
| 名称 | MIRS2404 メカトロニクス詳細設計書 |
|---|---|
| 番号 | MIRS2404-MECH-0004 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2024.11.1 | 北川 雄太 | 初版 | |
| A02 | 2024.11.15 | 北川 雄太 | 文章や画像の修正、購入物品の追加 |
本ドキュメントはMIRS2404のフレームの詳細設計である。




| 番号 | 使用部品 | 入手方法 | 個数(個) | 型番 | URL |
|---|---|---|---|---|---|
| フレーム全体 | 設計図へ | ||||
| ① | frame_hashira | ミスミで購入 | 2 | 外見
設計図へ |
|
| ② | frame_hashira_後ろ | ミスミで購入 | 2 | 外見
設計図へ |
|
| ③ | frame2 | ブースの品 | 2 | 外見
設計図へ |
|
| ④ | frame3 | ブースの品 | 2 | 外見
設計図へ |
|
| ⑤ | frame3_2_2 | ブースの品 | 2 | 外見
設計図へ |
|
| ⑥ | frame4 | ブースの品 | 2 | 外見
設計図へ |
|
| ⑦ | frame7 | ブースの品 | 2 | 外見
設計図へ |
|
| ⑧ | frame8_1_2 | ブースの品 | 1 | 外見
設計図へ |
|
| ⑨ | frame8_2_2 | ブースの品 | 1 | 外見
設計図へ |
|
| ⑩ | frame10 | ブースの品 | 2 | 外見
設計図へ |
|
| ⑪ | frame11 | ブースの品 | 1 | 外見
設計図へ |
|
| ⑫ | frame13 | ブースの品 | 1 | 外見
設計図へ |
|
| ⑬ | freame 10×10 470 | ブースの品 | 2 | 外見
設計図へ |
|
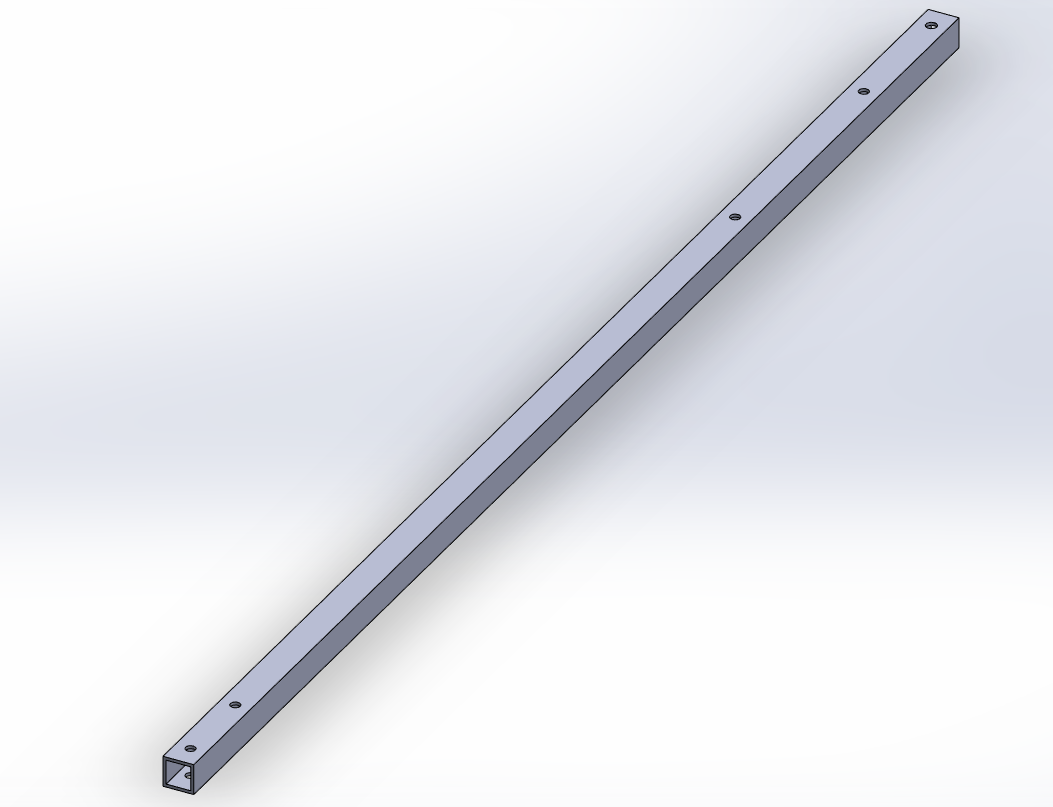
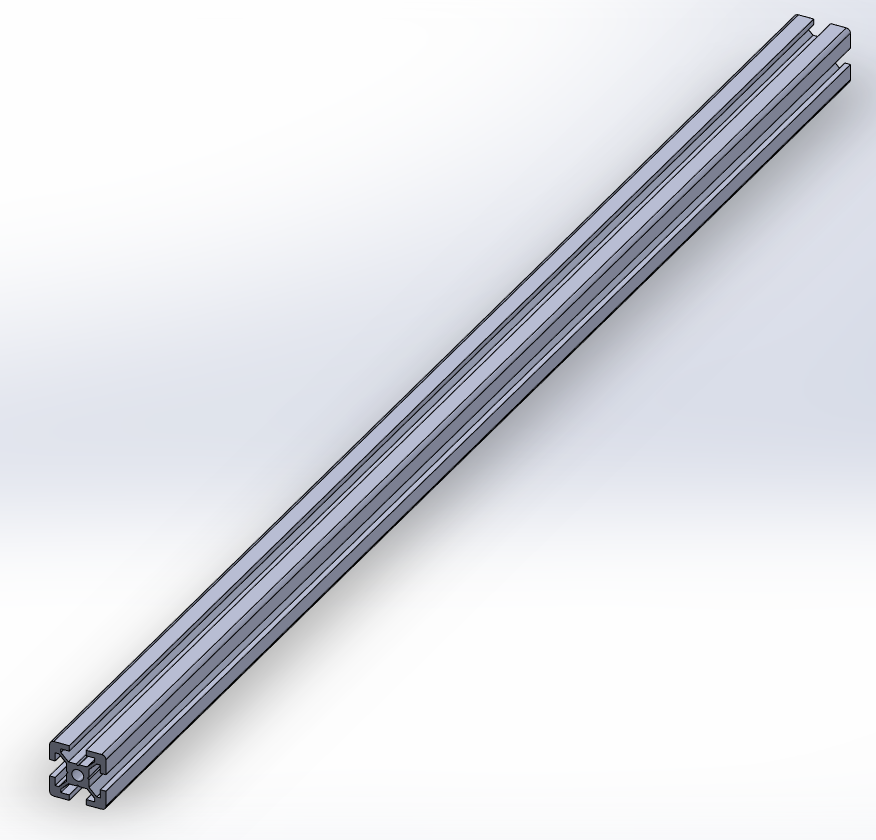
| ⑭ | アルミフレーム 15mm角アルミフレーム | ブースの品 | 2 |
製品ページへ |
|
