3-1.メカニクス
以下に示す機構を設計する。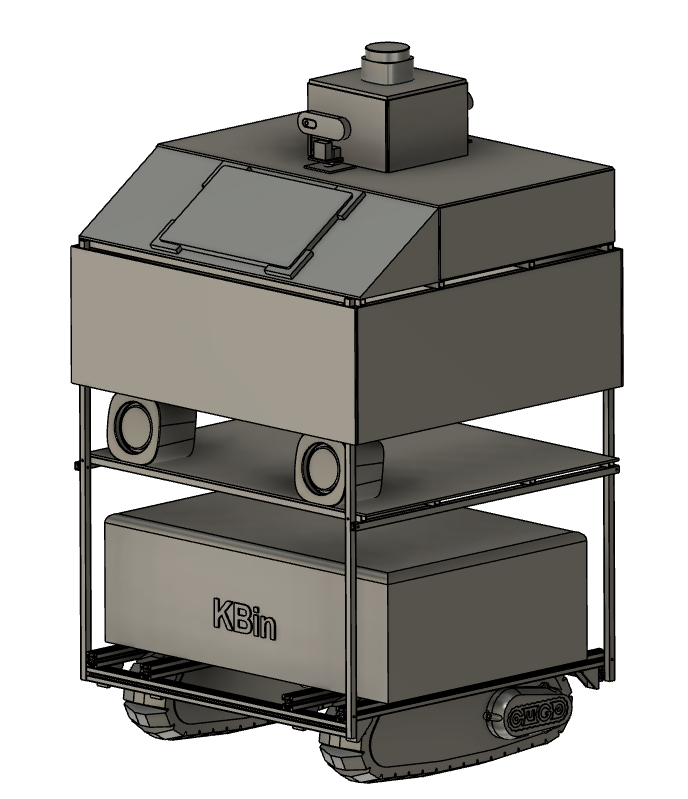
fig1.全体図
三段構造で構成されており、下段にボックス、中段にスピーカーやセンサ類(加速度センサや超音波センサ)、上段にタブレット、LiDAR、前後のカメラを設置する。
Webカメラを機体の前後に2台設置することで、カメラを通して警備できる範囲が広がる。
これが質の高い警備の実現に繋がる。
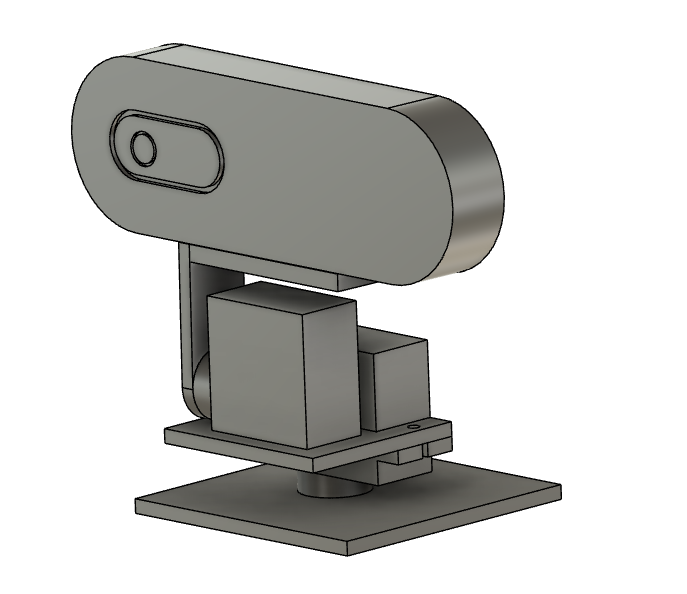
fig2.カメラの画角調整機構
パン・チルト機構を採用することでカメラの画角を変更・調整する。
具体的には1台のカメラに対して2個のサーボモータを使うことで
カメラの画角を上下・左右に変更・調整することが可能となっている。
この機構によってカメラに映る範囲を増やすことができる。
視野角は前後それぞれ300°程度を想定している。
安全対策として、角ばった部分に保護用のキャップなどを付ける。
夜間の視認性を向上するため、マーカーランプ等を用いた電飾を追加する。
3-2.エレクトロニクス
エレクトロニクスのシステム構成について下図に示す。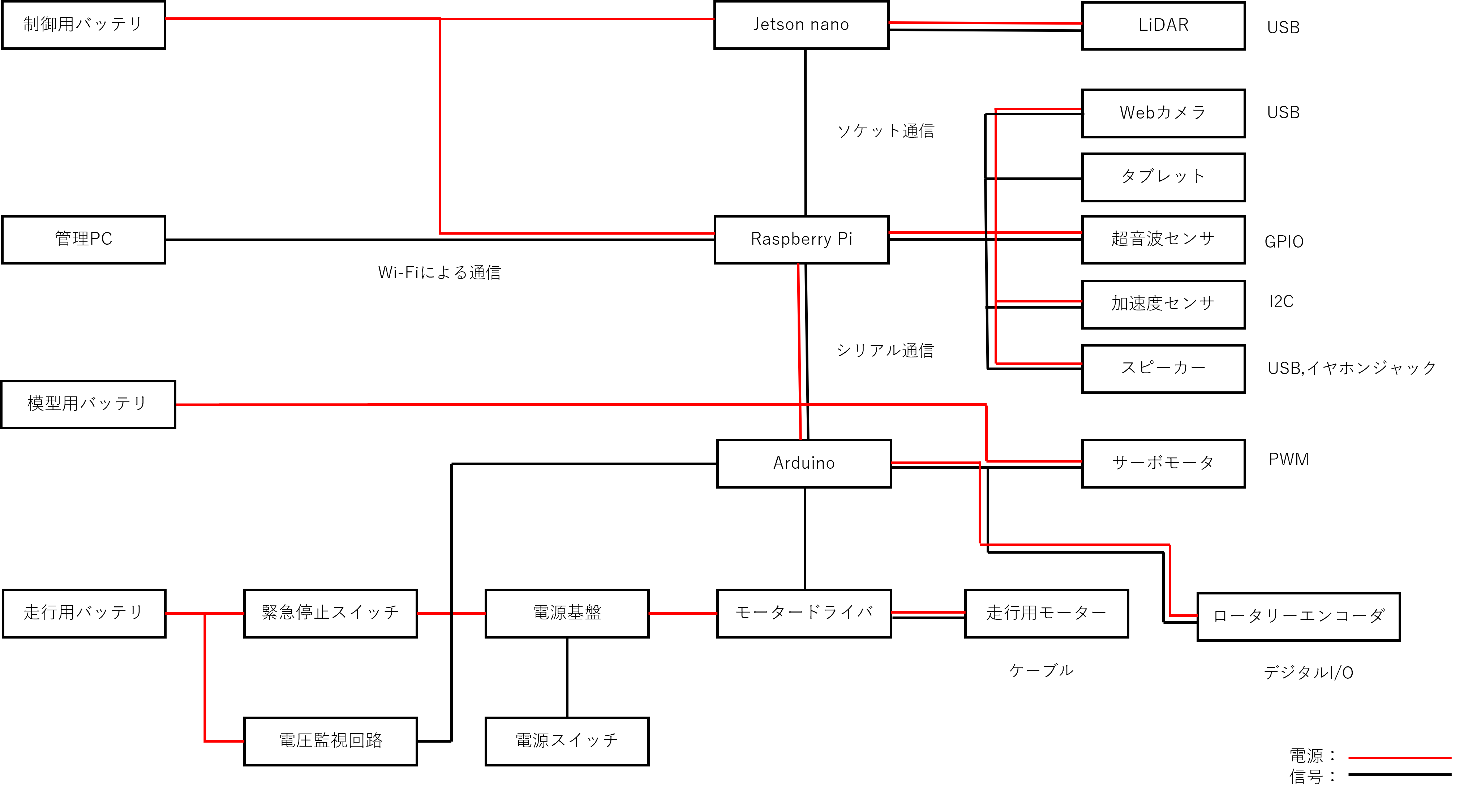
fig3.システム構成図
| 名称 | 個数 | 性能 | 電源供給先 |
|---|---|---|---|
| 制御用バッテリ | 1 | 5V,25600mAh | Raspberry Pi |
| 走行用バッテリ | 1 | 24V,6Ah | モータドライバ |
| 模型用バッテリ(ニッケル水素) | 1 | 7.2V,4000mAh | サーボモータSG90 |
| 名称 | 個数 | 電源供給元 | 接続方式 |
