| 名称 | MIRS2501 エレクトロニクス詳細設計 |
|---|---|
| 番号 | MIRS2501-ELEC-0001 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2026.01.30 | テテー | 初版 |
本ドキュメントは、Babloonの詳細設計およびエレクトロニクスに関するドキュメントである。
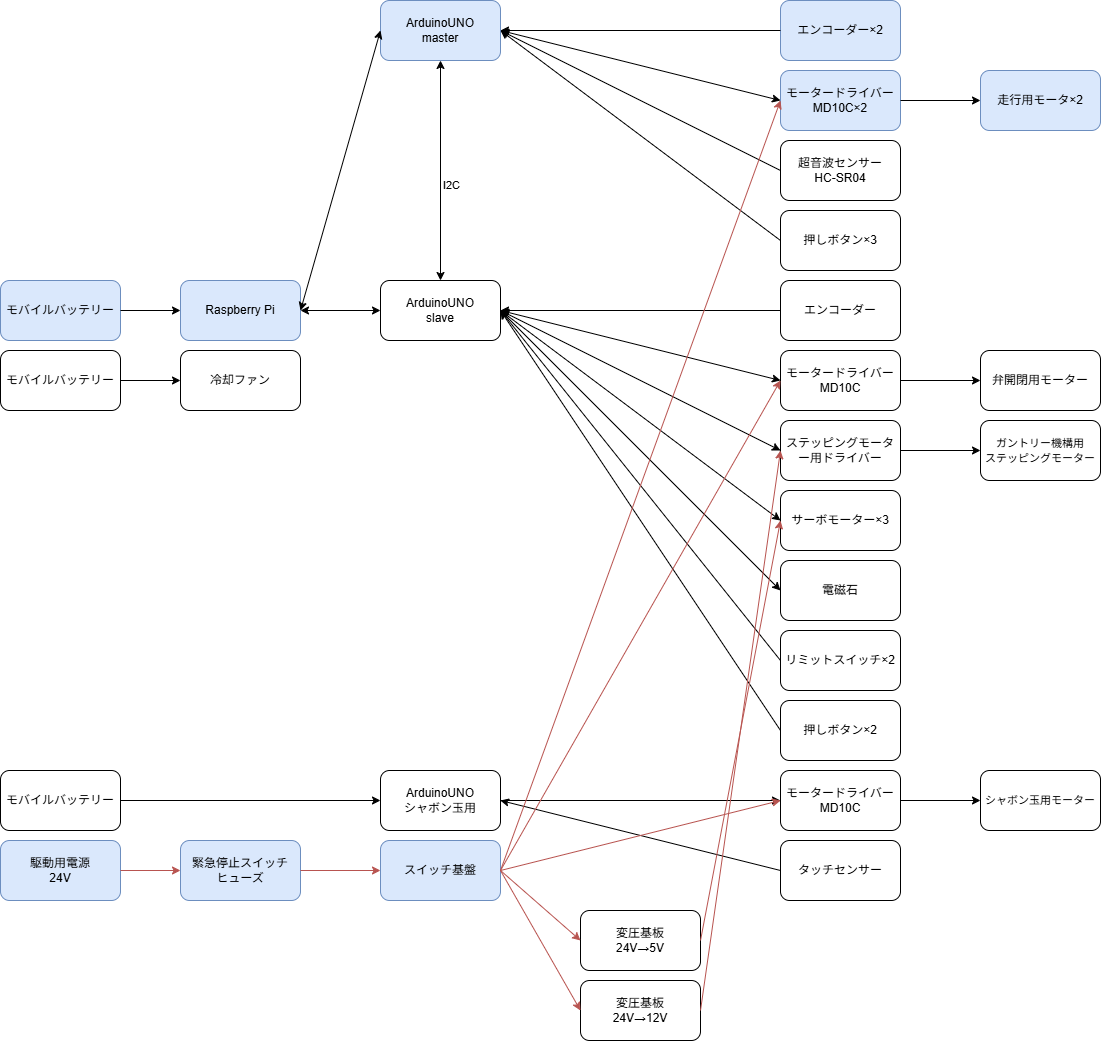
システム構成を図1に示す。
以下に、全体構成に使用されている各機器の配線図を示す。
標準機には、24V主電源バッテリ、ヒューズ、緊急停止スイッチ、電源基板が搭載されている。 これらの配線図を図2に示す。
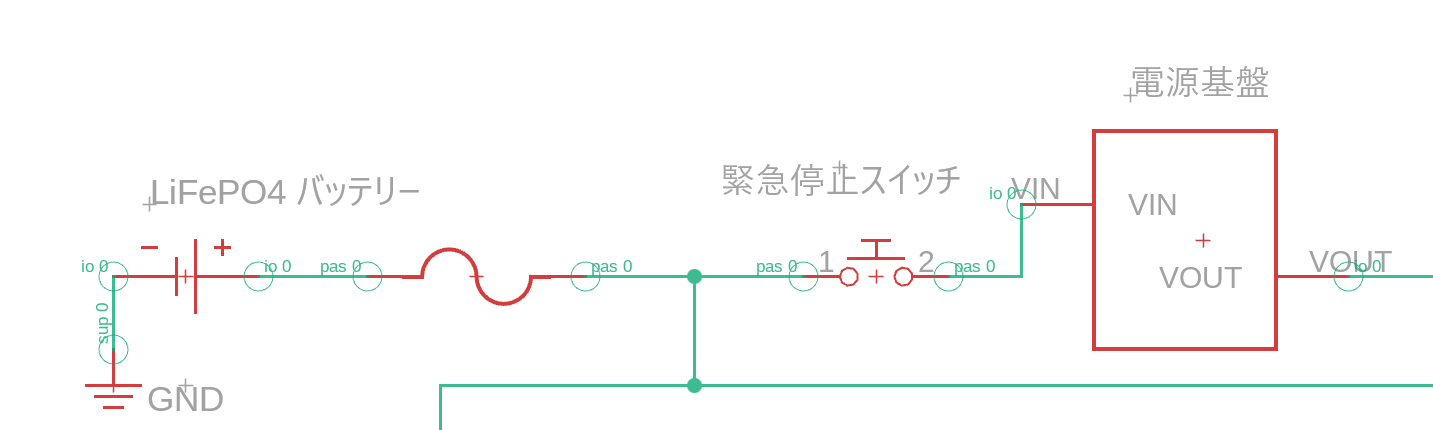
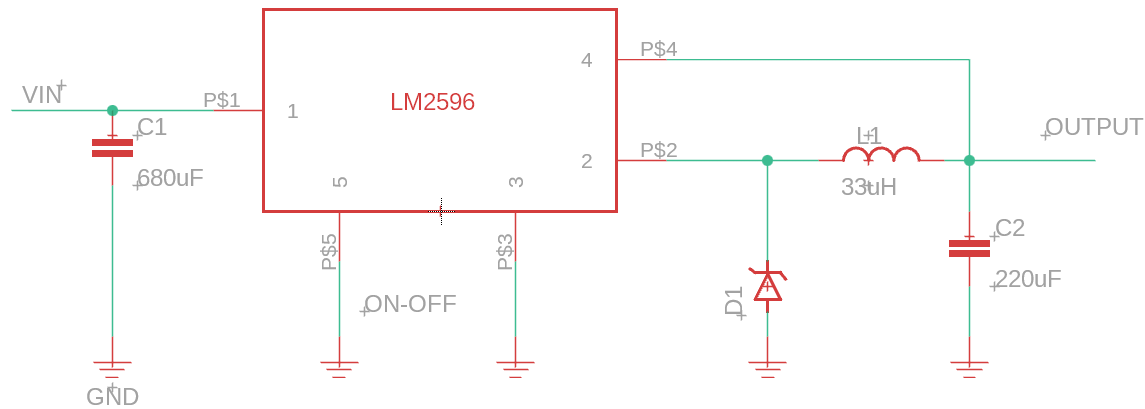
24V主電源バッテリより、バッテリモジュールを介して電圧を分岐し、システム各部へ電力を供給する。 LM2596Sの内部構成を図3に示す。
