 |
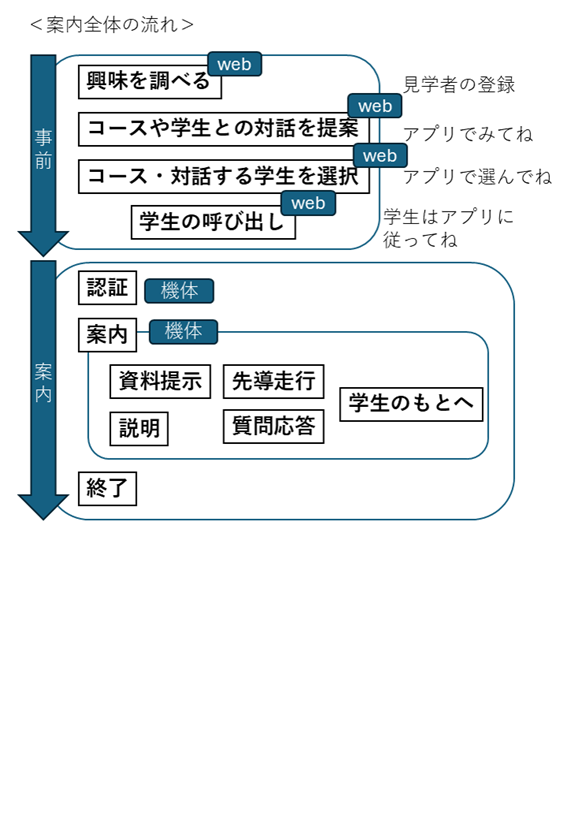
| fig.1 案内全体の流れ |
| 名称 | MIRS2401 基本設計書 |
|---|---|
| 番号 | MIRS2401-DSGN-0002 