|---|---|---|---|
| LiDAR | 1 | jetson nano | USB |
| カメラ | 2 | Raspberry Pi | USB |
| タブレット | 1 | Raspberry Pi | USB |
| 超音波センサ | 4 | Raspberry Pi | GPIO |
| 加速度センサ | 1 | Raspberry Pi | I2C |
| スピーカー | 2 | Raspberry Pi | イヤホンジャック, USB |
| ロータリーエンコーダ | 2 | Arduino Uno | デジタルI/O |
| 名称 | 個数 | 電源供給元 | 接続方式 |
|---|---|---|---|
| 走行用モータ | 2 | モータドライバ | ケーブル |
| サーボモータ | 4 | Arduino Uno | デジタルI/O(PWM) |
3-3.ソフトウェア
ソフトウェアの全体構成について下図に示す。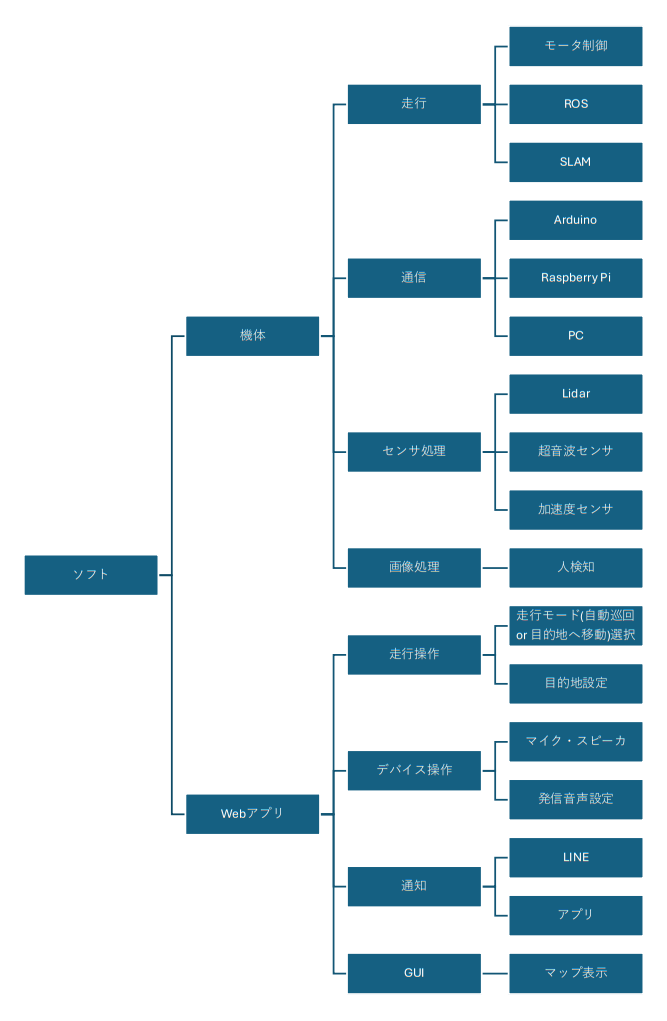
fig4.ソフトウェア構成図
| 名称 | 通信先 | 通信方式 |
|---|---|---|
| Raspberry Pi | jetson nano, Arduino, 管理PC | ソケット通信, シリアル通信, Wi-Fi |
| jetson nano | Raspberry Pi | ソケット通信 |
| Arduino | Raspberry Pi | シリアル通信 |
| 管理PC | Raspberry Pi | Wi-Fi |
| 機能 | 開発項目 | 詳細 |
|---|---|---|
| 走行 | モータ制御 | 走行制御 |
| ROS | 走行経路を自動選択 | |