Raspberry Pi、Master Arduino、Slave Arduino間の接続および、超音波センサーの配線図を図4に示す。 ロボットの巡回モードボタンおよび風船モードボタンは、図4の右上に配置されている。 また、3つのマイコンのピン接続を、それぞれTable 1、Table 2、Table 3に示す。
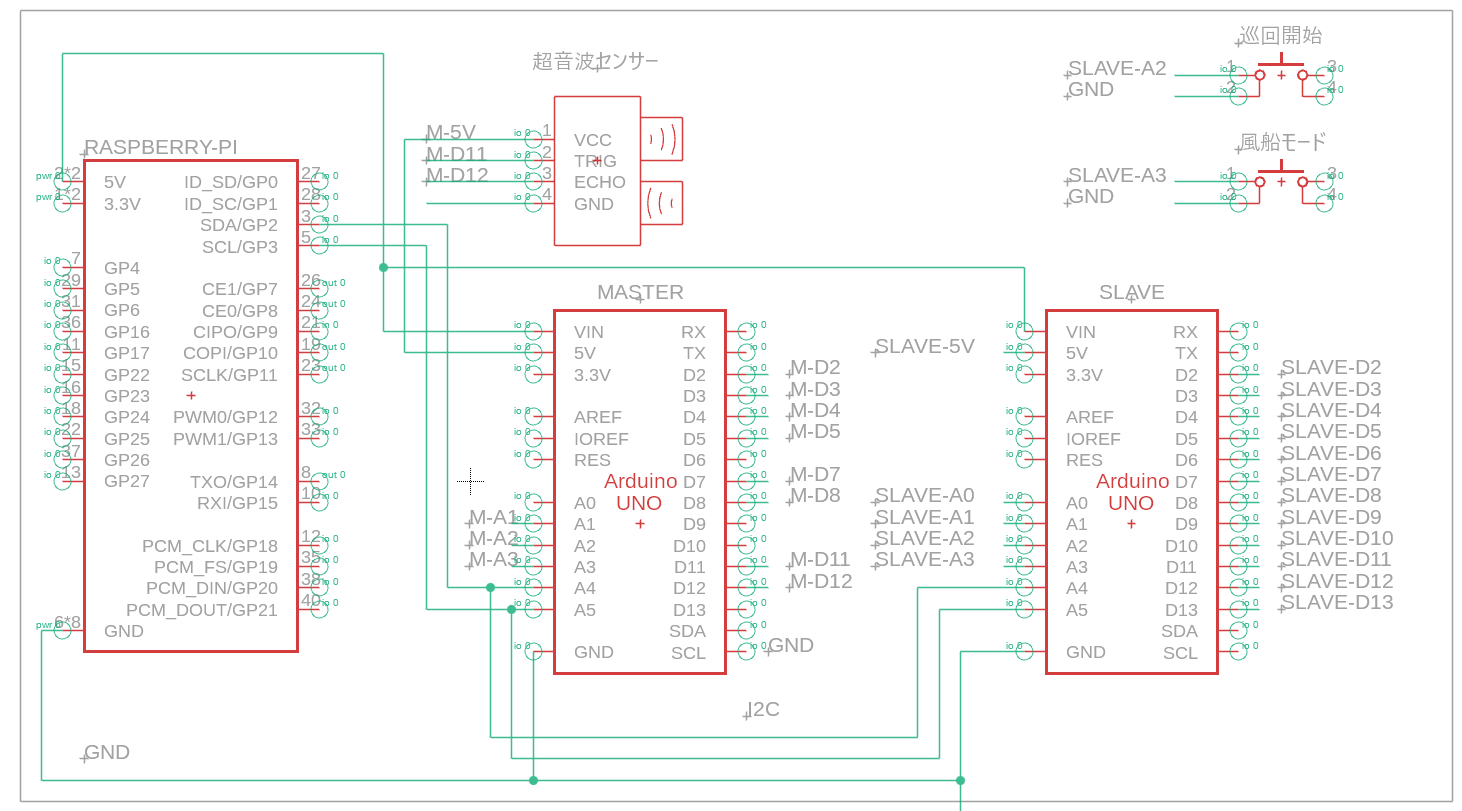
Table1 Raspberry Pi の接続デバイス
| ピン番号 | ピン配置 | 接続デバイス | IN/OUT |
|---|---|---|---|
| 2 | 5V | Arduino Master・Arduino Slave | OUT |
| 3 | GP2 | Arduino Master・Slave A4 | OUT/IN |
| 5 | GP3 | Arduino Master・Slave A5 | OUT/IN |
| 6 | GND | GND | - |
Table2 Arduino Master の接続デバイス
| ピン番号 | ピン配置 | 接続デバイス | IN/OUT |
|---|---|---|---|
| 0 | D0 | Serial RX(PC/RasPi通信) | IN |
| 1 | D1 | Serial TX(PC/RasPi通信) | OUT |
| 2 | D2 | 左エンコーダー A相 | IN |
