1.はじめに
2.システム構成
3.回路図
3-1.緊急停止ボタン、電圧監視回路
3-2.Aruduino・降圧回路
3-3.Raspberry Pi
3-4.Jetson Nano
3-5.ESP
4.使用物品
1.はじめに
本ドキュメントはMIRS2402 KBinproject、エレクトロニクスについてのドキュメントである。
2.システム構成
全体のシステム構成を以下に示す。
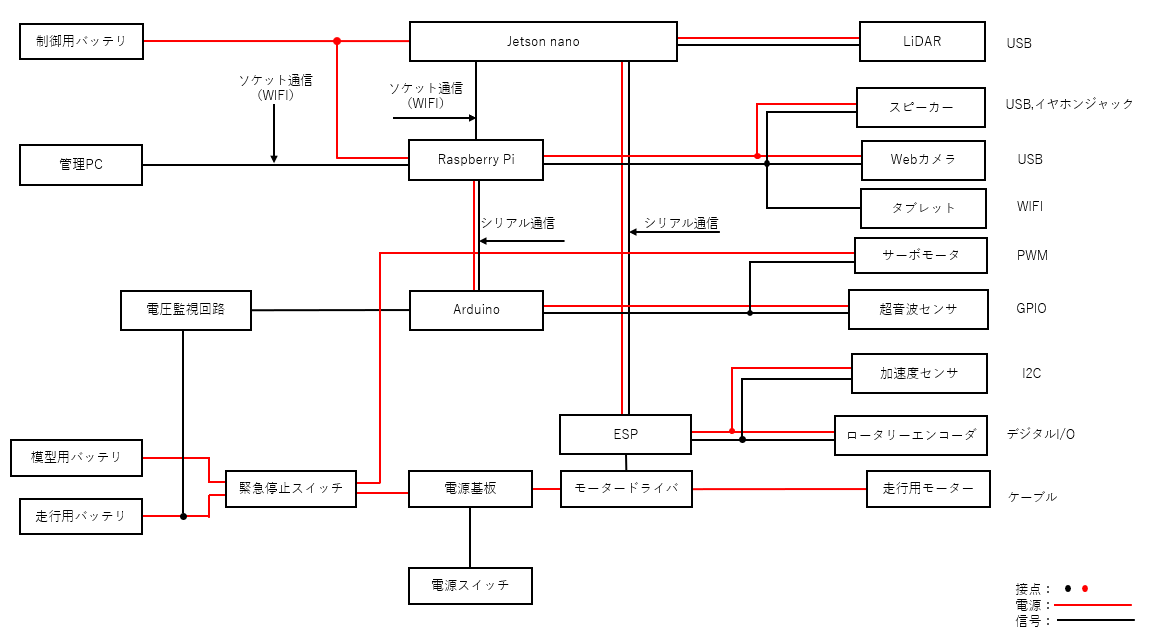
fig1.全体接続図
3.回路図
以下に、緊急停止スイッチ、電圧監視回路、Aruduino、Raspberry Pi、Jetson nano、ESPの回路図を示す。
3-1.緊急停止ボタン、電圧監視回路
緊急停止ボタンと電圧監視回路の回路図を以下に示す。
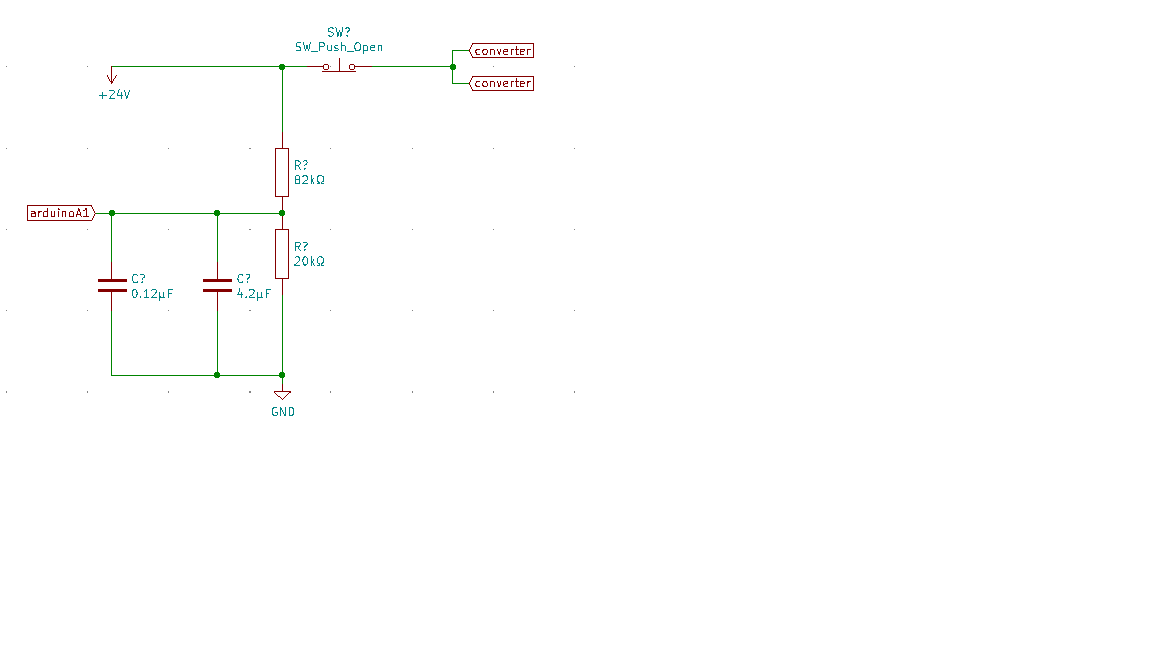
fig2.緊急停止回路・電圧監視回路 回路図
走行用バッテリーの電圧を分圧を用いてAruduinoが計測可能な5V以下まで引き下げて電圧を監視する。また、2つのコンデンサによって高周波、低周波どちらのノイズも軽減する。
最大電圧が4.67Vとなる。この電圧を抵抗の分圧式を用いて最大24Vまで戻しRaspberry Piに送る。
抵抗にかかる電流値は約0.2mAとなっており、発熱に対しては問題ない。
3-2.Arduino・降圧回路
Arduinoの回路図を以下に示す。
また、ピンの接続デバイスをtable.1に示す。
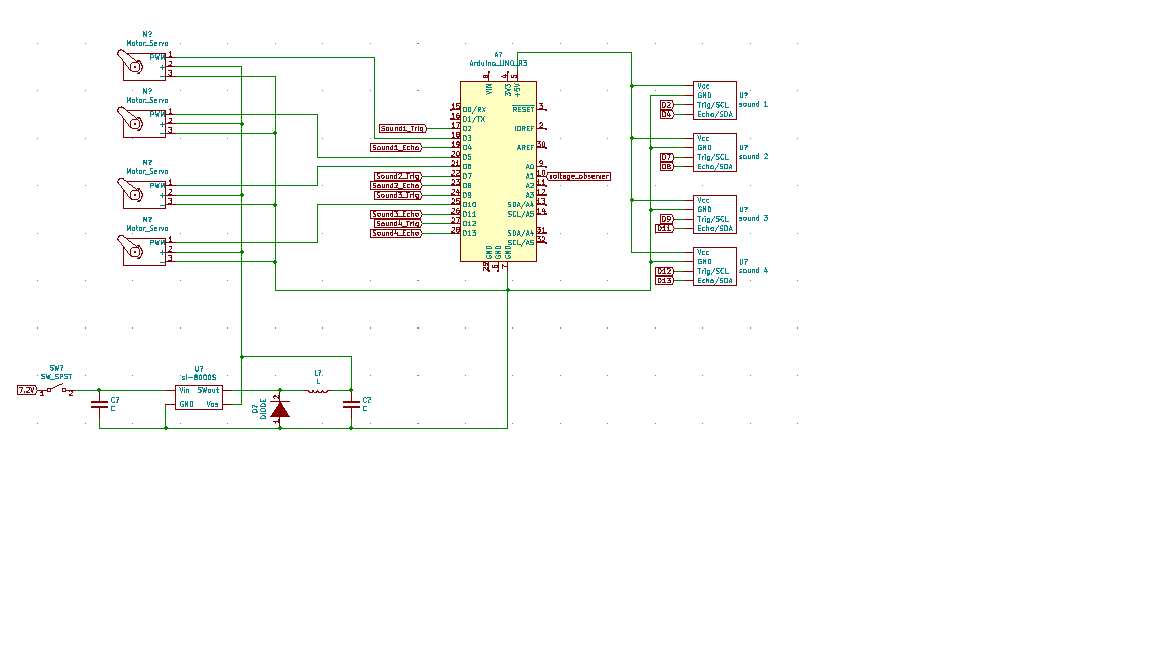
fig3.Arduino・降圧回路 回路図
table.1 Arduino の接続デバイス
ピン番号
接続デバイス
IN/OUT
GND
GND
VCC
5V
OUT
3
サーボモータ1 PWM
OUT
5
サーボモータ2 PWM
OUT
6
サーボモータ3 PWM
OUT
10
サーボモータ4 PWM
OUT
2
超音波センサ1 Trig
OUT
7
超音波センサ2 Trig
OUT
9
超音波センサ3 Trig
OUT
12
超音波センサ4 Trig
OUT
4
超音波センサ1 Echo
IN
8
超音波センサ2 Echo
IN
11
超音波センサ3 Echo
IN
13
超音波センサ 4 Echo
IN
A1
バッテリー電圧監視
IN
ACM0
Raspberry Pi
IN/OUT
Raspberry Piの負荷軽減のため、センサ処理をArduinoにて行う。
降圧のために用いるコンデンサ、コイルの規格はそれぞれ1000μF、150μHである。
3-3.RaspberryPi