| SLAM | 機体の自己位置推定 | |
| Raspberry Pi通信 | Arduino | Raspberry Pi-Arduino 間通信 Jetson nanoのデータからモータ制御 |
| Jetson nano | Raspberry Pi-Jetson nano間通信 ROS,SLAMによるデータを通信 |
|
| PC | Raspberry Pi-PC間通信 Webカメラの映像中継、Webアプリによるデータ通信 Wi-Fi経由による通信 |
|
| センサ処理 | LiDAR | Jetson nanoによる処理 |
| 超音波センサ | Raspberry Piによる処理 LiDARのデータの補完 |
|
| 加速度センサ | Raspberry Piによる処理 | |
| 画像処理 | 人検知 | TensorFlowによる物体検出 |
| 実装環境 | 機能 | 開発項目 | 詳細 |
|---|---|---|---|
| Webアプリ | 走行操作 | 走行モード選択 | Webアプリにより、自動巡回または目的地への移動を選択 |
| 目的地設定 | マップ選択または部屋名入力により、目的地を設定 | ||
| デバイス操作 | マイク・スピーカ | マイク・スピーカのon/off、音量を操作 | |
| 発信音声設定 | 発信する文章の設定 音声宣伝、不審者威嚇など、運用する状況に合わせて変更可能 |
||
| 通知 | Webアプリ | 人検知時、Webアプリへ通知 | |
| GUI | 映像表示 | Webカメラの映像を表示 | |
| map表示 | 機体の位置をmap上に表示 | ||
| LINE | 通知 | 公式アカウント | 人検知時、PC上のLINEへ通知 |