| 3 | D3 | 右エンコーダー A相 | IN |
| 4 | D4 | 左エンコーダー B相 | IN |
| 5 | D5 | 超音波センサー Trig (HC-SR04) | OUT |
| 6 | D6 | 超音波センサー Echo (HC-SR04) | IN |
| 7 | D7 | 右エンコーダー B相 | IN |
| 8 | D8 | 右モーター DIR (回転方向) | OUT |
| 9 | D9 | 右モーター PWM (速度指令) | OUT |
| 10 | D10 | [未使用] (PWM出力可能) | - |
| 11 | D11 | 左モーター PWM (速度指令) | OUT |
| 12 | D12 | 左モーター DIR (回転方向) | OUT |
| 13 | D13 | 内蔵LED (Status) | OUT |
| 14 | A0 | バッテリー電圧監視 | IN |
| 15 | A1 | 操作ボタン 1 (風船選択1) | IN |
| 16 | A2 | 操作ボタン 2 (風船選択2) | IN |
| 17 | A3 | 操作ボタン 3 (風船選択3) | IN |
| 18 | A4 | I2C SDA (Slave通信) | OUT/IN |
| 19 | A5 | I2C SCL (Slave通信) | OUT/IN |
| 20 | Vin | - | IN |
| 21 | 5V | - | OUT |
| 22 | GND | GND | - |
Table3 Arduino Slave の接続デバイス
| ピン番号 | ピン配置 | 接続デバイス | IN/OUT |
|---|---|---|---|
| 0 | D0 | Serial RX (デバッグ用) | IN |
| 1 | D1 | Serial TX (デバッグ用) | OUT |
| 2 | D2 | ステッピング X軸 STEP | OUT |
| 3 | D3 | ステッピング Y軸 STEP | OUT |
| 4 | D4 | 電磁石 (ソレノイド) 制御 | OUT |
| 5 | D5 | ヘリウムバルブ PWM | OUT |
| 6 | D6 | ステッピング X軸 DIR | OUT |
| 7 | D7 | ステッピング Y軸 DIR | OUT |
| 8 | D8 | ヘリウムバルブ DIR | OUT |
| 9 | D9 | ステッピング X軸 リミットスイッチ | IN |
| 10 | D10 | ステッピング Y軸 リミットスイッチ | IN |