ピンの接続デバイスをtable.2に示す。
ソケット通信を用いるため、ピンは使用しない。
table.2 Raspberry Piの接続デバイス
ピン番号/接続方法
接続デバイス
IN/OUT
イヤフォンジャック、USB
スピーカー
OUT
USB type-A
Arduino
IN/OUT
USB type-A
カメラ
OUT
3-4.Jetson Nano
ピンの接続デバイスをtable.3に示す。
ソケット通信を用いるため、ピンは使用しない。
table.3 Jetson Nano接続デバイス
ピン番号/接続方法
接続デバイス(ピン番号)
USB type-A
LiDAR
USB type-A
ESP
3-5.ESP
ESPの回路図を以下に示す。
また、ピンの接続デバイスをtable.4に示す。
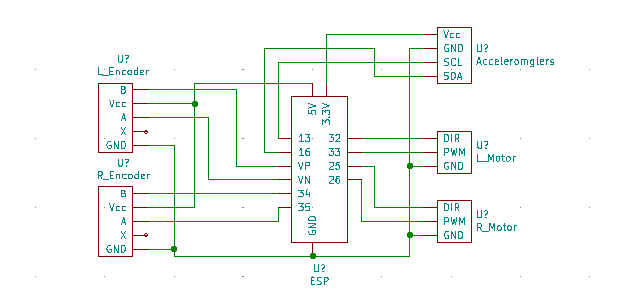
fig4.ESP 回路図
table.4 ESPの接続デバイス
ピン番号/接続方法
接続デバイス
IN/OUT
5V
OUT
3.3V
OUT
GND
VN
走行用エンコーダ(左) A相
IN
35
走行用エンコーダ(右) A相
IN
VP
走行用エンコーダ(左) B相
IN
34
走行用エンコーダ(右) B相
IN
25
走行用クローラDIR(右)
OUT
32
走行用クローラDIR(左)
OUT
26
走行用クローラPWM(右)
OUT
33
走行用クローラPWM(左)
OUT
13
加速度センサ SCL
IN/OUT
16
加速度センサ SDA
IN/OUT
Micro USB type-B
Raspberry Pi
IN/OUT
4.使用物品
使用物品をtable.5に示す。
金額を示している物品を購入する。
table.5 使用物品
物品名
使用数
購入数
備考
サイトURL
金額
承認
Raspberry Pi
1
0
配布されたものを使用
-
jetson nano
1
0
鄭先生から借用
-
スピーカー
1
0
ブースの備品を使用
モノタロウ
-
トグルスイッチ
1
0
ブースの備品を使用
-
カメラ
2
0
警備用Webカメラ 備品を使用
モノタロウ
-
緊急停止ボタン
1
0
ブースの備品を使用
-
超音波センサ
4
4
物体との距離測定、LiDARデータの補完
秋月電子通商
300円
購入済み
加速度センサ
1
0
加速度計、ジャイロスコープ、3軸 備品を使用
秋月電子
750円
購入済み
7.2Vバッテリー
1
0
ブースの備品を使用。詳細は表下に記述
-
サーボモータ
4
0
ブースの備品を使用
秋月電子
-
DC-DC 降圧コンバータ