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2024.08.20 | 松嶋昂平 | 初版 | |
| A02 | 2024.08.22 | 松嶋昂平 | 青木悠祐 | 機能、性能を基本設計書に対応した書き方に修正 fig2に説明を記入、エレキ基本接続図を修正 ソフトウェア機能の分類の修正 ガントチャートの修正 購入物品表に購入確定の欄を津発 |
| A03 | 2024.08.20 | 松嶋昂平 | 青木悠祐 | 購入予定物品票の変更 |
|
| fig.1 案内全体の流れ |
GAPlessの全体像を以下に示す。ギヤードモータと定荷重ばねを四隅に配置することにより昇降を行う。
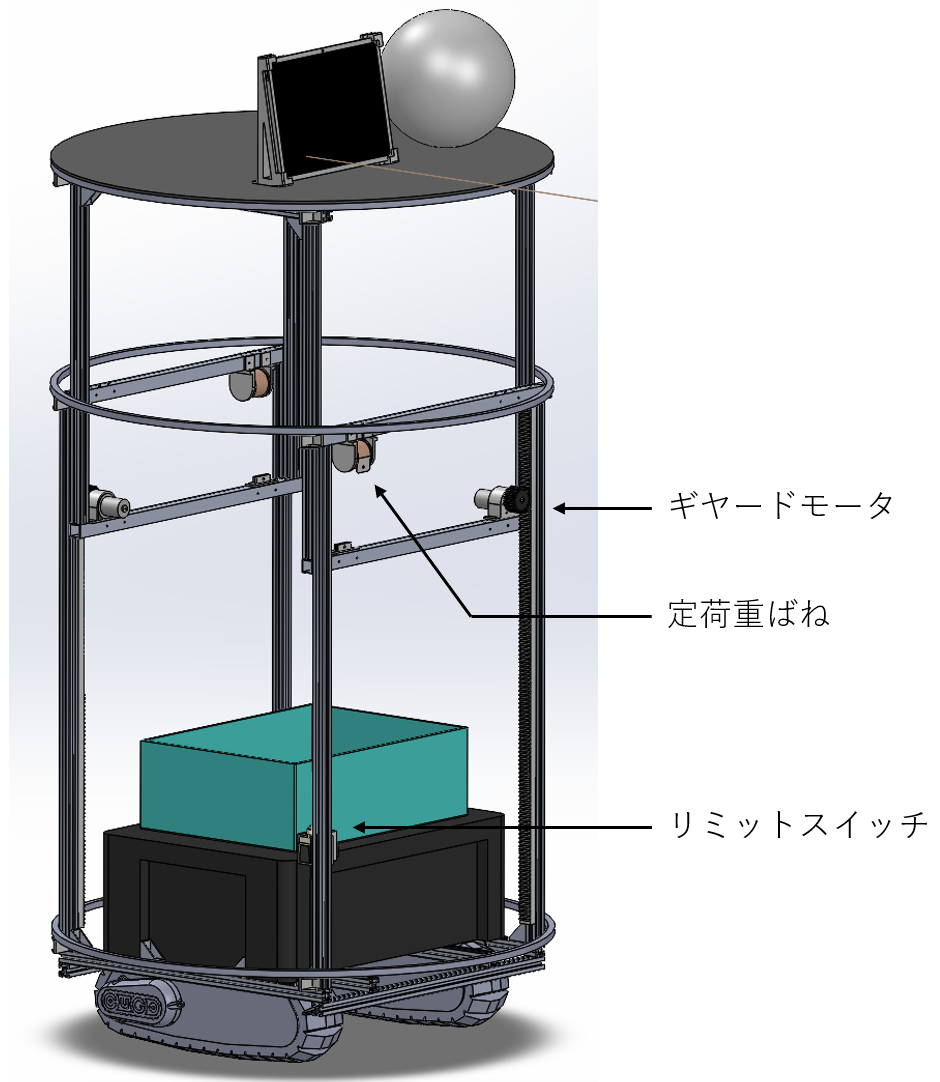 |
| fig.2 全体図 |
