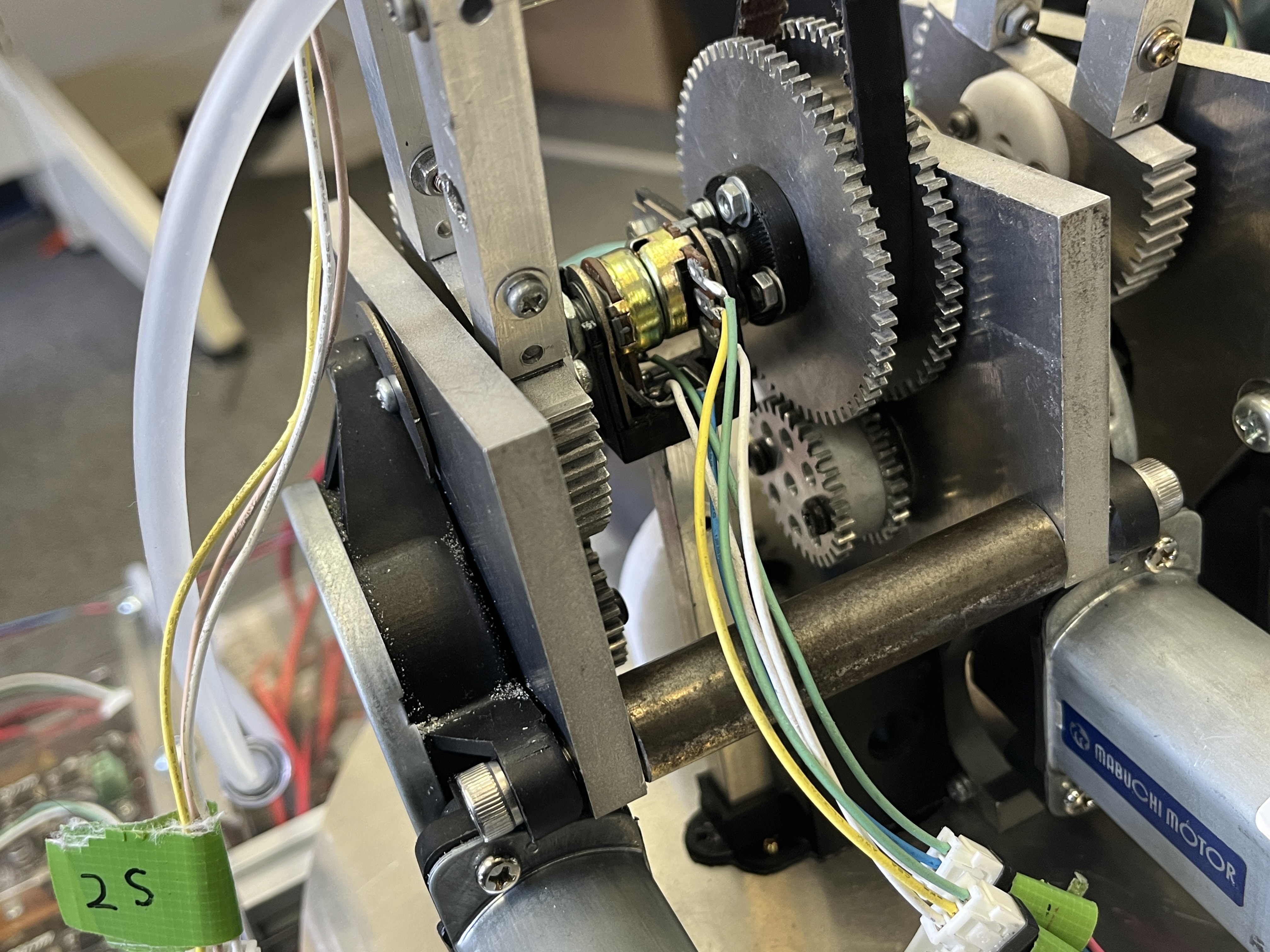
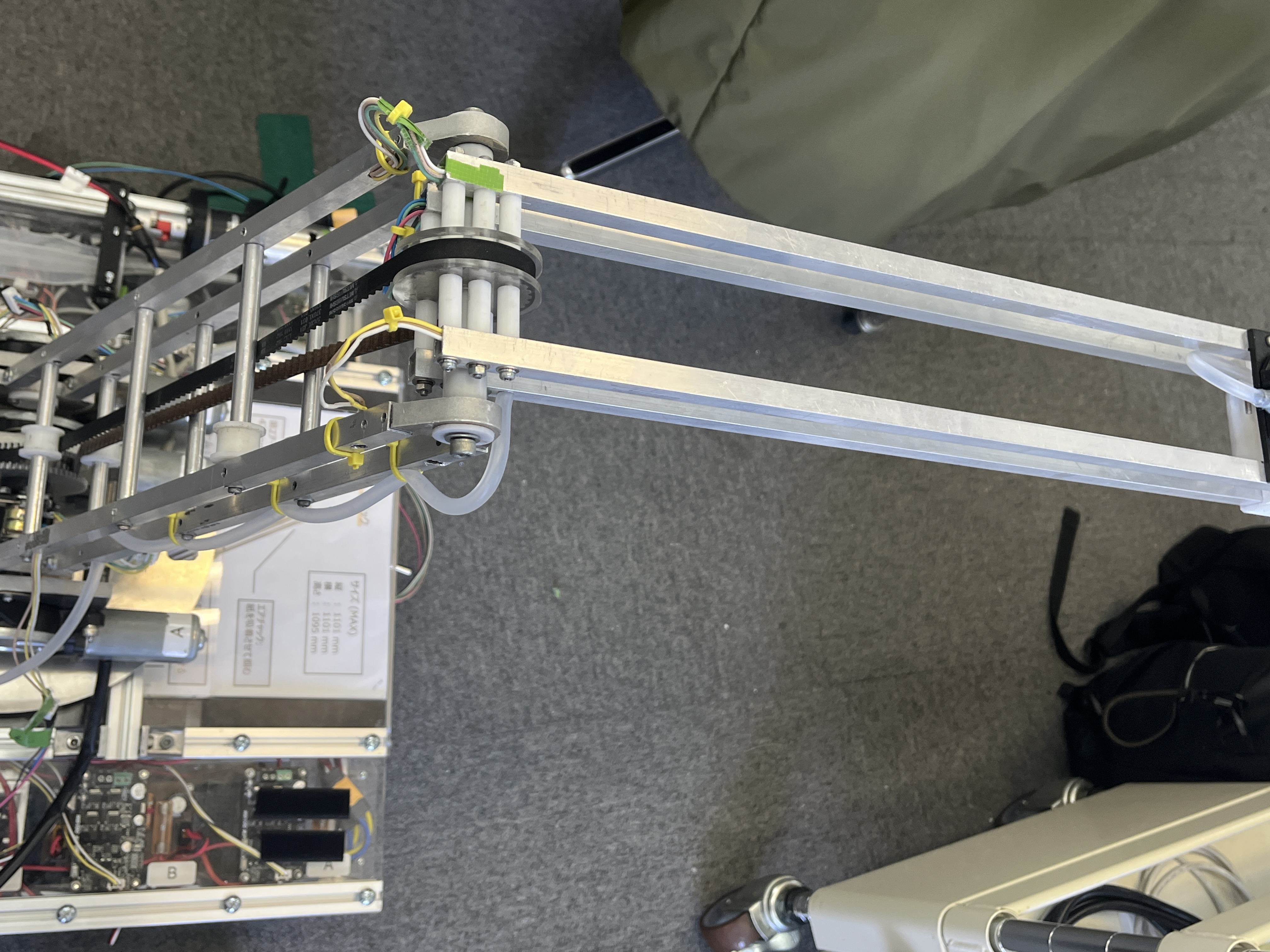
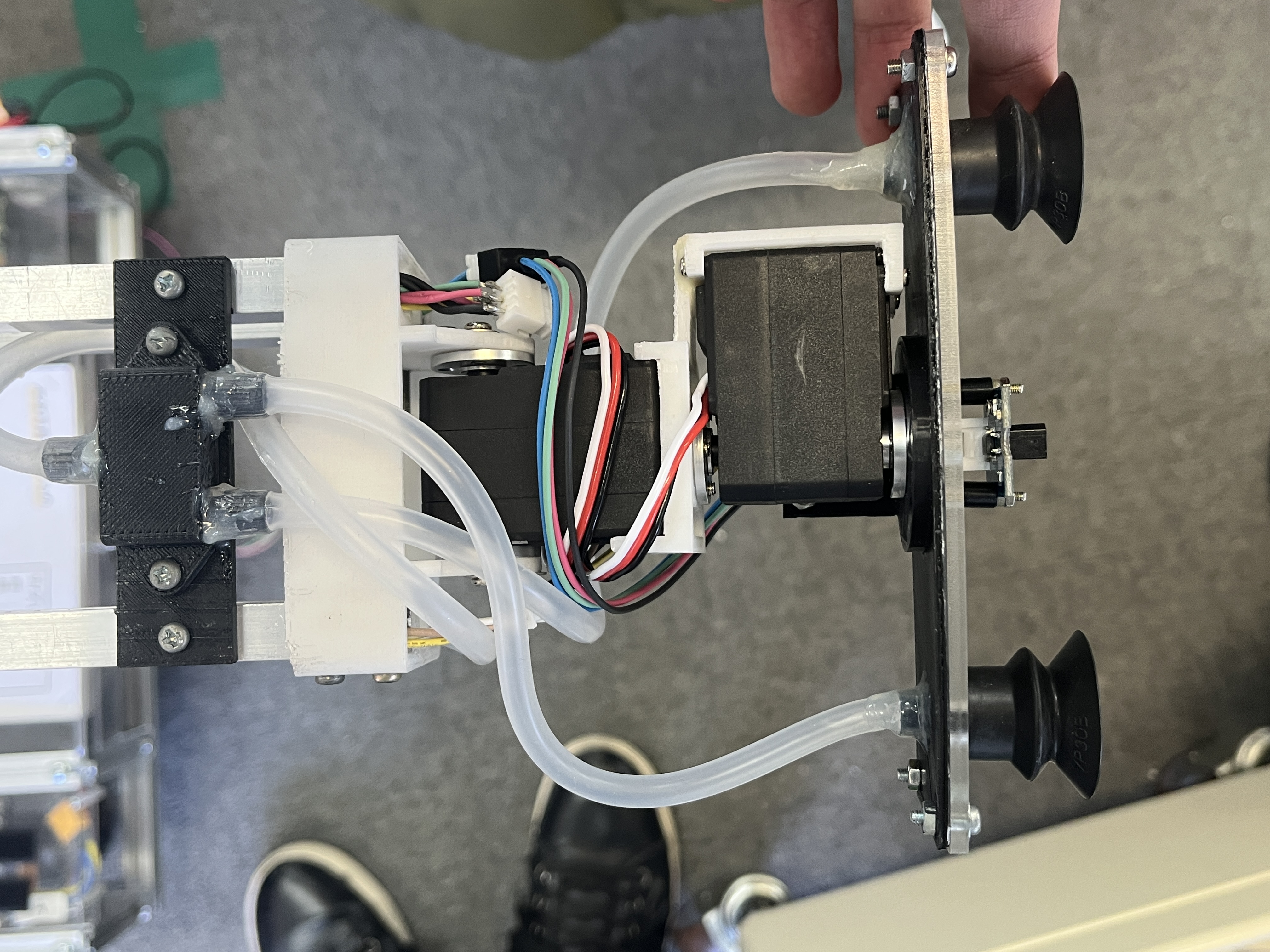