| ⑮ | NFS2020 | ブースの品 | 6 | 外見
|
|
| ⑯ | freame14 | ブースの品 | 2 | 外見
設計図へ |
|
| m3×40mmビス | ブースの品 | 40 |
|
||
| m3×20mmビス | ブースの品 | 4 |
|
||
| m3ナット | ブースの品 | 44 |
|
||
| m3ワッシャ | ブースの品 | 88 |
|
||
| m5×20㎜ビス | ブースの品 | 8 |
|
| 使用部品 | 入手方法 | 個数 | 型番 | URL |
|---|---|---|---|---|
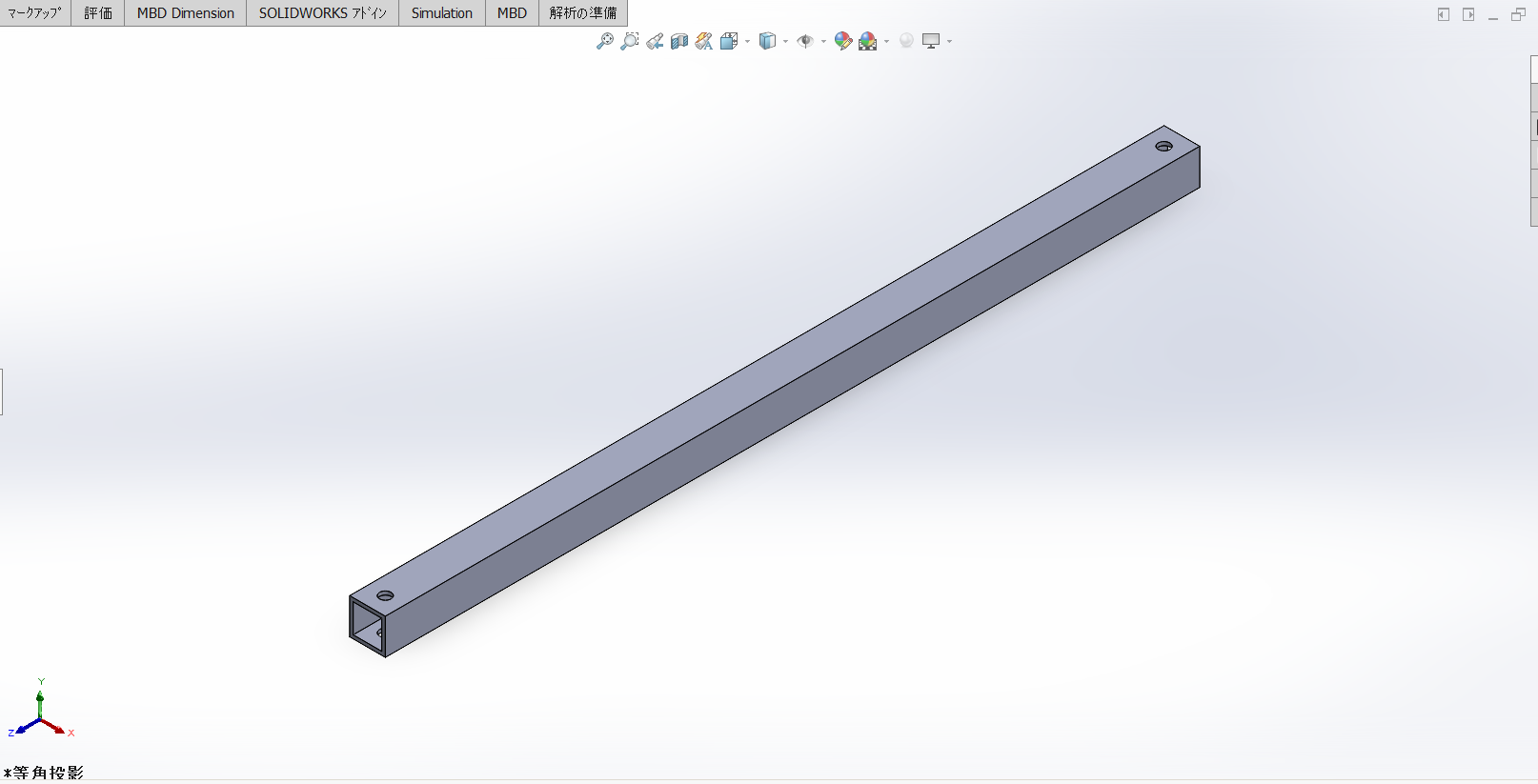
| アルミ 等辺角パイプ(15×15×4000) | ミスミで購入 | 1 | 224-413 | https://jp.misumi-ec.com/vona2/detail/221005482497/?list=PageCategory&HissuCode=224-413 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}