
|

|
| 名称 | MIRS2401 開発完了報告書 |
|---|---|
| 番号 | MIRS2401-REPT-0002 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A02 | 2025. 2. 14 | 渡辺尊 | 青木先生 | DRで指摘された点を修正 |
本ドキュメントは、MIRS2401の開発完了報告書である.
製作した機体をfig.1からfig.3に示す.
|
|
|

MIRS2024新作ロボット発表会での結果は以下のとおりである.
| 得票数 | 得票率 | 順位 | |
|---|---|---|---|
| MIRS2401 GAPLESS |
18 | 9% | |
| MIRS2402 KBin |
29 | 14% | |
| MIRS2403 華蟻 |
86 | 41% | |
| MIRS2404 AQUA |
24 | 12% | |
| MIRS2405 GULLC |
53 | 25% |
| コンセプト | 機能 | 社会実験 | ニーズ | 実現度 | 合計 | 順位 | |
|---|---|---|---|---|---|---|---|
| MIRS2401 GAPLESS |
76.7% | 66.7% | 80% | 66.7% | 76.7% | 73.3% | |
| MIRS2402 KBin |
73.3% | 66.7% | 63.3% | 66.7% | 70% | 68% | |
| MIRS2403 華蟻 |
86.7% | 93.3% | 80% | 80% | 90% | 86% | |
| MIRS2404 AQUA |
73.3% | 80% | 73.3% | 66.7% | 66.7% | 72% | |
| MIRS2405 GULLC |
70% | 70% | 70% | 66.7% | 70% | 69.3% |
結果として,GAPLESSは発表会で他の班と比較して評価されなかったといえる. その原因として,発表会の来場者はGAPLESSの本来の対象者である学校を知らない見学者ではないことが挙げられる. 