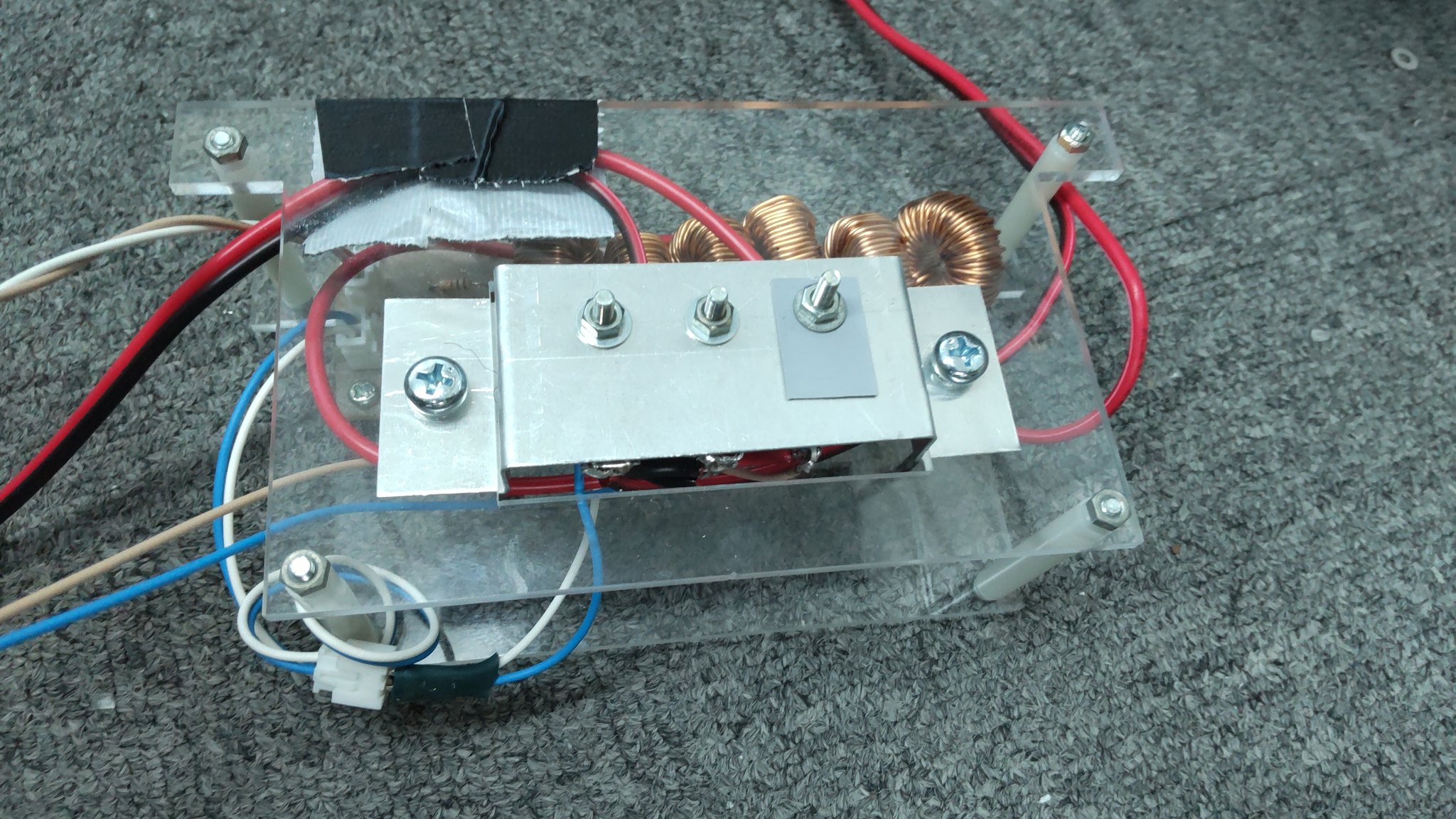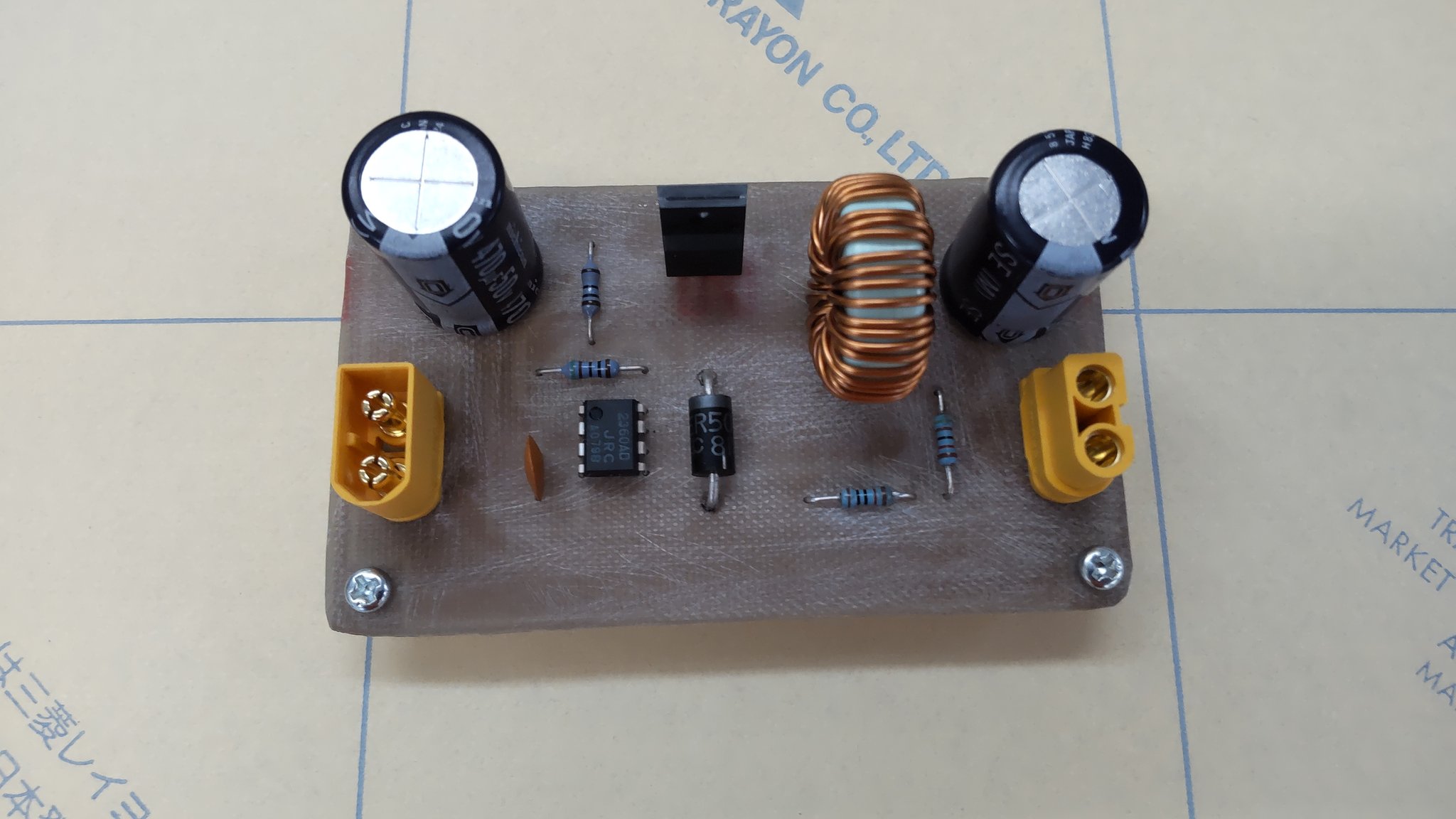
fig.1 サーボモータ電源回路 表面
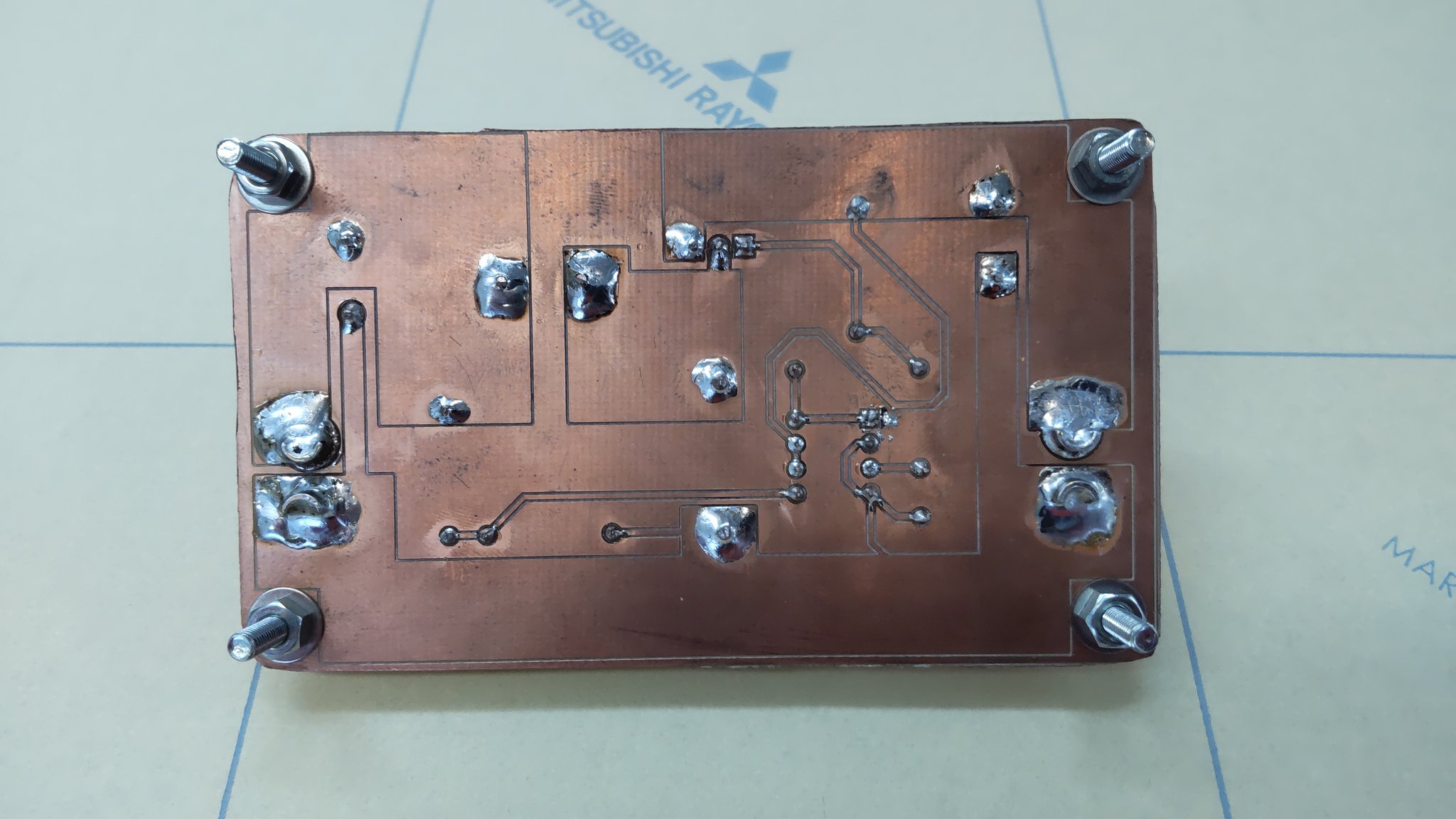
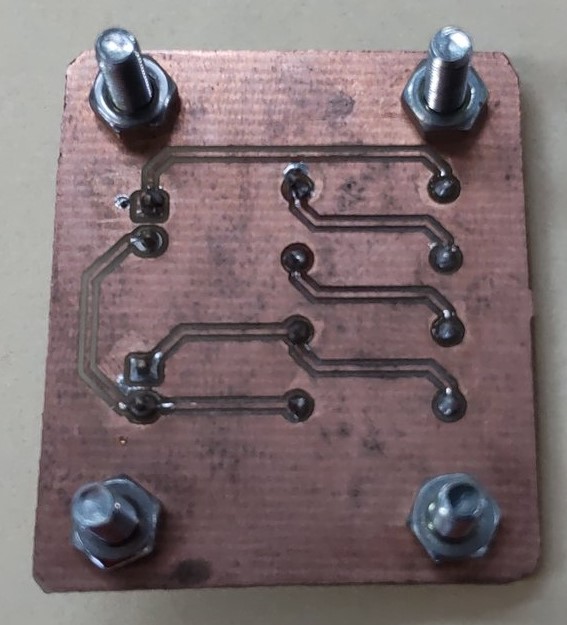
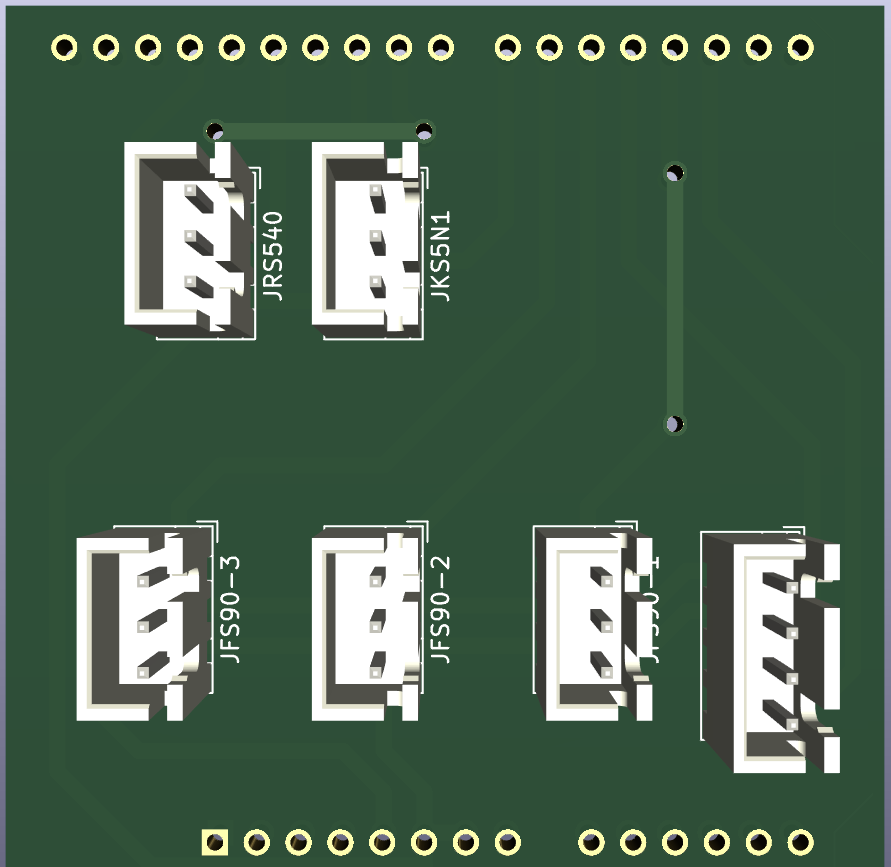
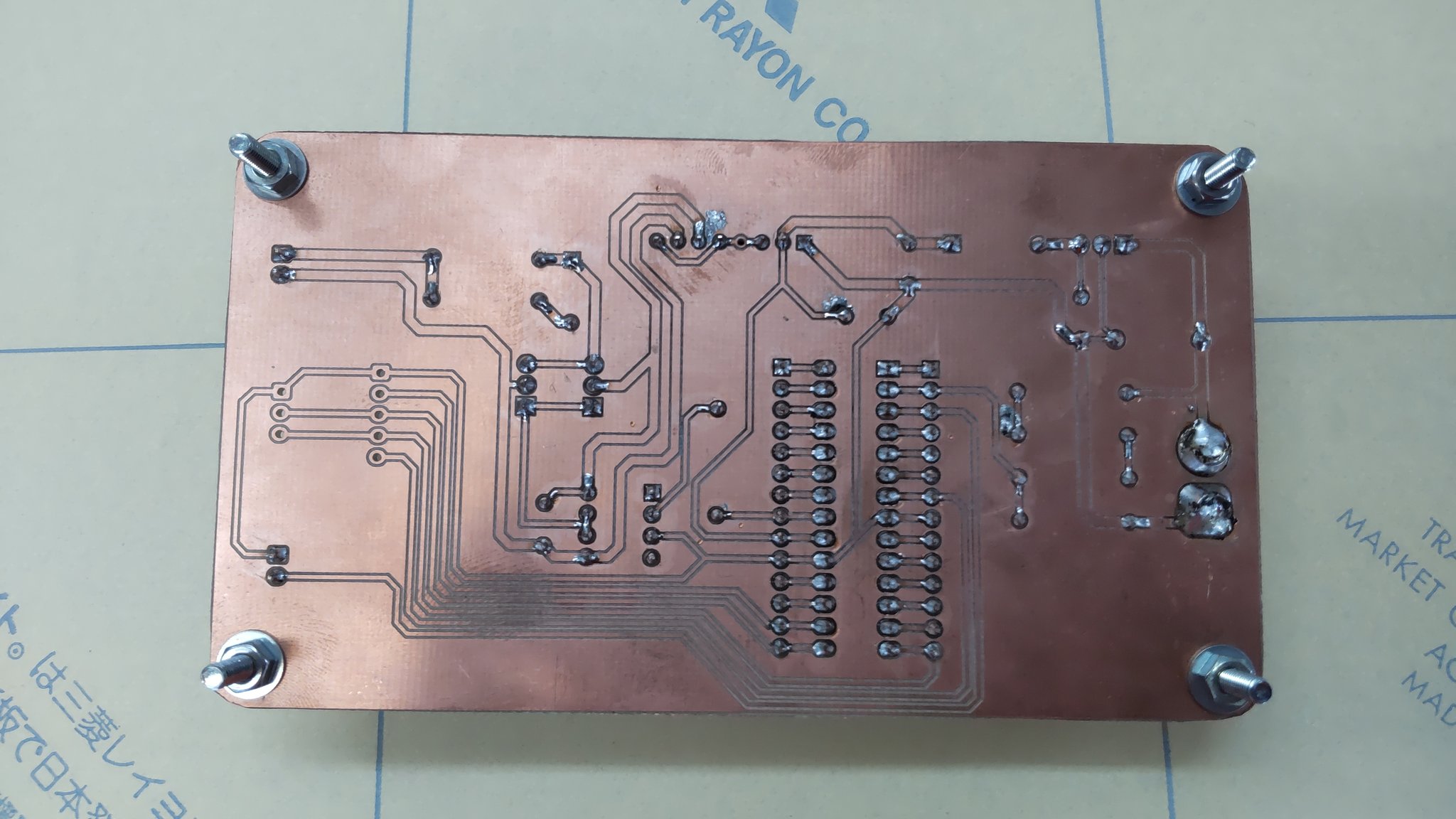
fig.2 サーボモータ電源回路 裏面
| 名称 | MIRS2405 エレクトロニクス開発報告書 |