アルミ角パイプとアルミフレームを用いてフレームを作成し、各固定器具は3Dプリンタで作成する。天板はプラスチック段ボールを使用し、外側全体をフェルトで覆う。
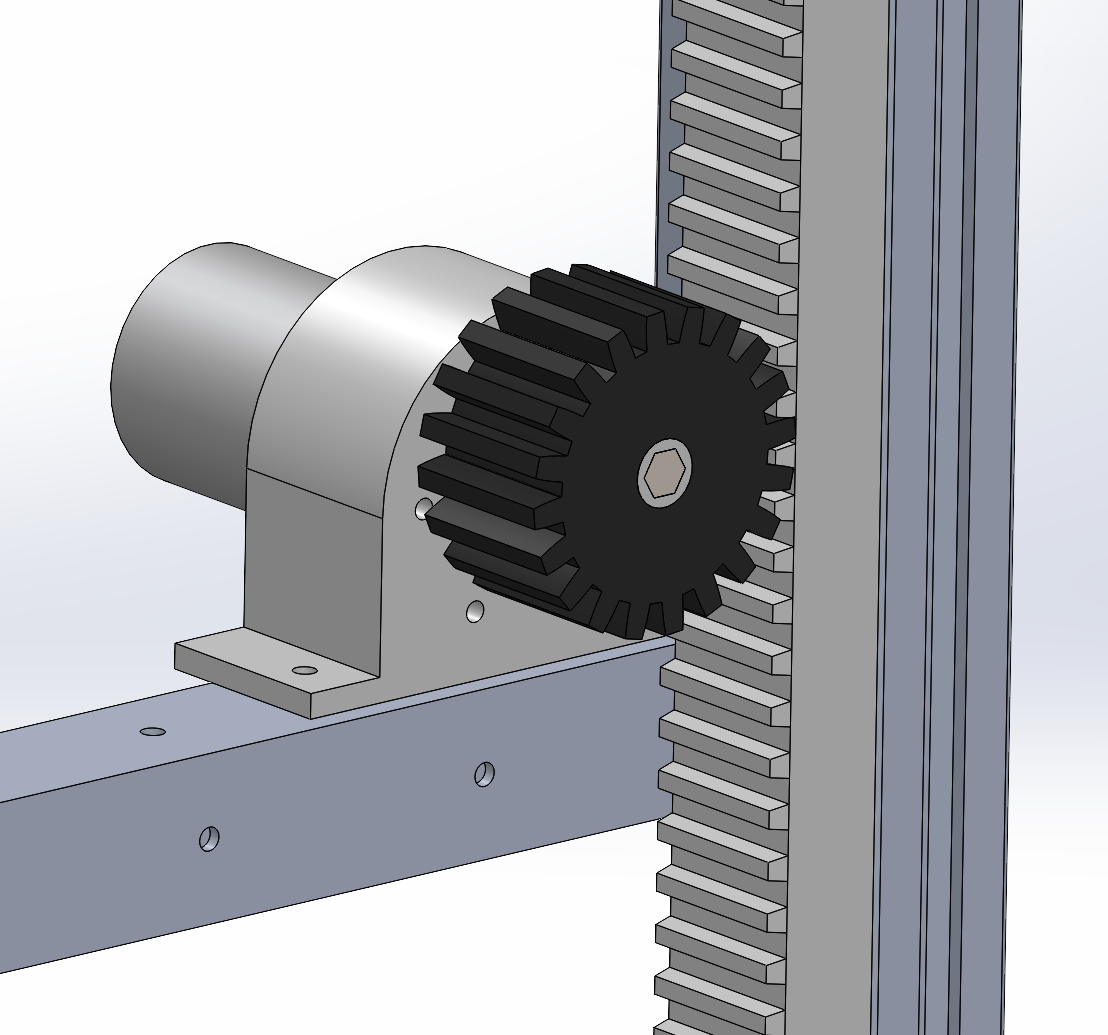 |
| fig.3 ギヤードモータ全体図 |