特に,GAPLESSの革新的なポイントであるマッチングについては既に機を逃し,その良さが立場上良く伝わらなかったと考えられる. また,概観的な面でも,メカでの尖った部分が本来昇降機構などであるはずだったのが無くなり,目立っているのがその外装だけとなってしまったというのも大きいと思われる. 一方で,技術的な評価においては,コンセプトや実現度で他の班と遜色ない評価が得られている. 特に,社会実験の面での評価が高く,ロボットが社会実装されたときの働きについて, コンセプトの「ギャップをなくす」ことへの期待が持たれていることが示唆される.
社会実験をするにあたっては,「ギャップをなくす」ことが期待されていることを念頭におきつつ実験に臨みたいと思う.(→社会実装実験報告)
発表会の総括として,発表会の来場者による投票と教員による評価(システム提案含む)の違いに着目すると,特に教員からは「ギャップをなくす」というコンセプトについて評価されたのに対して, 発表会ではこれに対する実現度の不透明さがあのような評価につながったと考えられる. さらに言えば,この実現度の程度に関わらず,そのコンセプトをさらに明瞭に伝えるべきであったというのが発表会においての反省点であるように思われる.
開発スケジュールについて,計画と実際の作業工数をtable3,table4に示す.
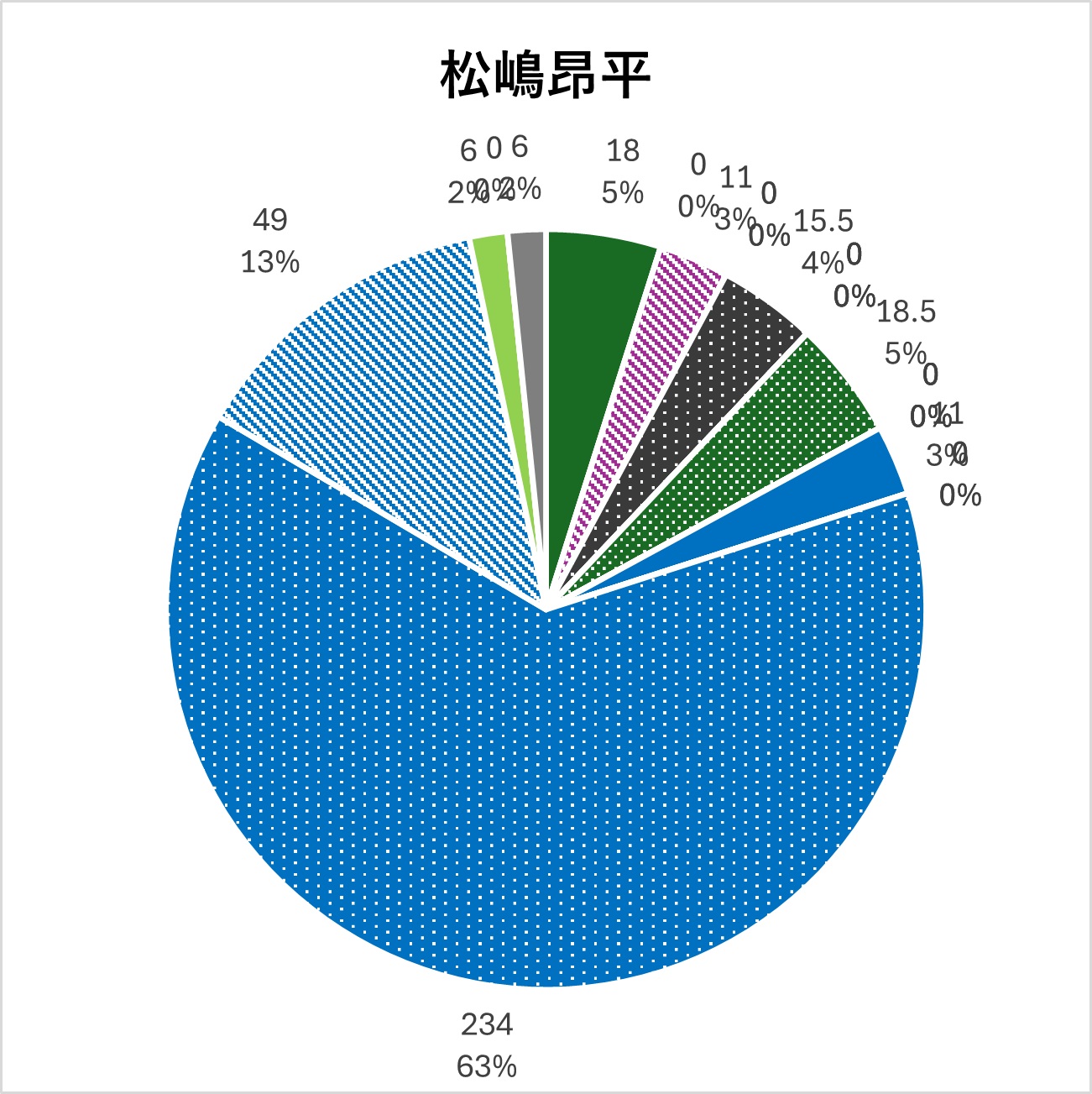
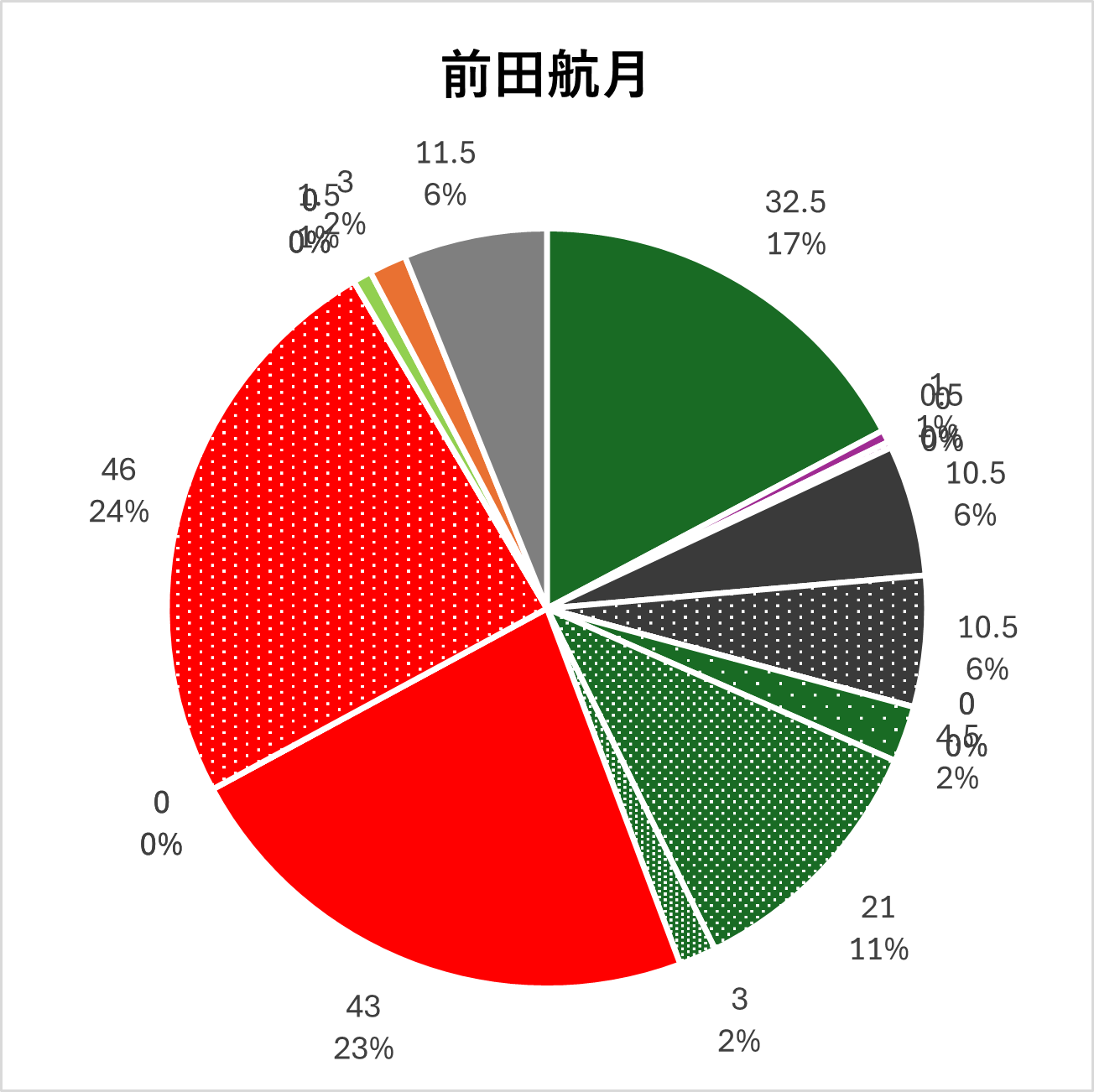