| 11 | D11 | サーボモータ 1 (風船1用) | OUT |
| 12 | D12 | サーボモータ 2 (風船2用) | OUT |
| 13 | D13 | サーボモータ 3 (風船3用) | OUT |
| 14 | A0 | ヘリウムバルブ エンコーダ A相 (PCINT) | IN |
| 15 | A1 | ヘリウムバルブ エンコーダ B相 (PCINT) | IN |
| 16 | A2 | 追加ボタン A (巡回開始) | IN |
| 17 | A3 | 追加ボタン B (風船モード移行) | IN |
| 18 | A4 | I2C SDA (Master通信) | IN/OUT |
| 19 | A5 | I2C SCL (Master通信) | IN/OUT |
| 20 | Vin | - | IN |
| 21 | 5V | - | OUT |
| 22 | GND | GND | - |
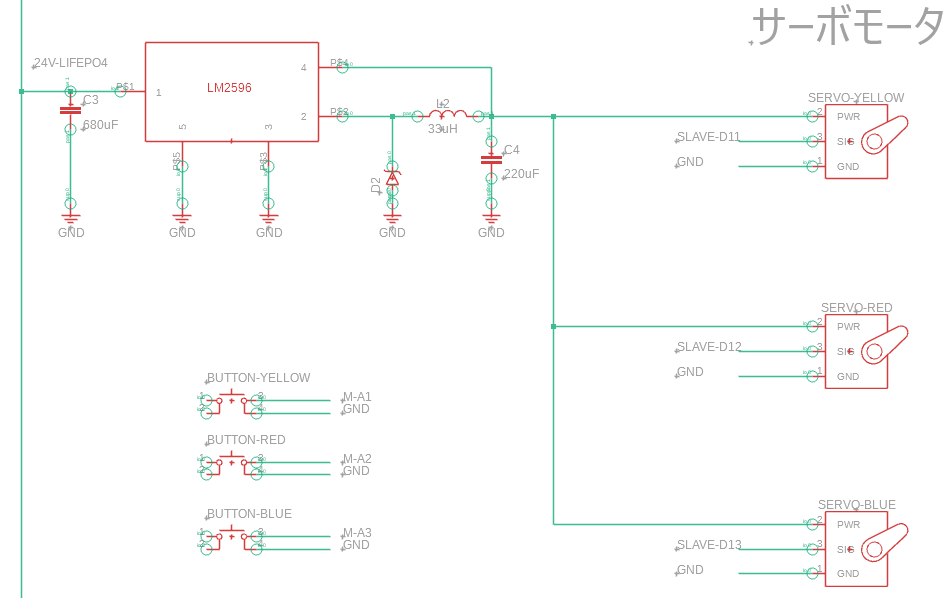
ストック機構に使用されている3つの風船ボタンおよび、電源モジュール付きの3つのサーボモータの配線図を図5に示す。
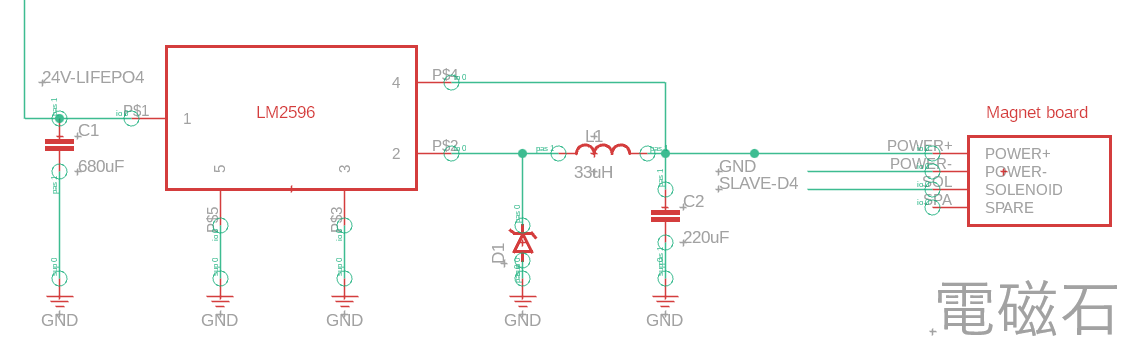