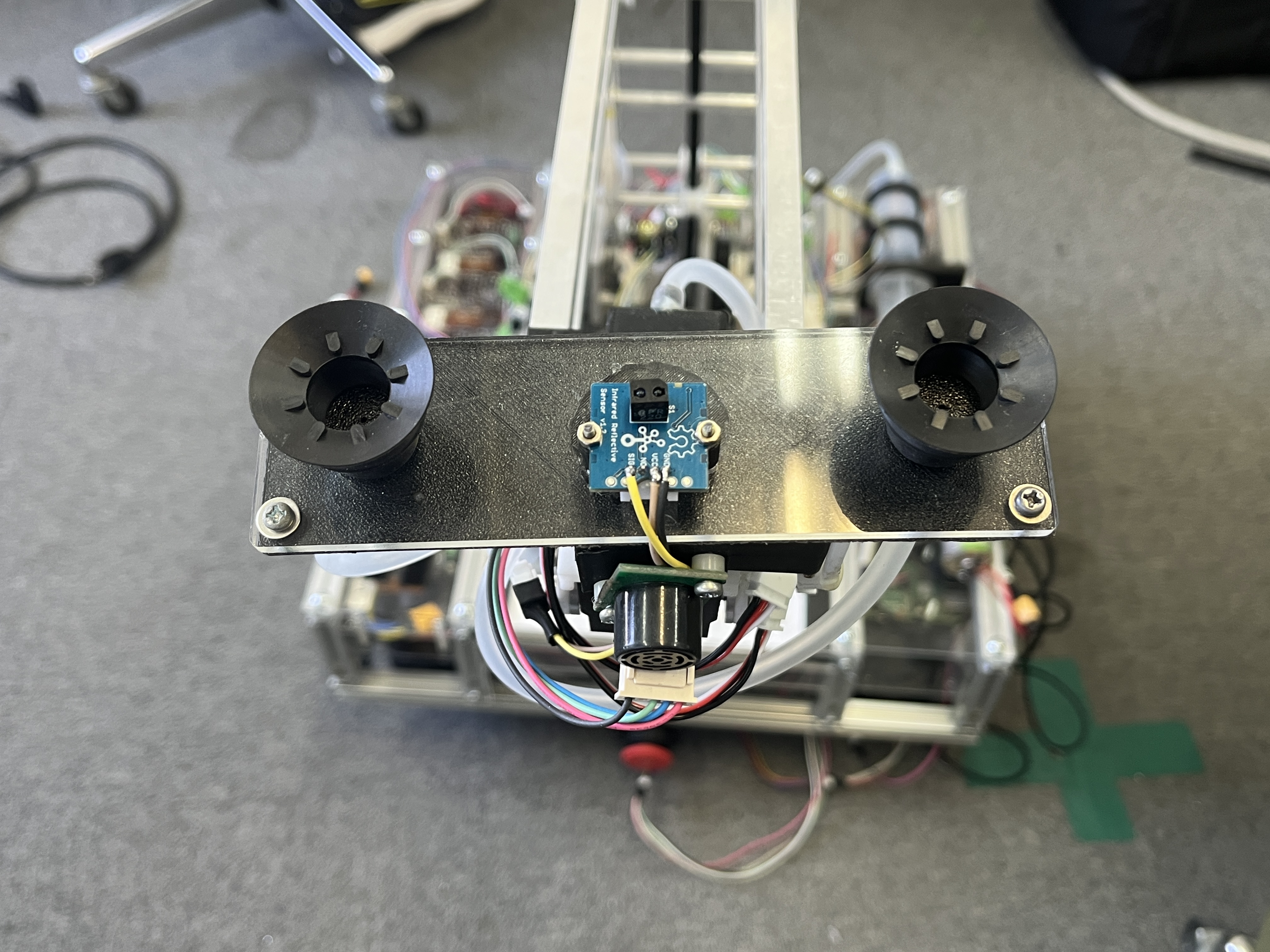
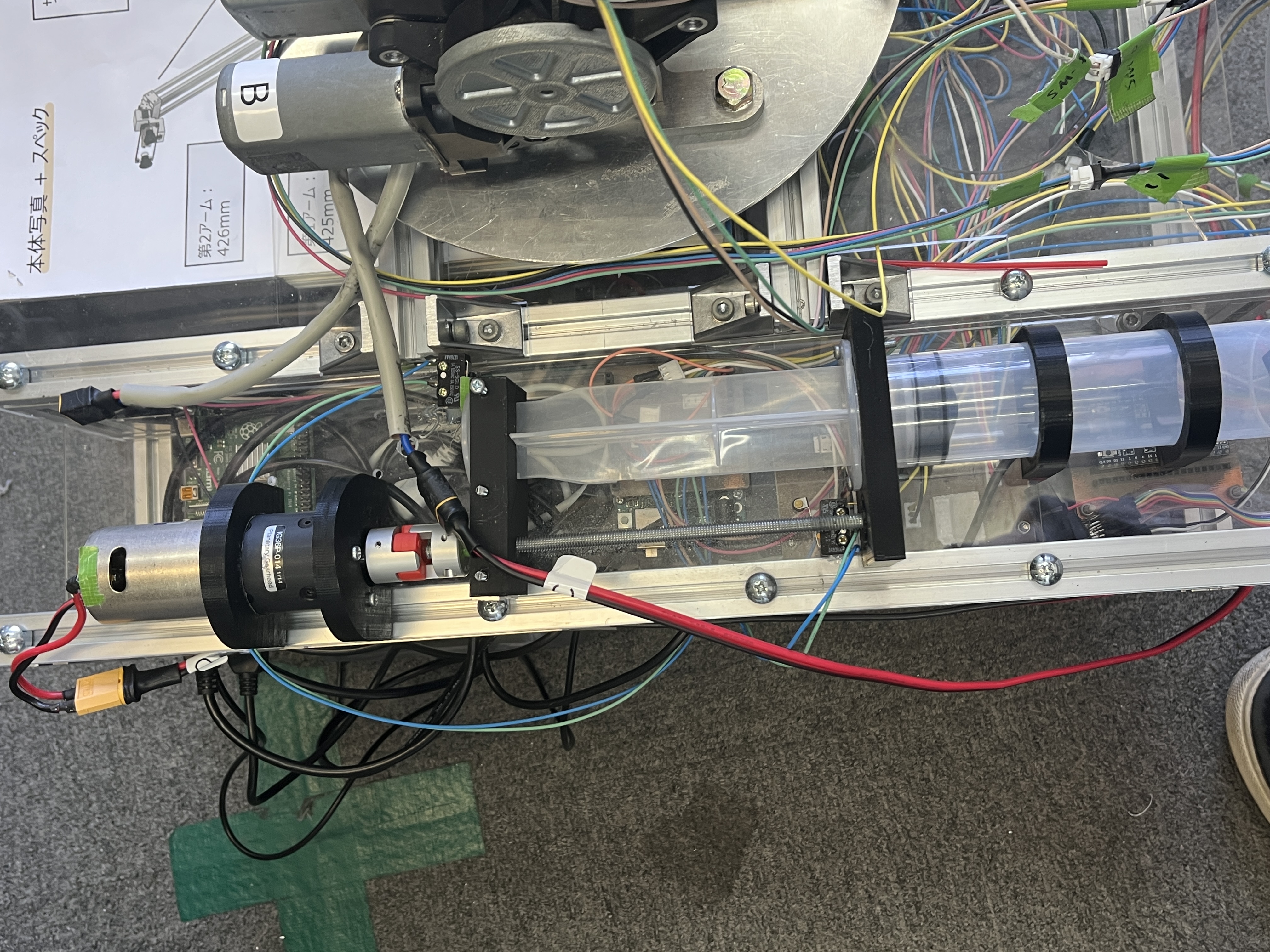