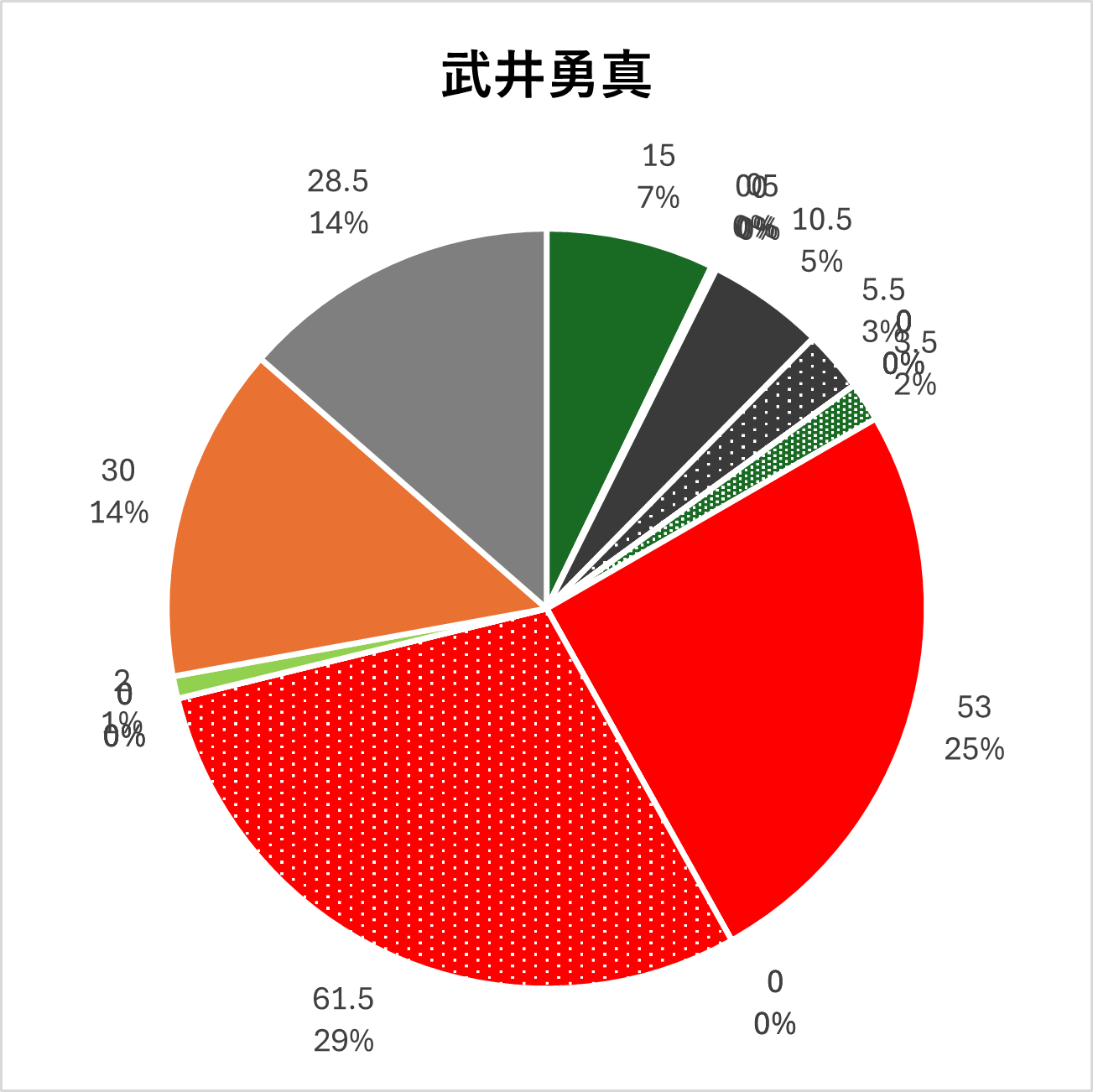
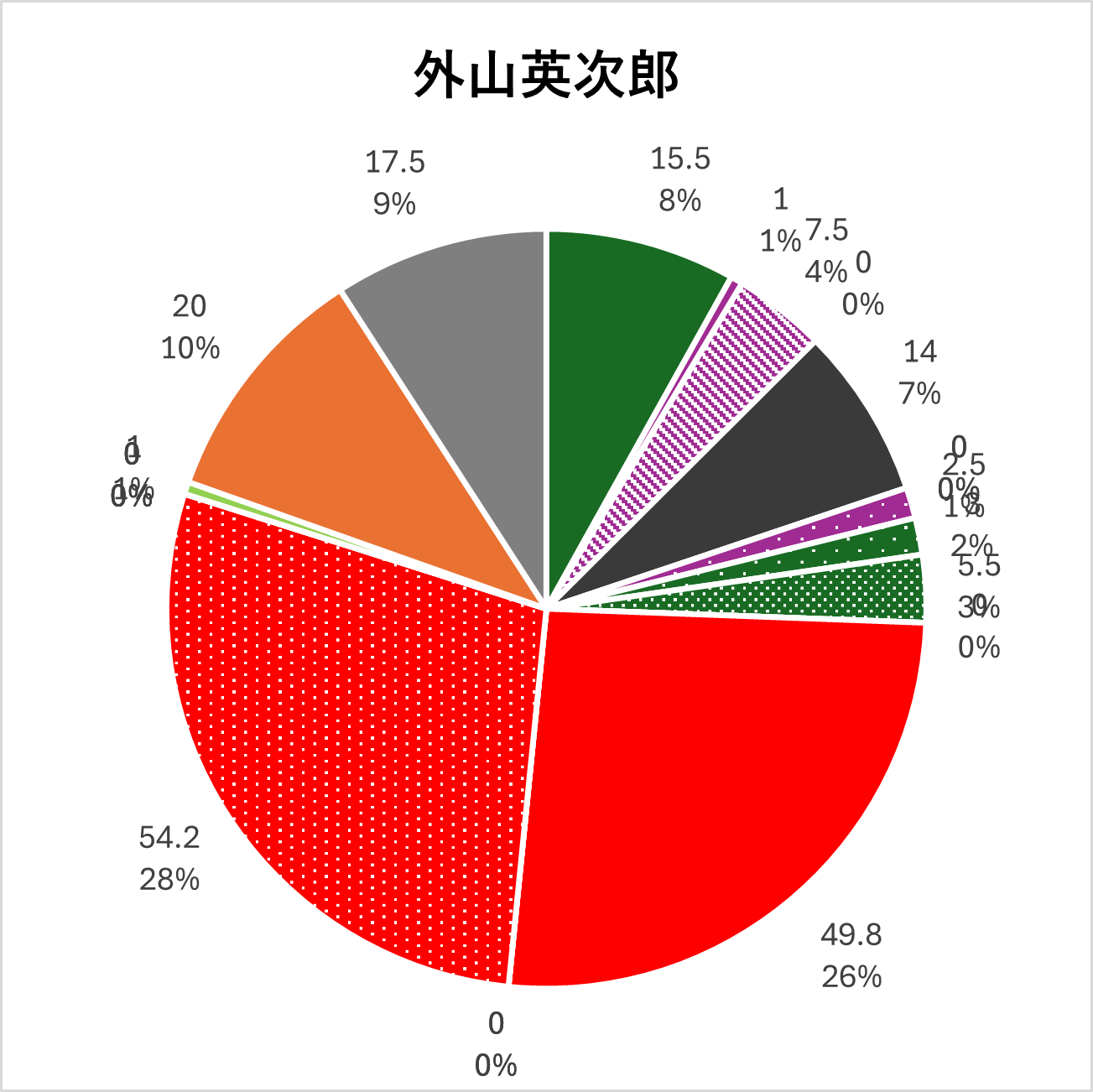
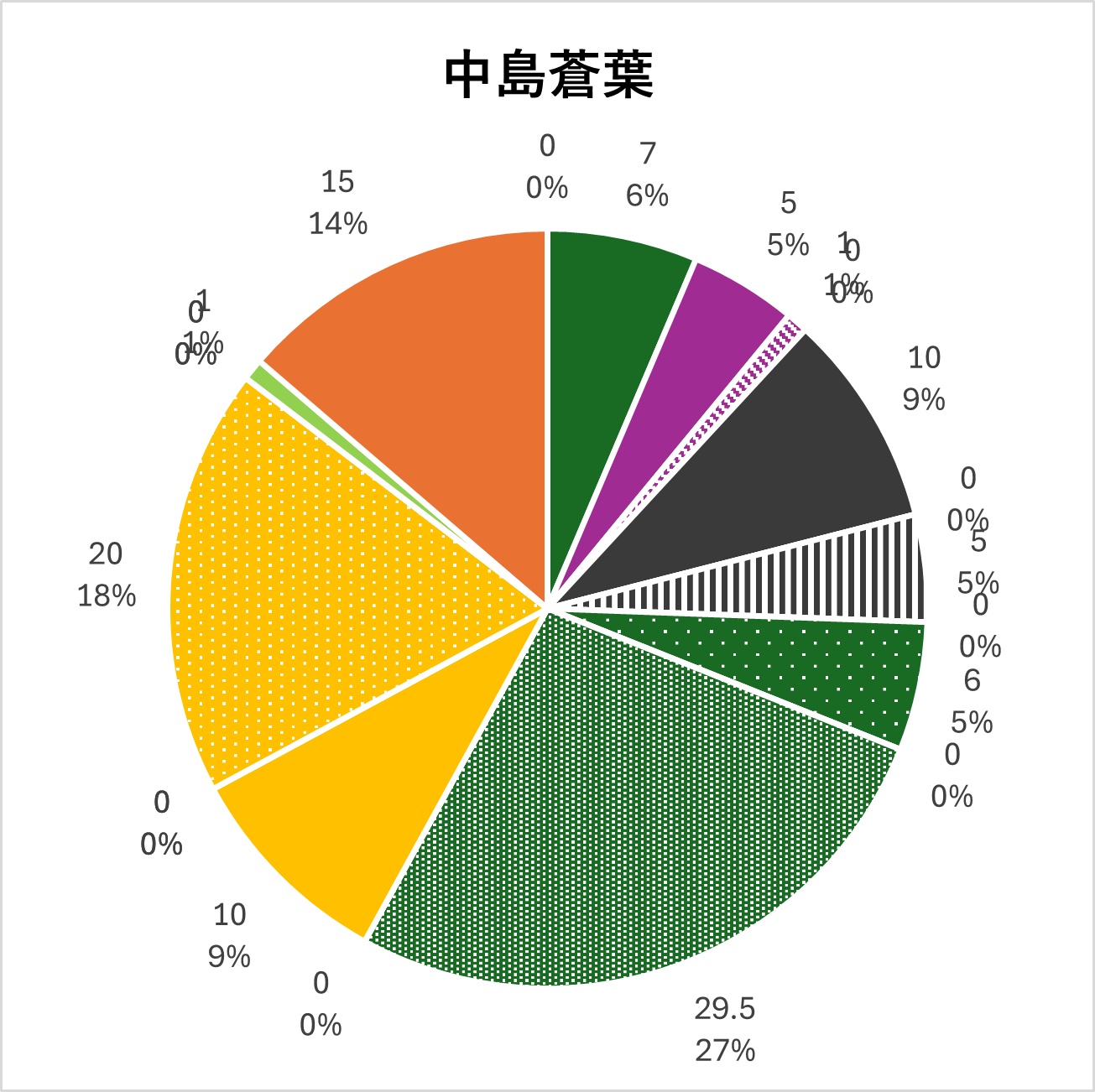
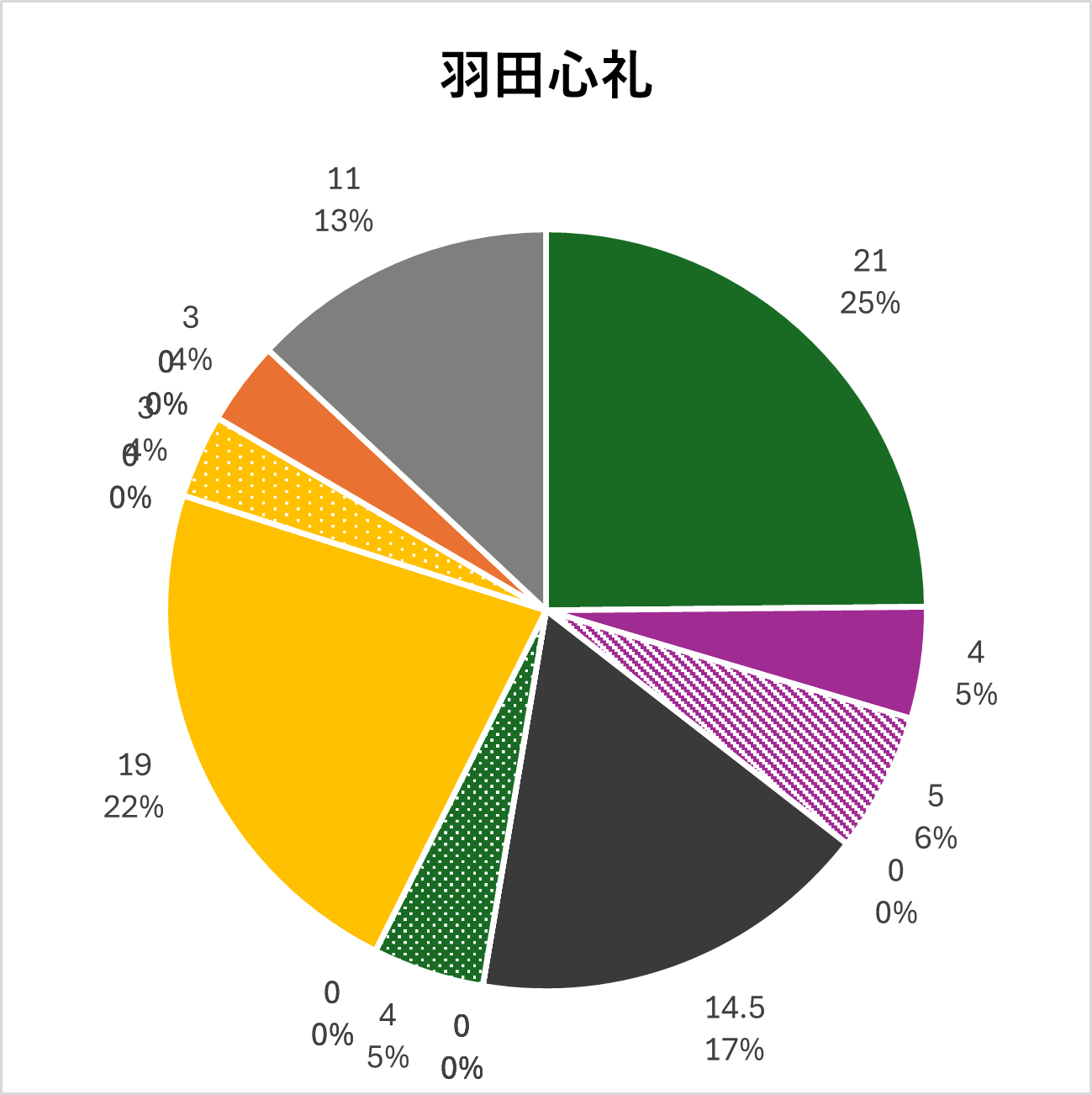
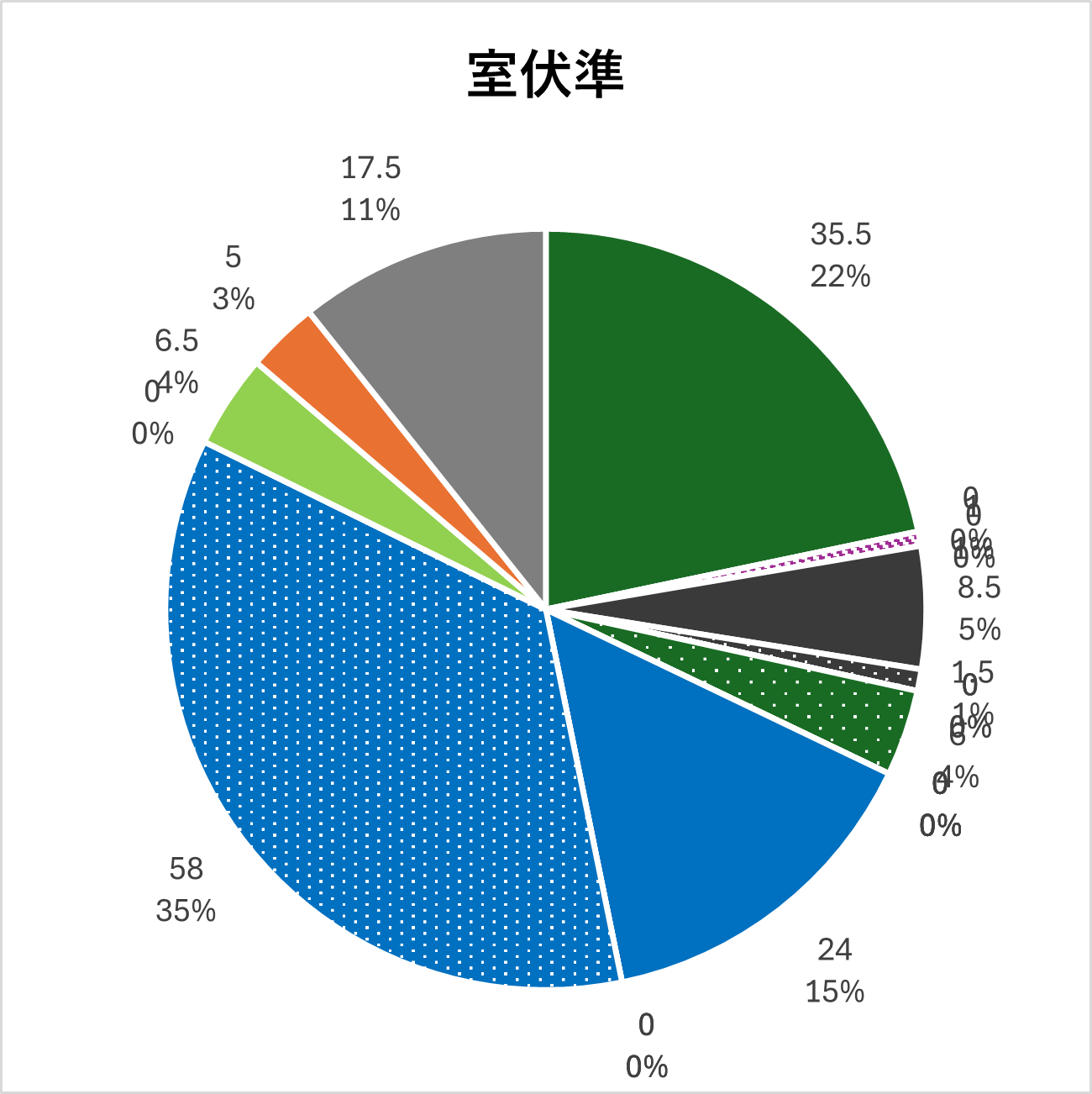
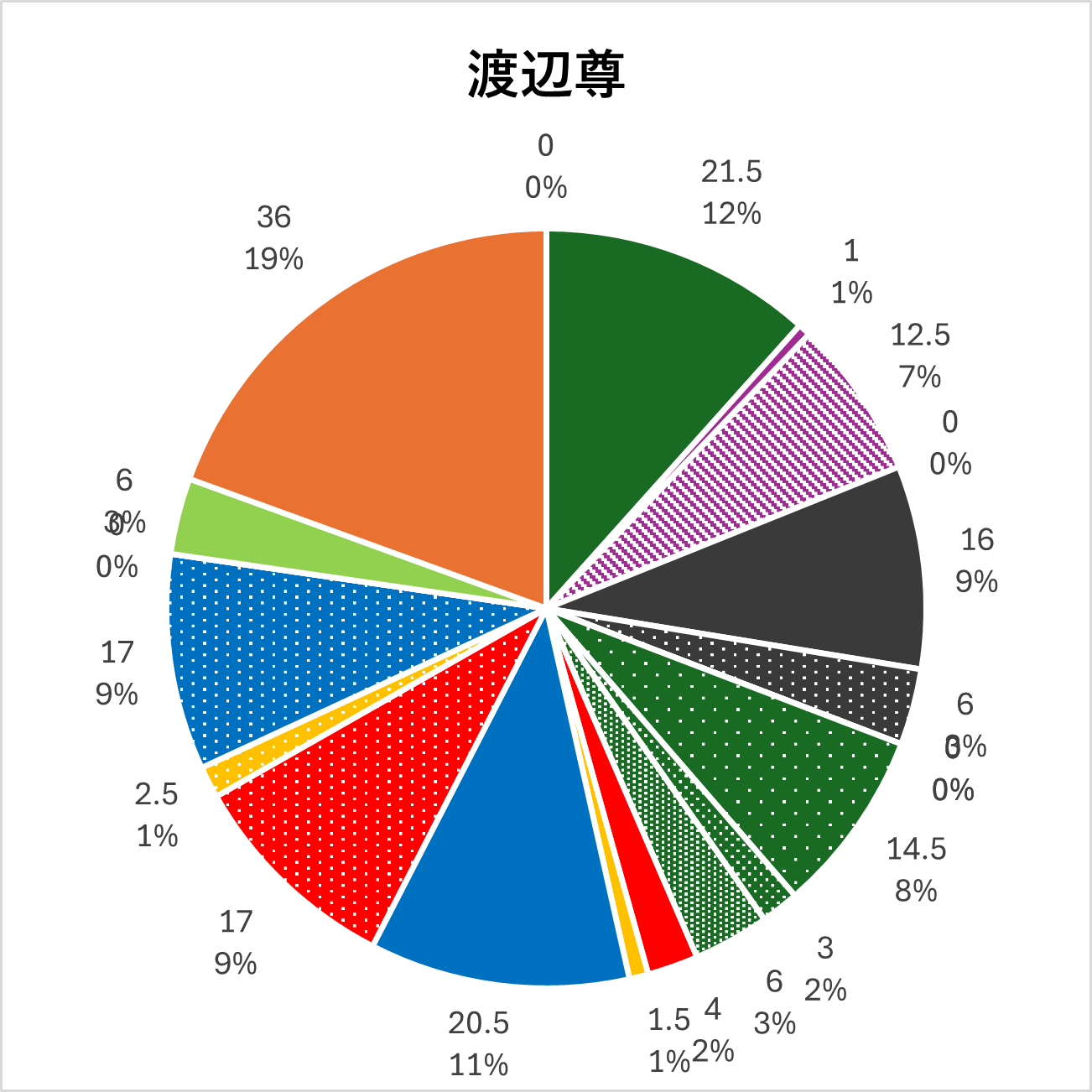
個人別の作業時間のグラフを以下のfig.4からfig.11に示す.このグラフの単位は[時間]である.また,凡例をfig.12に示す.