電源モジュール付き電磁石の配線図を図6に示す。
電源モジュールおよびCNCシールドの配線図を図7に示す。
また、X軸およびY軸のピン接続を、それぞれTable 4、Table 5に示す。
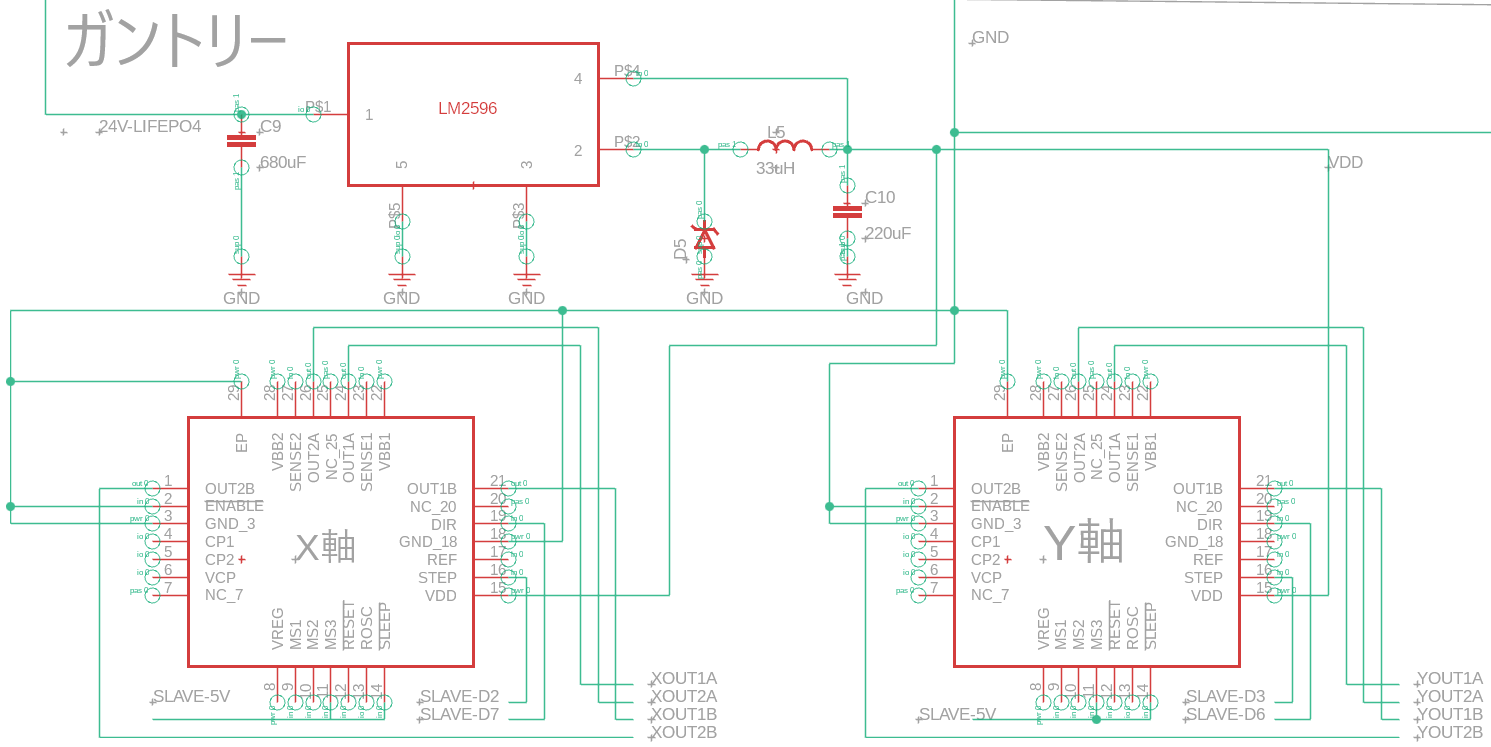
Table4 CNCシールドX軸の接続デバイス
| ピン番号 | ピン配置 | 接続デバイス | IN/OUT |
|---|---|---|---|
| 1 | OUT2B | X軸モータ B相(-) | OUT |
| 2 | ENABLE | 有効化信号 | IN |
| 3 | GND | GND | - |
| 11 | MS2 | マイクロステップ設定(通常5V入力) | IN |
| 14 | SLEEP | 入力5V | IN |
| 15 | VDD | 制御電源 | IN |
| 16 | STEP | ステップ信号 | IN |
| 18 | DIR | 基準電圧 (電流制限設定) | IN |
| 19 | DIR | 回転方向信号 | IN |
| 21 | OUT1B | X軸モータ B(+) | OUT |
| 24 | OUT1A | X軸モータ A (+) | OUT |
| 26 | OUT2A | X軸モータ A (-) | OUT |