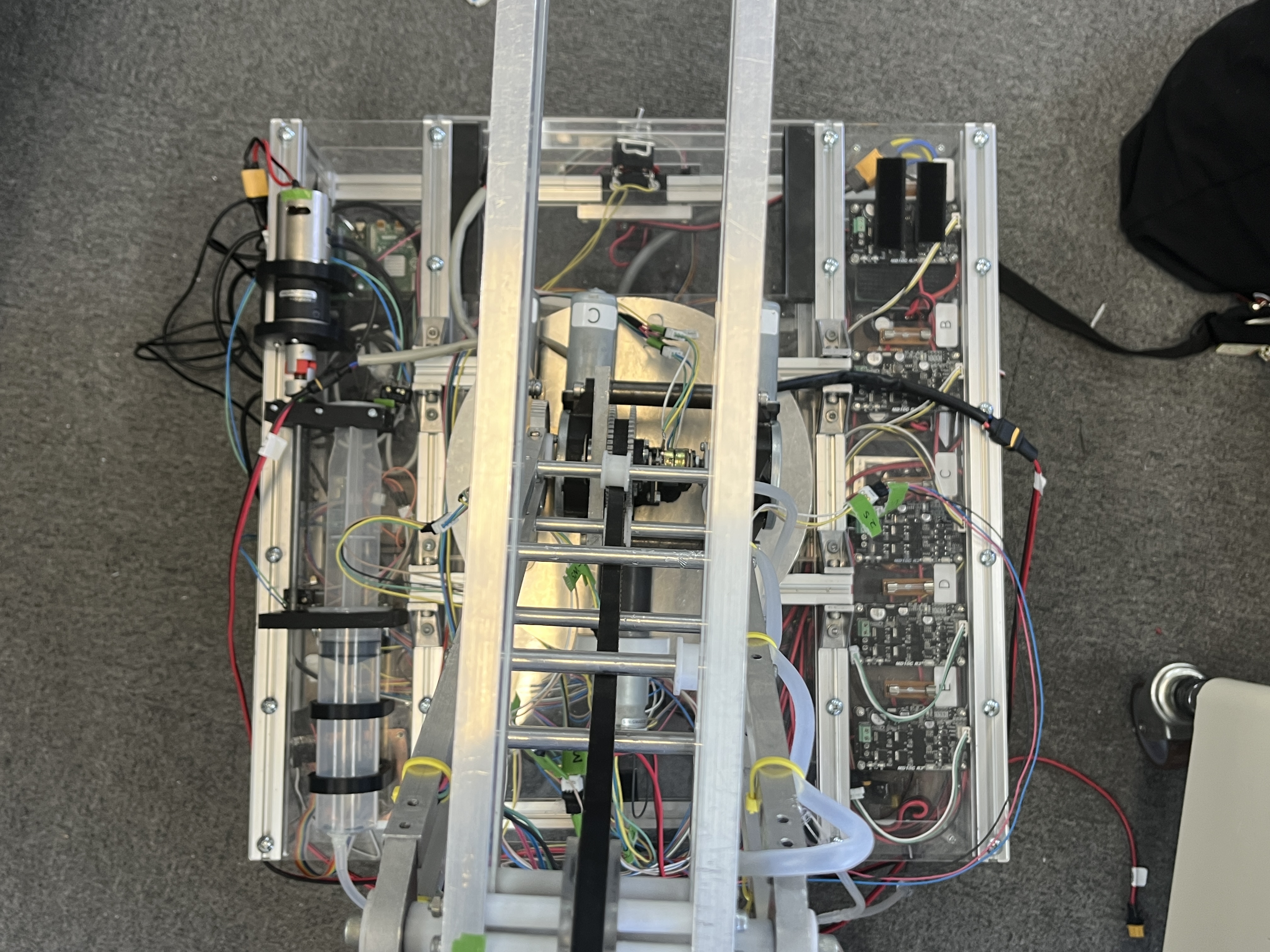
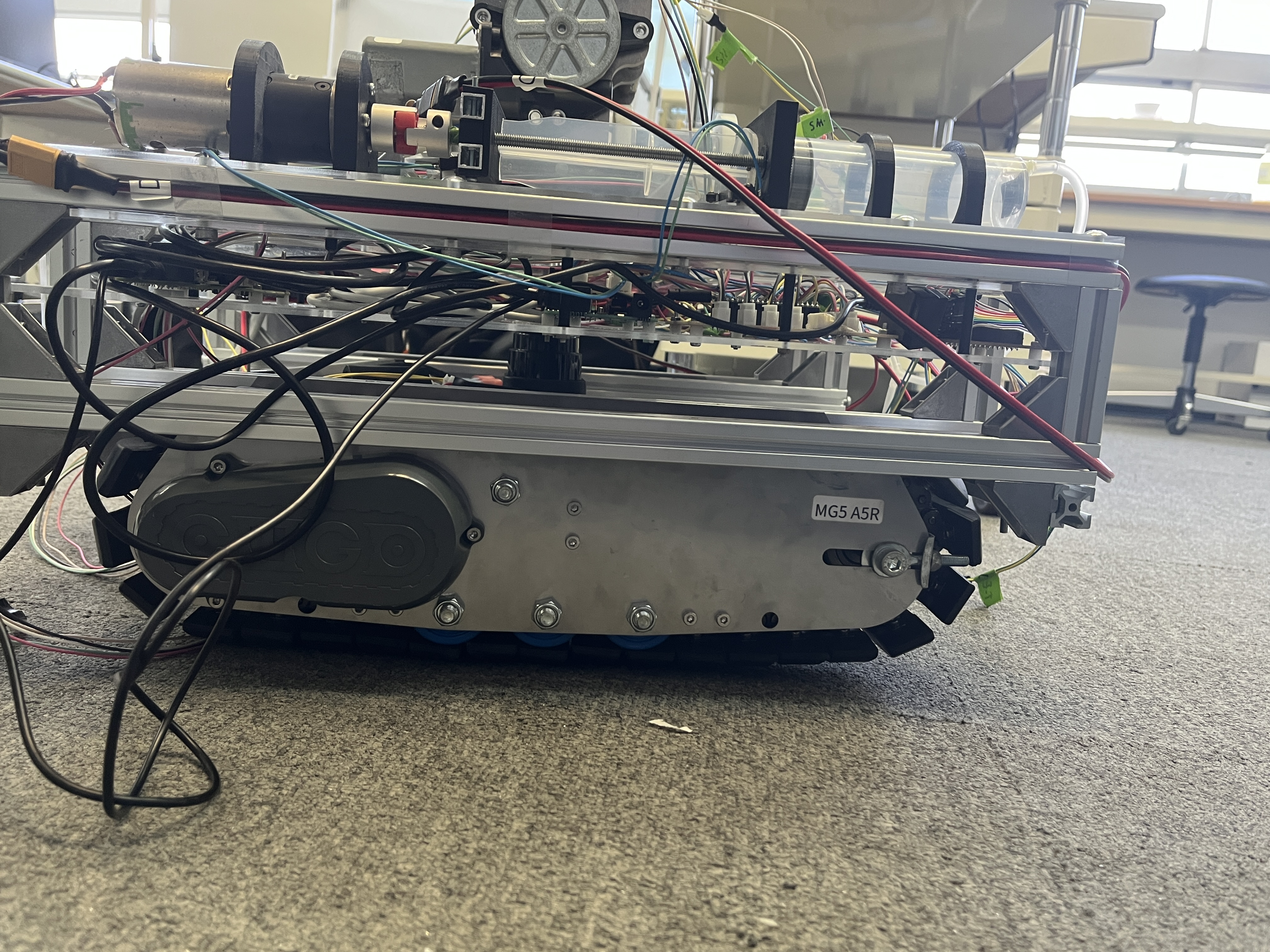
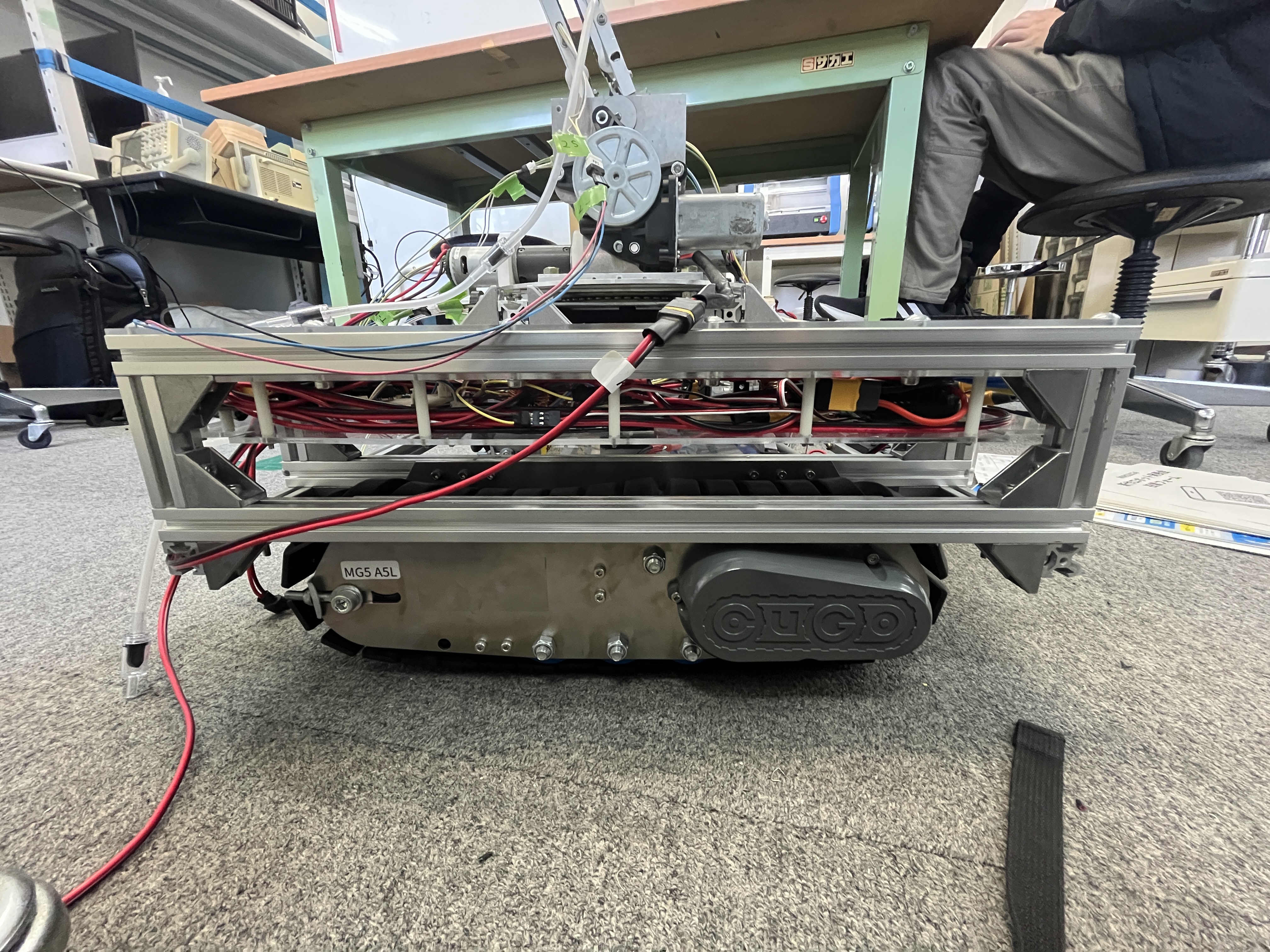