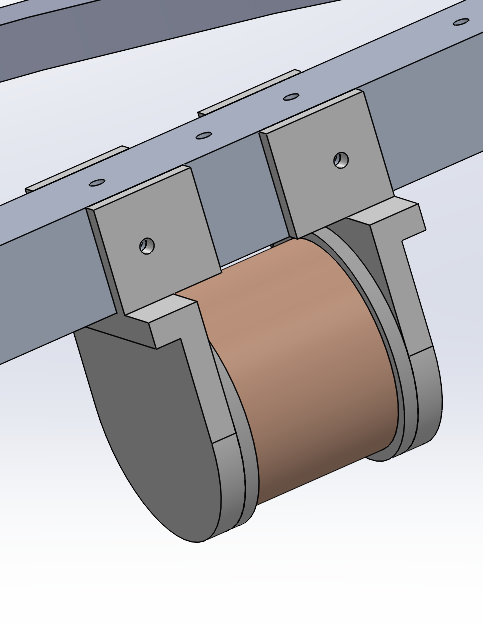 |
| fig.4 定荷重ばね |
 |
| fig.5 リミットスイッチ |
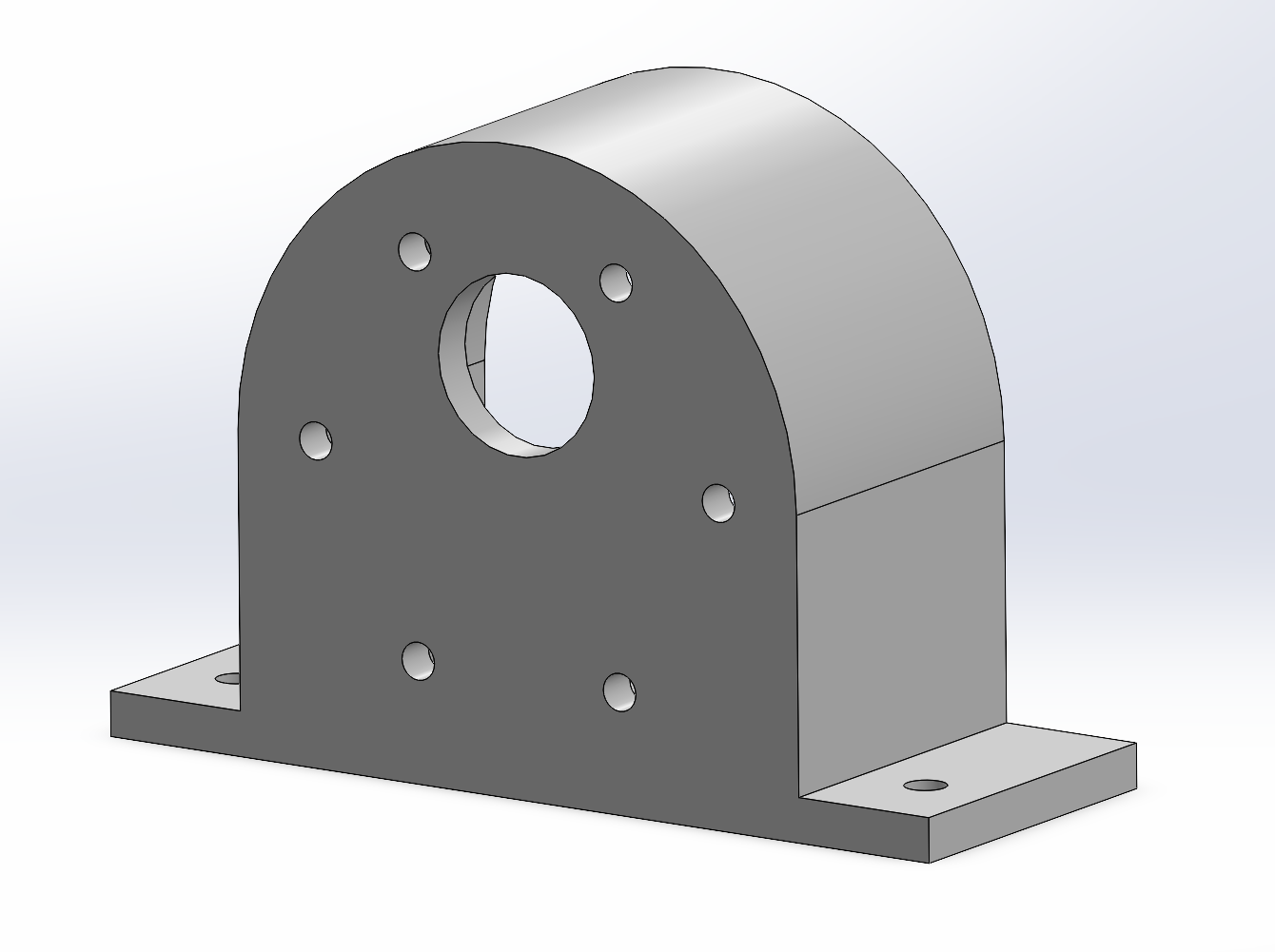 |