| 29 | EP | GND | - |
Table5 CNCシールドY軸の接続デバイス
| ピン番号 | ピン配置 | 接続デバイス | IN/OUT |
|---|---|---|---|
| 1 | OUT2B | Y軸モータ B相(-) | OUT |
| 2 | ENABLE | 有効化信号 | IN |
| 3 | GND | GND | - |
| 11 | MS2 | マイクロステップ設定(通常5V入力) | IN |
| 14 | SLEEP | 入力5V | IN |
| 15 | VDD | 制御電源 | IN |
| 16 | STEP | ステップ信号 | IN |
| 18 | DIR | 基準電圧 (電流制限設定) | IN |
| 19 | DIR | 回転方向信号 | IN |
| 21 | OUT1B | Y軸モータ B(+) | OUT |
| 24 | OUT1A | Y軸モータ A (+) | OUT |
| 26 | OUT2A | Y軸モータ A (-) | OUT |
| 29 | EP | GND | - |
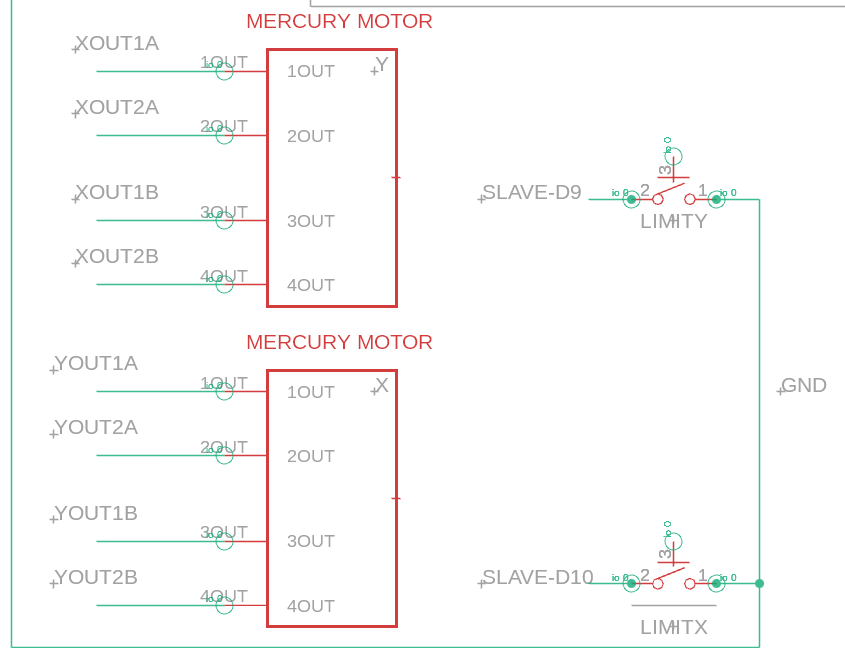
ガントリーに使用されているモータおよびリミットスイッチの配線図を図8に示す。