|---|---|
| 番号 | MIRS2405-ELEC-0002 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2024.11.18 | 宇佐見祥 | 初版 | |
| A02 | 2024.12.10 | 宇佐見祥 | 主回路モジュール項の追加とゲート基板画像の差し替え | |
| A03 | 2025.01.31 | 宇佐見祥 | 試験結果の追記 | |
| A04 | 2025.02.14 | 宇佐見祥 | 大沼巧先生 | 単体試験に関する負荷条件の追記, 不具合報告書の追加 |
| ファイル | 種類 | 詳細 |
|---|---|---|
| MIRS2405_ServoDCDC-B_Cu.gbr | ガーバー | サーボ電源基板の裏面銅箔部ガーバーデータ |
| MIRS2405_ServoDCDC-Edge_Cuts.gbr | ガーバー | サーボ電源基板の外形線ガーバーデータ |
| MIRS2405_ServoDCDC-PTH.drl | ドリル | サーボ電源基板のドリルデータ |
| MIRS2405_PWM_GD-B_Cu.gbr | ガーバー | PWM・ゲートドライブ基板の裏面銅箔部ガーバーデータ |
| MIRS2405_PWM_GD-Edge_Cuts.gbr | ガーバー | PWM・ゲートドライブ基板の外形線ガーバーデータ |