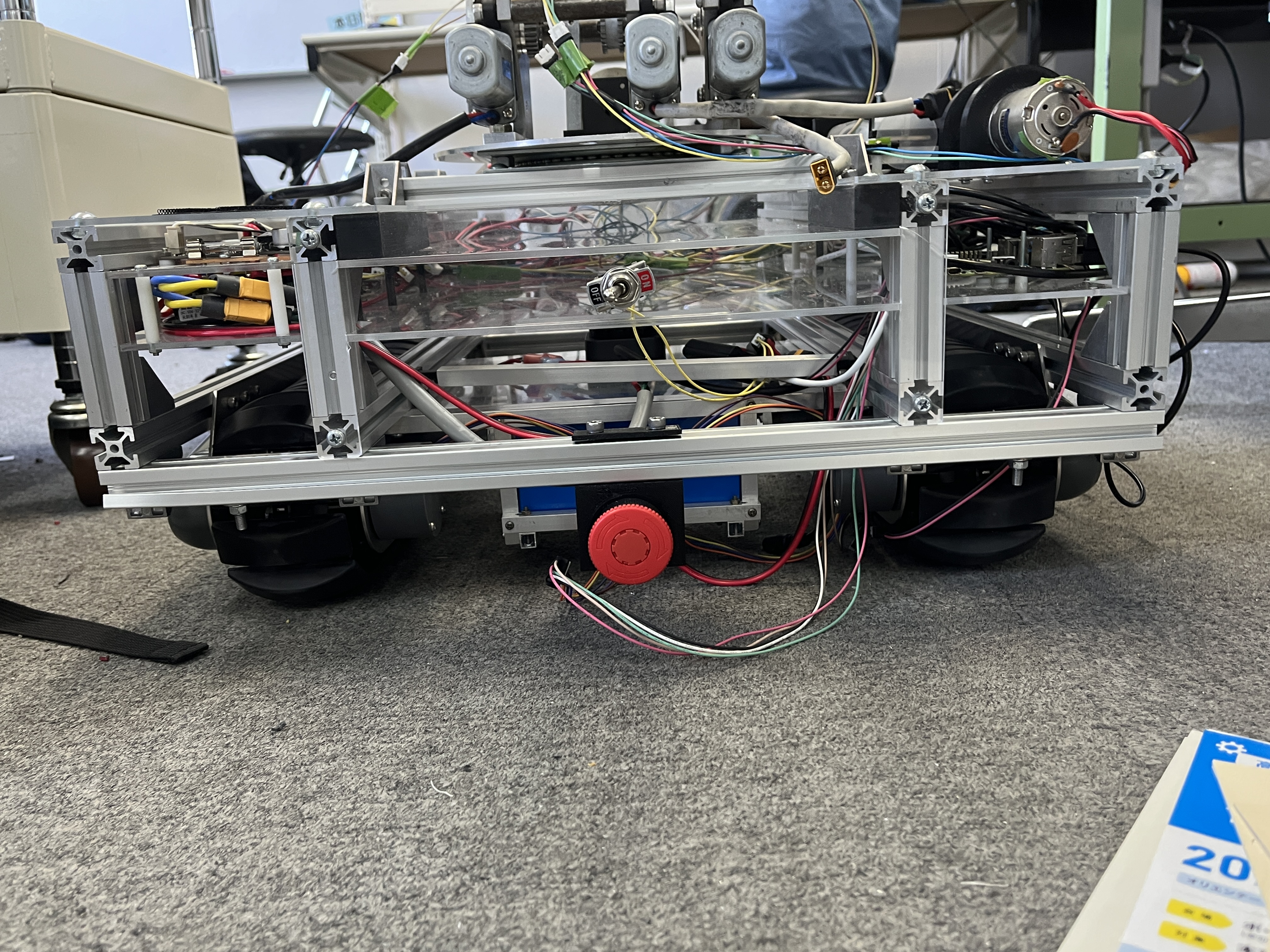
以下に𝔊𝔘𝔏𝔏ℭの外観図を示す。
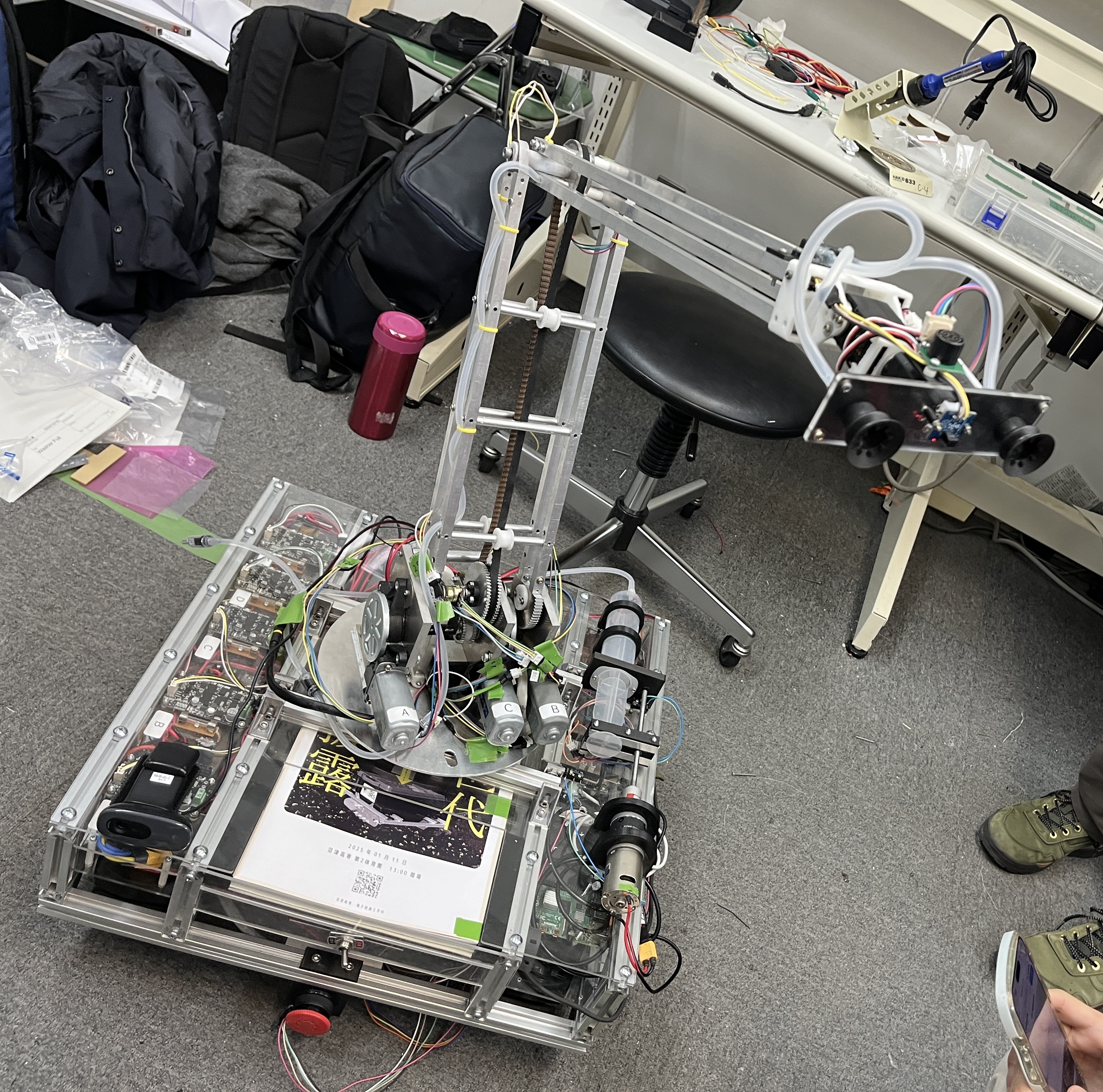
図1.全体図
以下に𝔊𝔘𝔏𝔏ℭの主なスペックを示す。
<サイズ>
全長:516.0mm
全幅:520.5mm
高さ:804.0mm(最小)
1335.7mm(最大)
<重さ>
17.1kg(メカ部品のみ)
21.5kg(全部品込み)
<アーム可搬質量>
0.5kg以下
<ポンプ容量>
120ml(設計)
90ml(実用)
サイズと重さについての評価
<サイズ>
載せなければいけないエレキ部品が多く重心を低く保たなければいけないため、大きくなった。
バッテリーが隠れていることやLiDARの死角が走交体の斜め方向にしかない事を考えると無駄のない設計であった。
<重さ>
CUGO V3が5.2kg、ユニット質量が16.3kg、CUGO V3の積載荷重が80.0kgであることを考えると何の問題もない重量となった。
重くなった原因は、剛性を上げるためにアルミとアクリルを多用した事である。