配布物を配っている人がいたとき、それをコミュニケーションの観点から受け取りづらい。これは、様々な場面で似た事例は発生する。
客引きロボット導入に向けた社会実験という論文より図1のようなことが示されている。
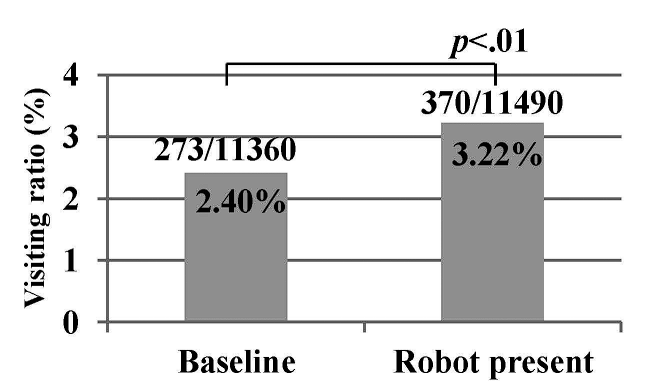
図1.Ratio of visited passers by for cake shop
図1,出典: Field Trial for Social Robots that Invite Visitors to Stores
この論文から分かること- 調査をしたすべての店で立ち止まり率が大きく向上した(1.36%→14.84%)
- 配布物を確認する確率が大きく上昇した
- ロボットを用いた集客で購買行動を行った客の比率が上がった(左図より2.40%→3.22%、約100人増加)
- 一目見てもらいたい
- 配布物を自分で確認してもらいたい
- その後のアクションに繋げたい
このようなケースでロボットを用いるのは非常に有効である。