シャボン玉用Arduinoの配線図を図9に示す。 また、Arduinoのピン接続をTable 6に示す。
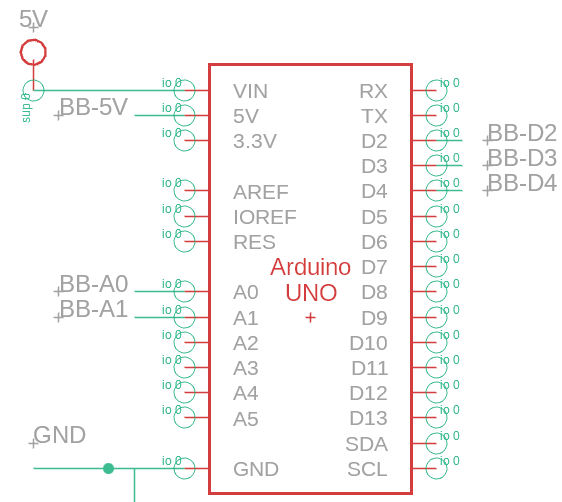
Table6 シャボン玉用Arduinoの接続デバイス
| ピン番号 | ピン配置 | 接続デバイス | IN/OUT |
|---|---|---|---|
| 2 | D2 | リミットスイッチ | IN |
| 3 | D3 | モータ速度 | OUT |
| 4 | D4 | モータ回転方向 | OUT |
| 14 | A0 | シャボン玉用モータ A相 | OUT |
| 15 | A1 | シャボン玉用モータ B相 | OUT |
| 20 | Vin | - | IN |
| 21 | 5V | - | OUT |
| 22 | GND | GND | - |
シャボン玉用モータおよび回収ボックスのリミットスイッチの配線図を図10に示す。

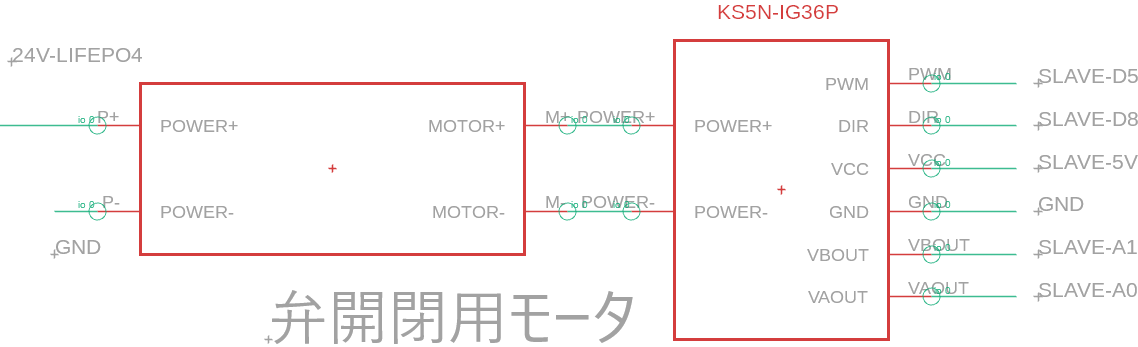
弁開閉用モータの配線図を図11に示す。
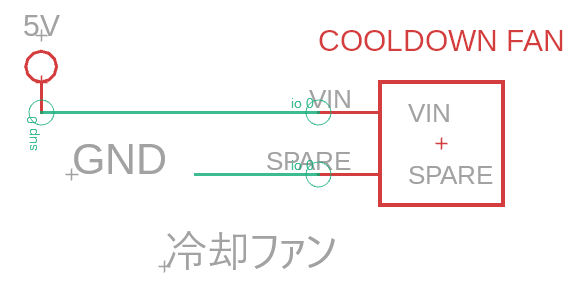
冷却ファンの回路図を図12に示す。