1
2
7.2Vを5Vに降圧する。
秋月電子
250円
購入済み
コンデンサ 1000μF
2
4
降圧コンバータに用いる。
秋月電子
40円
購入済み
コイル 150μH
1
5
降圧コンバータに用いる。
秋月電子
100円
購入済み
ショットキーバリアダイオード
1
2
降圧コンバータに用いる
秋月電子
250円
購入済み
購入物品の合計金額は3210円となる。
NASTIMA 7.2v ニッケル水素バッテリー 4000mAh
公称容量:4000mAh 公称電圧:7.2V サイズ:137×48×24mm 重量:約405g 充電電流値:800mA(0.2C)充電時間:6時間 充電最大電圧値:8.7V コネクター:タミヤ。
MIRS2402ドキュメント管理台帳へ
fig1.全体接続図
fig2.緊急停止回路・電圧監視回路 回路図
fig3.Arduino・降圧回路 回路図
| ピン番号 | 接続デバイス | IN/OUT |
|---|---|---|
| GND | GND | VCC | 5V | OUT |
| 3 | サーボモータ1 PWM | OUT |
| 5 | サーボモータ2 PWM | OUT |
| 6 | サーボモータ3 PWM | OUT |
| 10 | サーボモータ4 PWM | OUT |
| 2 | 超音波センサ1 Trig | OUT |
| 7 | 超音波センサ2 Trig | OUT |
| 9 | 超音波センサ3 Trig | OUT |
| 12 | 超音波センサ4 Trig | OUT |
| 4 | 超音波センサ1 Echo | IN |
| 8 | 超音波センサ2 Echo | IN |
| 11 | 超音波センサ3 Echo | IN |
| 13 | 超音波センサ 4 Echo | IN |
| A1 | バッテリー電圧監視 | IN |
| ACM0 | Raspberry Pi | IN/OUT |
| ピン番号/接続方法 | 接続デバイス | IN/OUT |
|---|---|---|
| イヤフォンジャック、USB | スピーカー | OUT |
| USB type-A | Arduino | IN/OUT |
| USB type-A | カメラ | OUT |
| ピン番号/接続方法 | 接続デバイス(ピン番号) |
|---|---|
| USB type-A | LiDAR |
| USB type-A | ESP |
fig4.ESP 回路図
| ピン番号/接続方法 | 接続デバイス | IN/OUT |
|---|---|---|
| 5V | OUT | |
| 3.3V | OUT | |