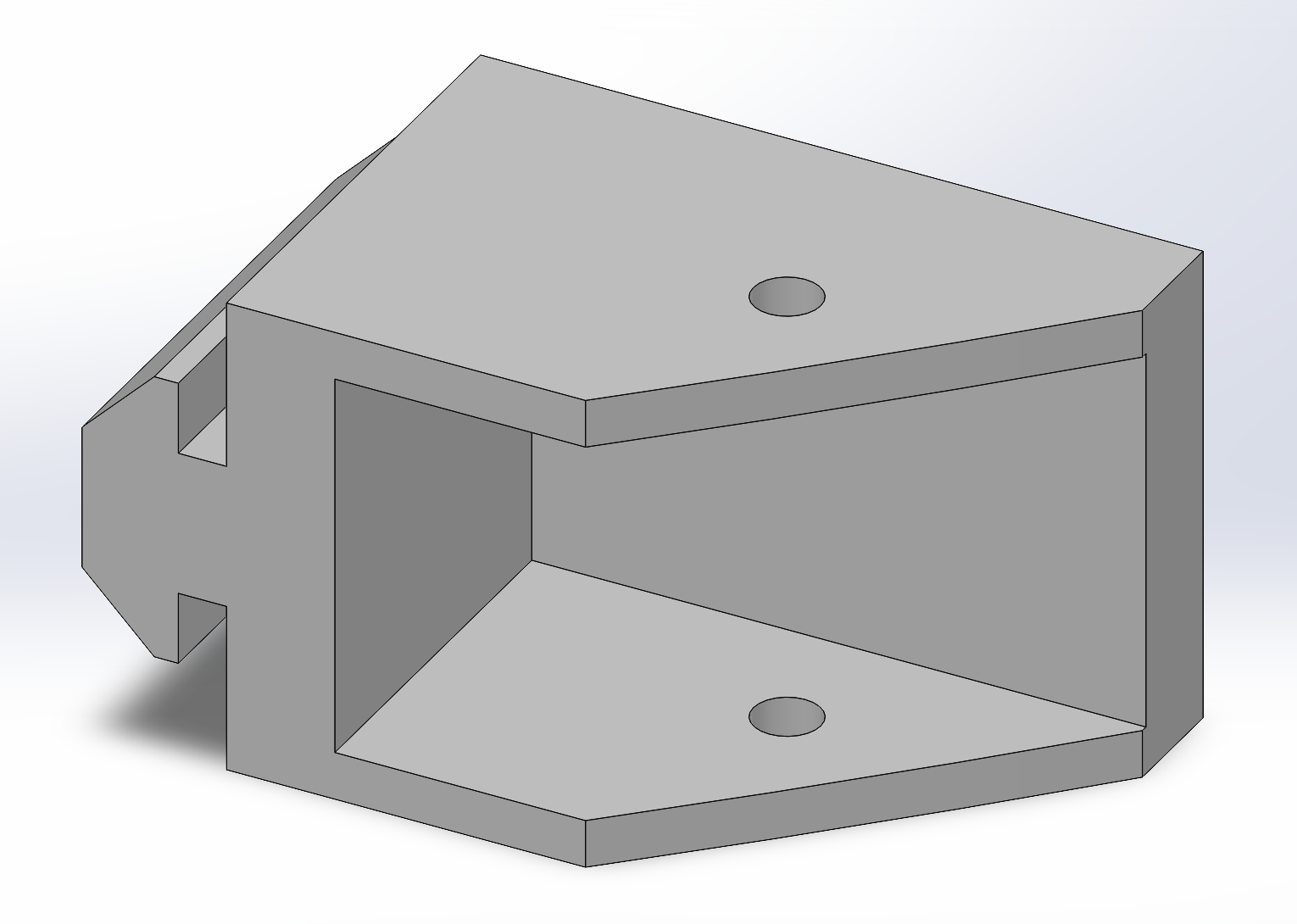
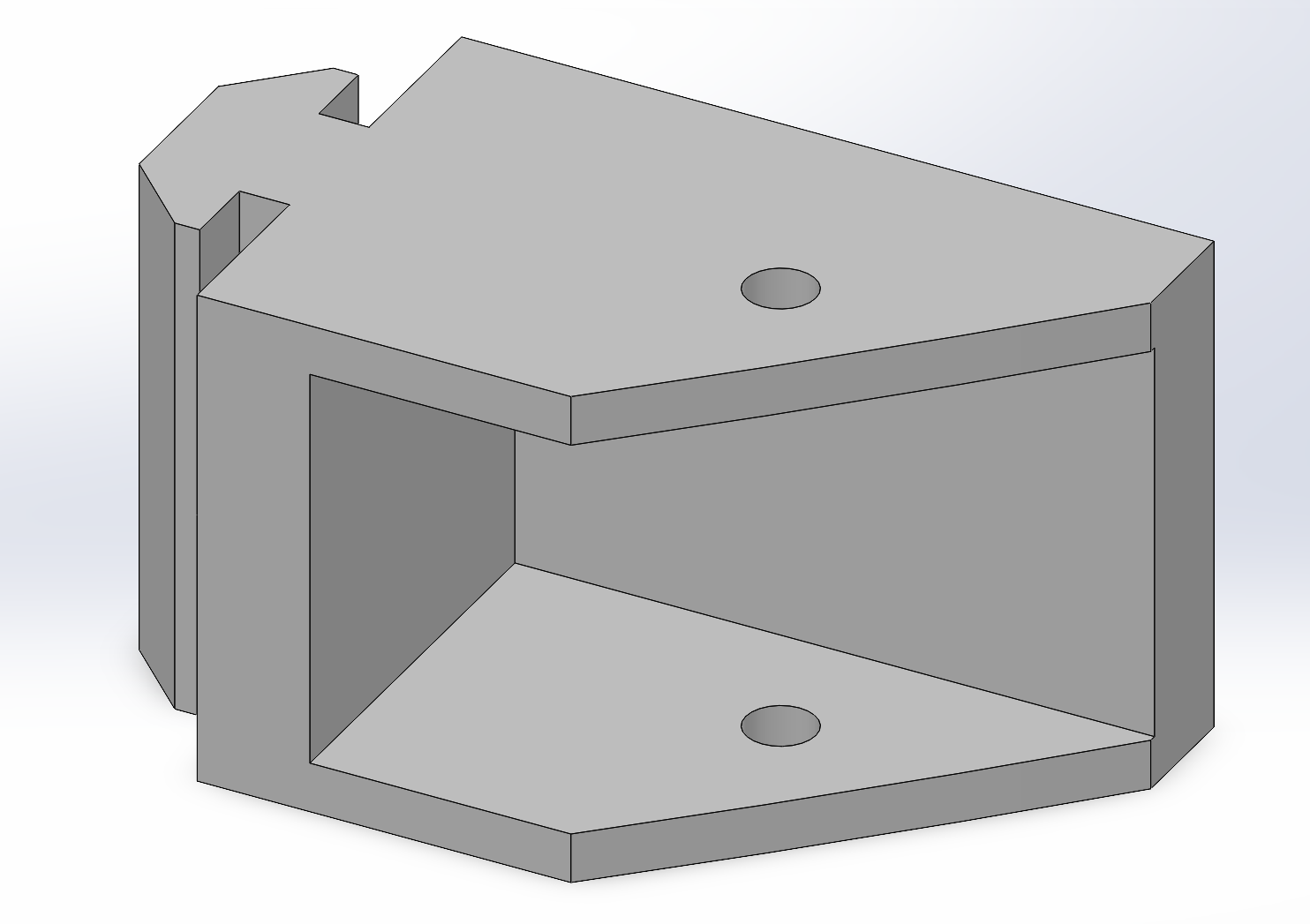
| fig.6 ギヤードモータ固定器具 |
 |