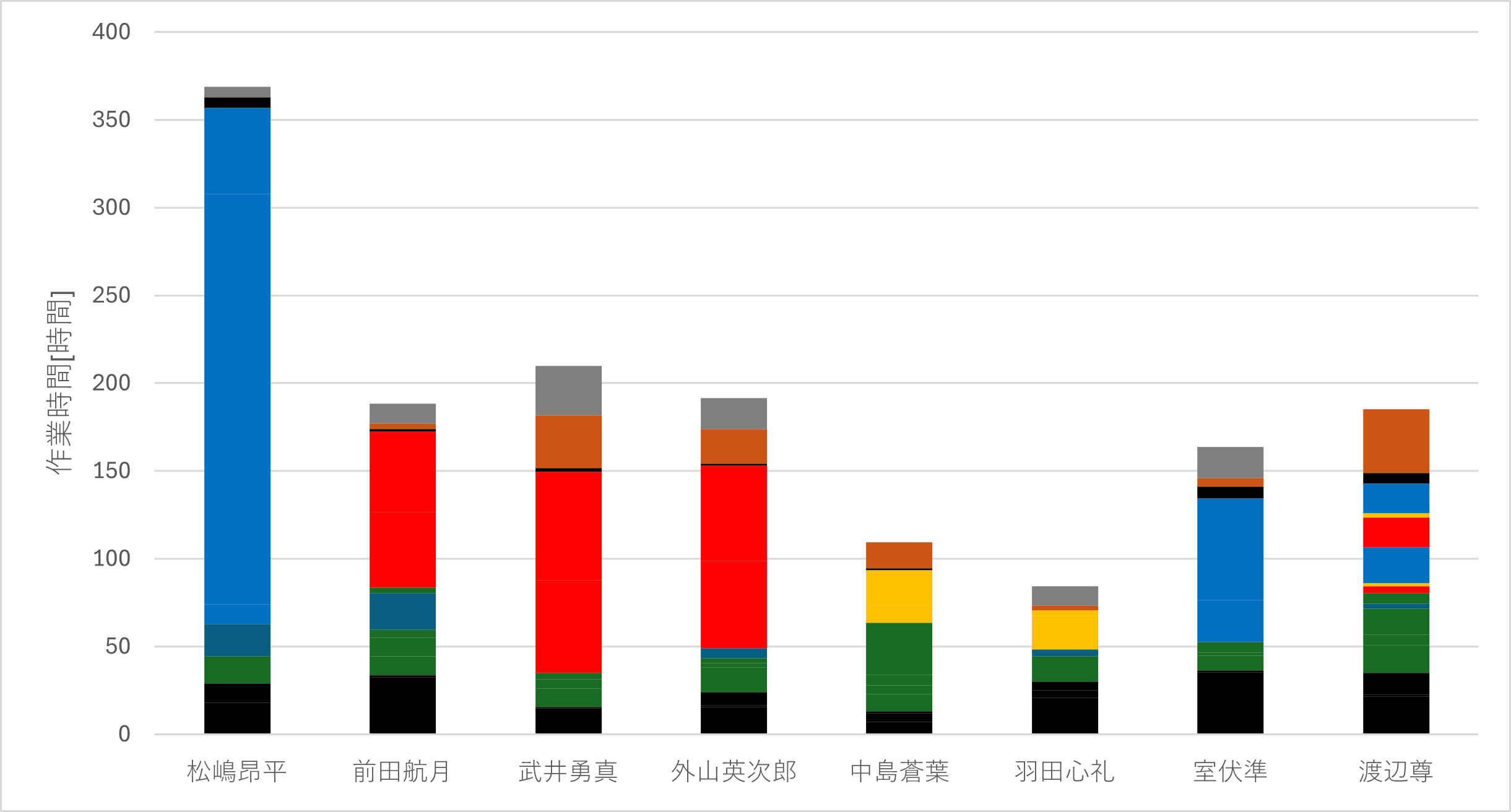
また,個人別の作業時間を比較したグラフをfig.13に示す.