| GND | ||
| VN | 走行用エンコーダ(左) A相 | IN |
| 35 | 走行用エンコーダ(右) A相 | IN |
| VP | 走行用エンコーダ(左) B相 | IN |
| 34 | 走行用エンコーダ(右) B相 | IN |
| 25 | 走行用クローラDIR(右) | OUT |
| 32 | 走行用クローラDIR(左) | OUT |
| 26 | 走行用クローラPWM(右) | OUT |
| 33 | 走行用クローラPWM(左) | OUT |
| 13 | 加速度センサ SCL | IN/OUT |
| 16 | 加速度センサ SDA | IN/OUT |
| Micro USB type-B | Raspberry Pi | IN/OUT |
| 物品名 | 使用数 | 購入数 | 備考 | サイトURL | 金額 | 承認 |
|---|---|---|---|---|---|---|
| Raspberry Pi | 1 | 0 | 配布されたものを使用 | - | ||
| jetson nano | 1 | 0 | 鄭先生から借用 | - | ||
| スピーカー | 1 | 0 | ブースの備品を使用 | モノタロウ | - | |
| トグルスイッチ | 1 | 0 | ブースの備品を使用 | - | ||
| カメラ | 2 | 0 | 警備用Webカメラ 備品を使用 | モノタロウ | - | |
| 緊急停止ボタン | 1 | 0 | ブースの備品を使用 | - | ||
| 超音波センサ | 4 | 4 | 物体との距離測定、LiDARデータの補完 | 秋月電子通商 | 300円 | 購入済み |
| 加速度センサ | 1 | 0 | 加速度計、ジャイロスコープ、3軸 備品を使用 | 秋月電子 | 750円 | 購入済み |
| 7.2Vバッテリー | 1 | 0 | ブースの備品を使用。詳細は表下に記述 | - | ||
| サーボモータ | 4 | 0 | ブースの備品を使用 | 秋月電子 | - | |
| DC-DC 降圧コンバータ | 1 | 2 | 7.2Vを5Vに降圧する。 | 秋月電子 | 250円 | 購入済み |
| コンデンサ 1000μF | 2 | 4 | 降圧コンバータに用いる。 | 秋月電子 | 40円 | 購入済み | コイル 150μH | 1 | 5 | 降圧コンバータに用いる。 | 秋月電子 | 100円 | 購入済み |
| ショットキーバリアダイオード | 1 | 2 | 降圧コンバータに用いる | 秋月電子 | 250円 | 購入済み |