| MIRS2405_PWM_GD-PTH.drl | ドリル | PWM・ゲートドライブ基板のドリルデータ |
| MIRS2405_OVD_pcb-B_Cu.gbr | ガーバー | 電圧測定基板の裏面銅箔部ガーバーデータ |
| MIRS2405_OVD_pcb-Edge_Cuts.gbr | ガーバー | 電圧測定基板の外形線ガーバーデータ |
| MIRS2405_OVD_pcb-PTH.drl | ドリル | 電圧測定基板のドリルデータ |
| 試験内容 | 合格基準 | 試験結果 | 合否判断 |
|---|---|---|---|
| 出力電圧 | 無負荷時の出力電圧が7.0~7.4V以内に収まっていること。 | 7.2V程度の出力だった。 | 合格 |
| 試験内容 | 試験対象 | 負荷条件 | 合格基準 | 試験結果 | 合否判断 |
|---|---|---|---|---|---|
| ゲート信号のチェック | 主回路全体 | 入力電圧24V,主回路の負荷抵抗10[W]51[Ω] | MOSFETが正常にターンオン・ターンオフできること。 | ゲート信号が出力され、MOSFETを正常にターンオン・ターンオフできることが確認できた。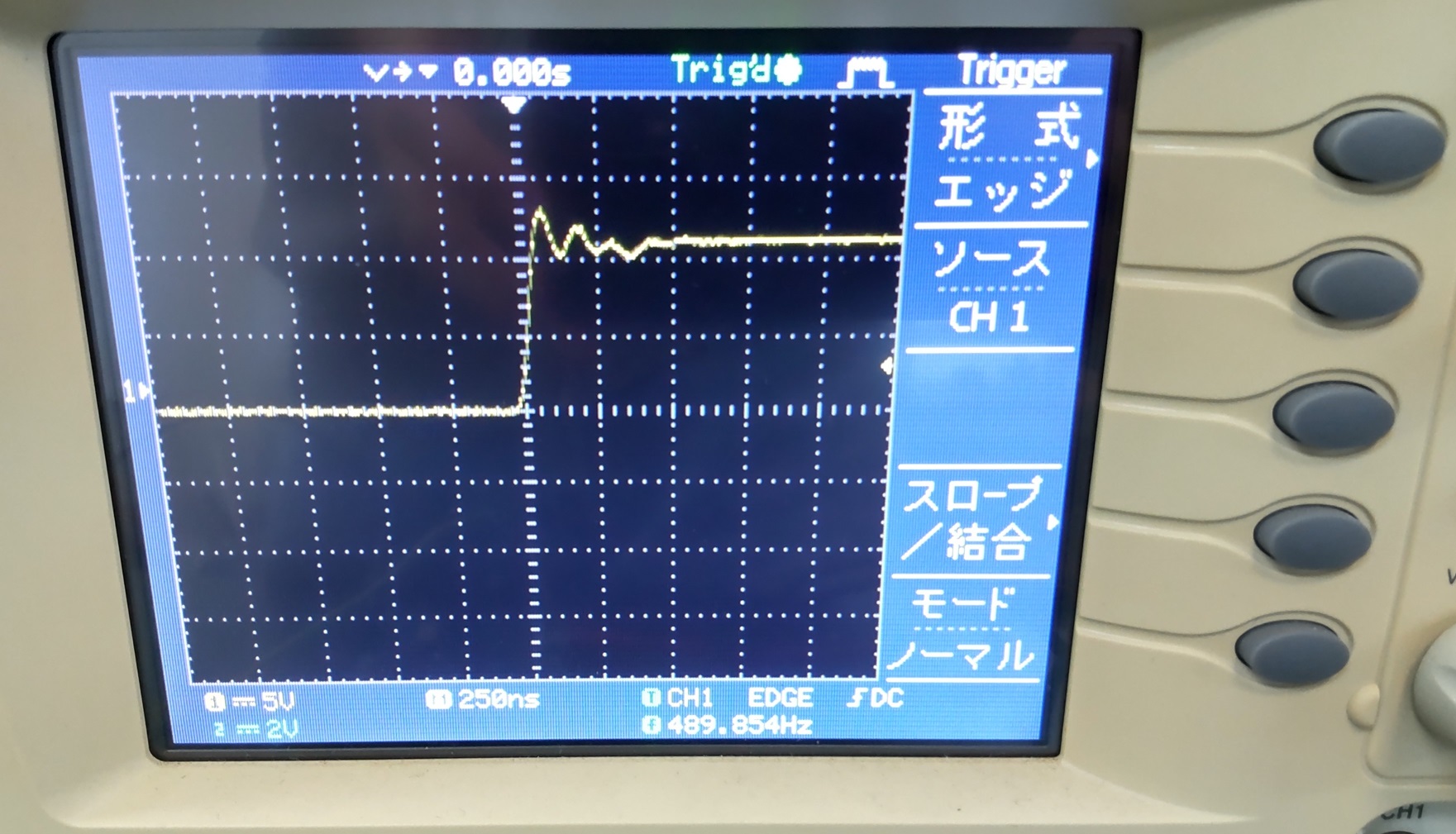 ゲート信号波形には立ち上がりでリンギングが見られる。 |
合格 |
| 主回路の電圧測定回路 | 基板単体 | 無負荷 | マイコンが電圧を正常に読み取ることができること。 | 最大±0.2V程度の誤差で読み取ることができた。 | 合格 |
| 電圧のPI制御 | 主回路全体 | JC-578VA, モーターに負荷は取り付けない | 出力電圧を12Vで維持できること。 | 制御を正常に行うことができた。 | 合格 |
| 電圧のPI制御 | 主回路全体 | KS5N-IG36P, モーターに負荷は取り付けない | 出力電圧を12Vで維持できること。 | 制御を正常に行うことができた。 | 合格 |
| 電圧のPI制御 | 主回路全体 | RS540SH, モーターに負荷は取り付けない | 出力電圧を12Vで維持できること。 | マイコンにリセットがかかり制御を行うことができなかった。 | 不合格 |