|
|
|
|
|
|
|
|
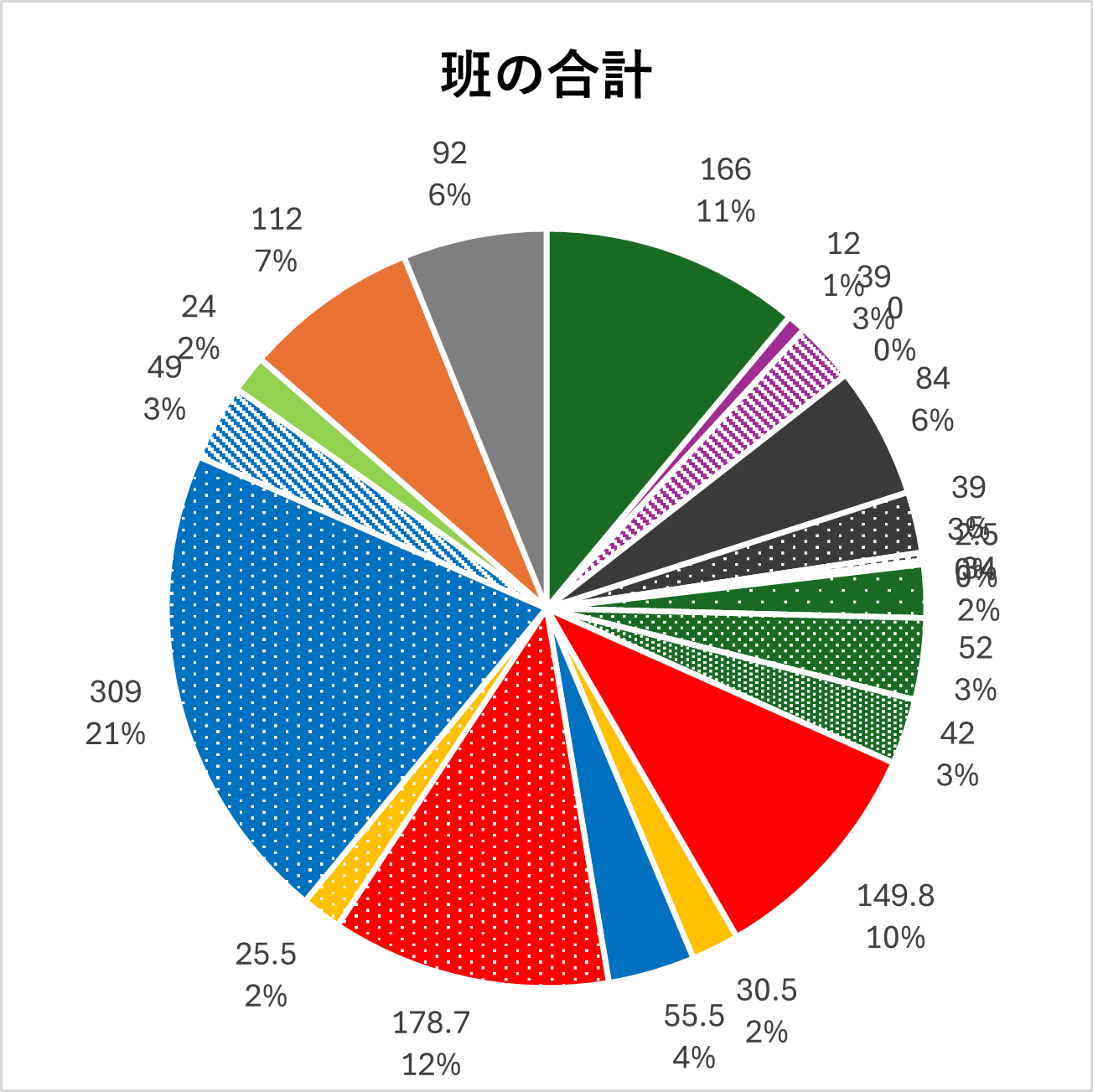
班の合計の作業時間をfig.14に示す.
メカは初期の段階でギアの設計や固定具の設計,加工の工程で計画よりも早め目に進行していた. 一方で,フレームの作成に少し時間がかかり,昇降のための実機の確保が遅れたことで全体の開発を多少圧迫した. ギア等の開発がフレームに比べてスムーズに行ったのは,3Dプリンタを活用したために気軽な試作ができたので改善のサイクルがより早く回ったことが理由と考えられる.
エレキは全体を通して計画よりも遅れるように進行していた. 特に昇降機構はステッピングモータの制御との兼ね合いで変更点が多々あり,これに対応する基板の作成に時間を要した. ESP32のシールド基板はMIRS2024の全体からの提供となったが,そこからの配線は各班のエレキ担当で行われた(11月ごろ). システム統合確認会議の前で昇降機構にまつわる基板の作成が並行して行われ,ここでの作業が最も負担の大きいものだった.
ソフトは機能ごとの進捗に差がみられた. WebやUIについてはおおむね計画通りの進行であったが,自動走行で採用したROS2,Navigation2の実装で遅れがみられ, さらに人員不足となった為に一人に負担が集中した. また,自動音声と生成については早い段階で機能の部分的なところが完成したものの,Webの操作画面と別で開発していたために統合が遅れたと考えられる.
全体の開発工程の総括として,もう一度計画段階でガントチャートを組みなおすということを考えると,
ほとんどの班員は今回のMIRSに近いような形になるというように考えた.
私見を述べると,本年度からMIRSがMG5となり,それに伴って新しくROS2の導入などを進めていった.
ここで,新しく技術を取り入れることには,その技術が使えるのかもわからずに,開発を続けることの厳しさがあるように思う.
実際に,制御体系が変わったことでROSの理解が必須となり,それでもブラックボックスを残したまま開発を進めていくのには恐怖があった.
他の班の成功例が無ければ諦めていただろう,とも思う.
今年度のような新規性の高い開発において,今回のようなV字型の開発モデルには初期段階における要件定義の難しさが挙げられると思う.
新しいことを取り入れることで前の要件定義から外れてしまうということの繰り返しで,実際に機体の完成までに詳細設計は完了しなかった.
このような場合にはまず新しい技術開発を初期段階でやりきってから改良を基本に作り上げていくアジャイル型の開発が望ましいと思う.
また,今回の開発の個人的な経験を基に述べると,開発工程や進捗は外乱に脆弱であるために全体で「安全」な開発への取り組みが重要になるように感じた.
班員の所感を以下に示す.