沼津高専 電子制御工学科
MIRS9901標準MIRS規定走行試験手順書
MIRS9901-SOFT-0001
改訂記録
版数
作成日
作成者
承認
改訂内容
A01
2000/9/02
佐田
岩田
初版
A02
2000/9/15
佐田
岩田
超音波を使用
A03
2000/10/18
佐田
岩田
ロータリーエンコーダ使用
目次
走行試験規定
MIRS9901走行手順
ポストへ衝突
ポストに横向き
ポスト回転
ゴール領域へ
規定走行手順
1.ポストへ衝突
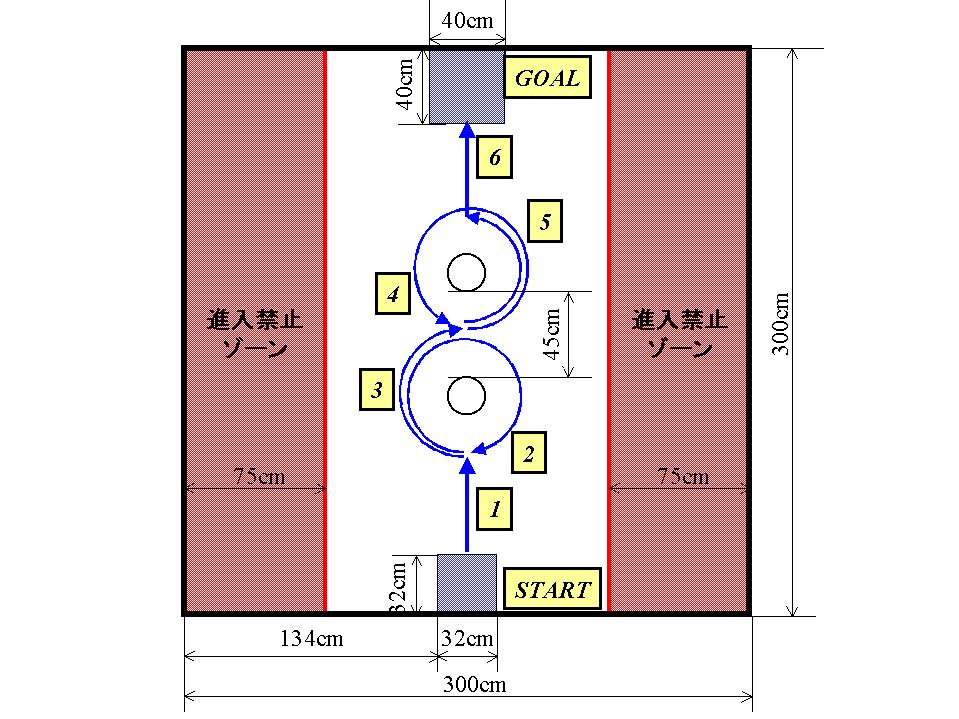
試験開始の合図でロボットから手を離し、ロボットは直進する。([1])
衝突してタッチセンサが反応するまでポスト1へ向かう。この時はPWMであらかじめ一定の値を指定しておく.([1])
超音波センサ等は使用せずタッチセンサの割り込みのみを受け付けておく。([1])
この動作はポスト2、ゴール付近の壁へ向かう時にも行う。([3],[6])
タッチセンサに反応があったら衝突回数をカウントし、一定距離バックする。([1])
バックする量はあらかじめPWMと、タイマで決めておく.([1])
2.ポストに横向き
バックした後、ポストに横向きになる為にその場回転を行う。([1])
MIRS左側面の超音波を出しながら回転する。([1])
超音波の値がある一定距離内になった時、停止してポストを回転し始める。([1]〜[2])
ポスト2に横を向くときにポスト1を誤って感知しないようにその場回転の 範囲を前面180°に限定しておく。([3]〜[4])
3.ポスト回転
ポストに横を向いた後、ある一定のduty比に従って、ポストを回転する。([2],[4])
この時、MIRS左側面の超音波を出し、ポストとの距離によってduty比 を上下し、回転のずれを調整する.([2],[4])
また左超音波と交互にMIRS前面の超音波を出し、ポスト2(or壁)を発見する。([3],[5])
ロータリーエンコーダで1周半回ったことを確認した後、ポスト2(or壁) へと向かう([3],[5])
4.ゴール領域へ
上記に示した方法でポスト1、ポスト2を回り壁に衝突して、横向きになる.([1],[3])
タッチセンサの回数をカウントしておき、3度目であることを確認する。([6])
前面超音波を出し壁との距離を測り、ゴール領域まで前後する.([6])
この時、左超音波を一定間隔で出し、常に壁に真横を向く.([6])
図1 規定走行試験コース