂嶌惉 | 搉绯 | H12,02,01 |
| 02-02-05 | 僜僼僩僂僃傾婎杮愝寁専摙 | 孠柤 | H12,01,27 |
| 02-02-06 | 僜僼僩僂僃傾婎杮愝寁彂嶌惉 | 孠柤 | H12,02,10 |