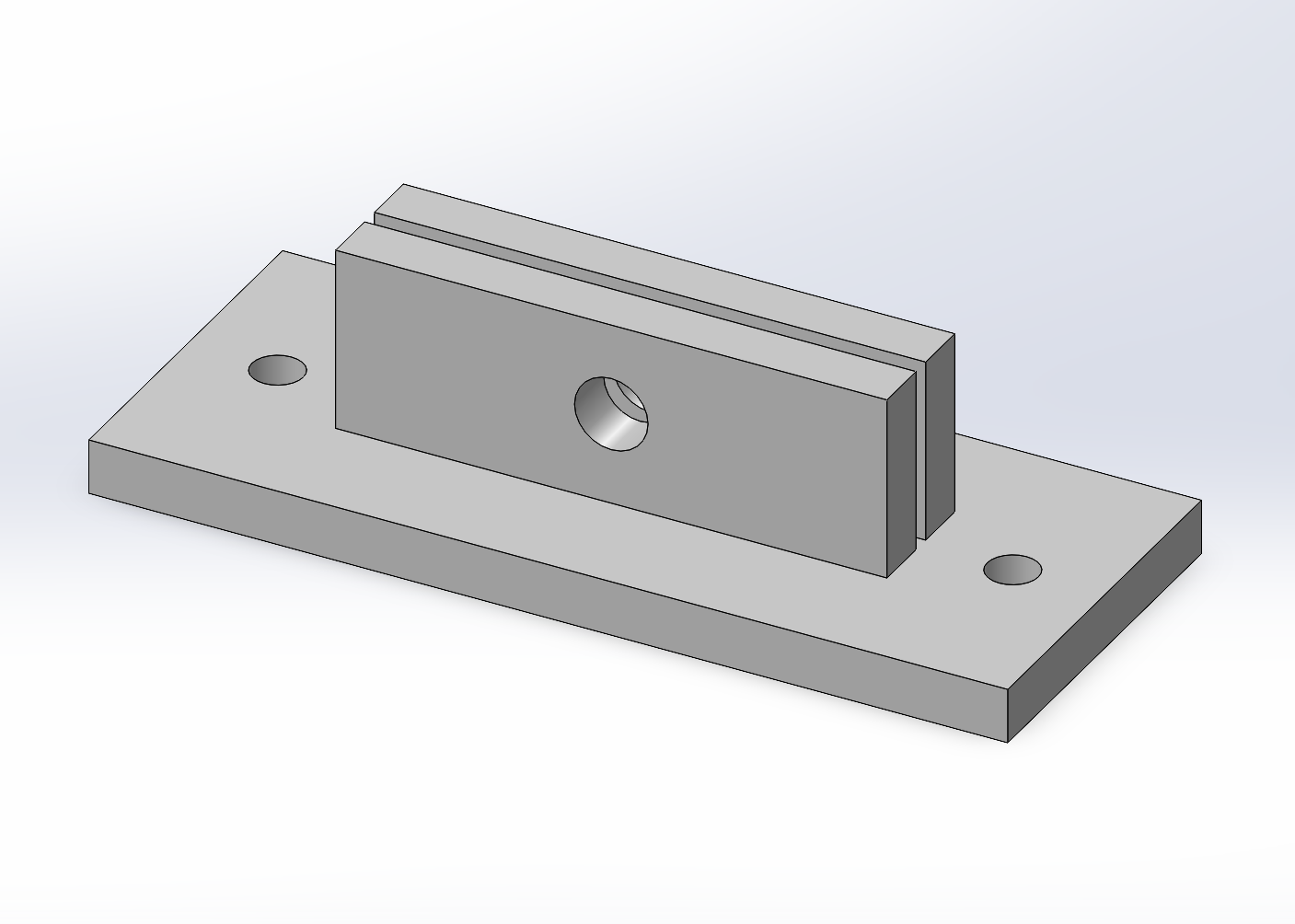
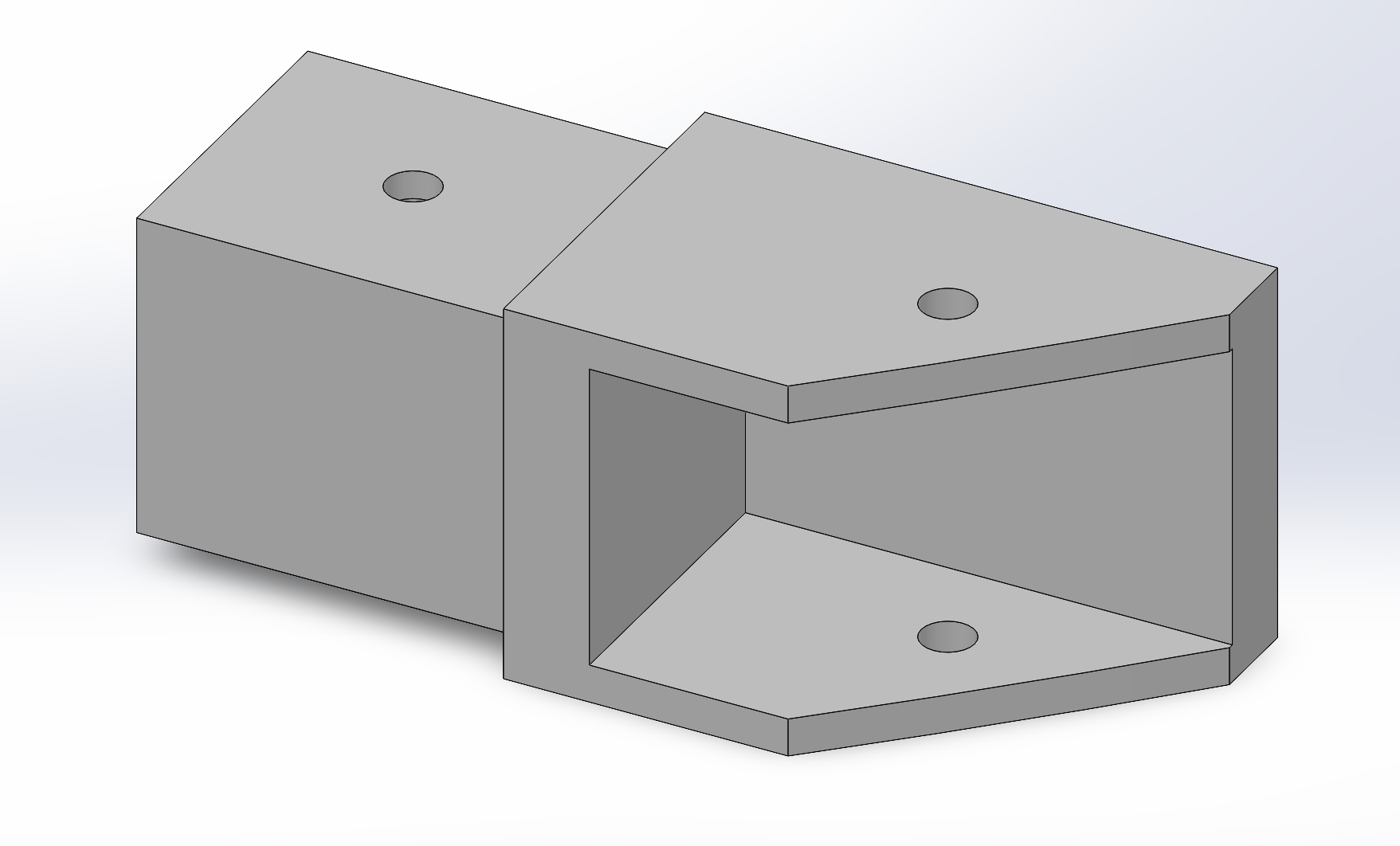
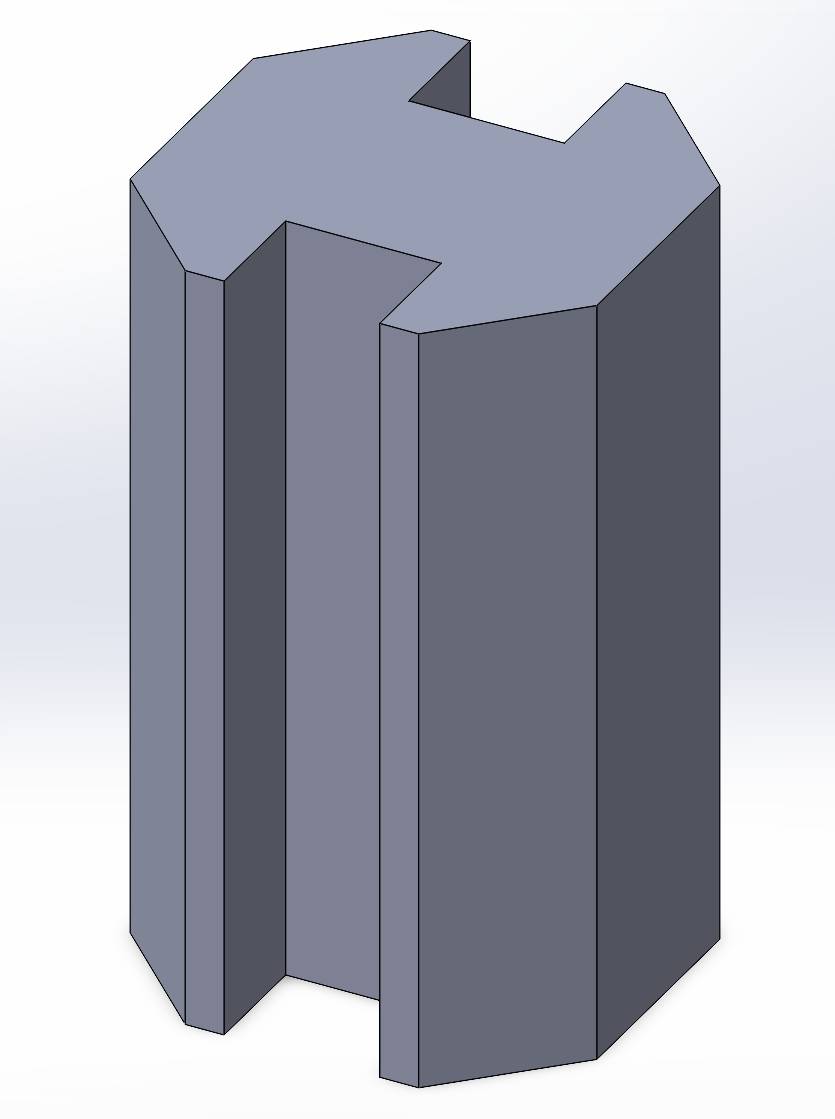
| fig.7 定荷重ばね固定器具 |
 |
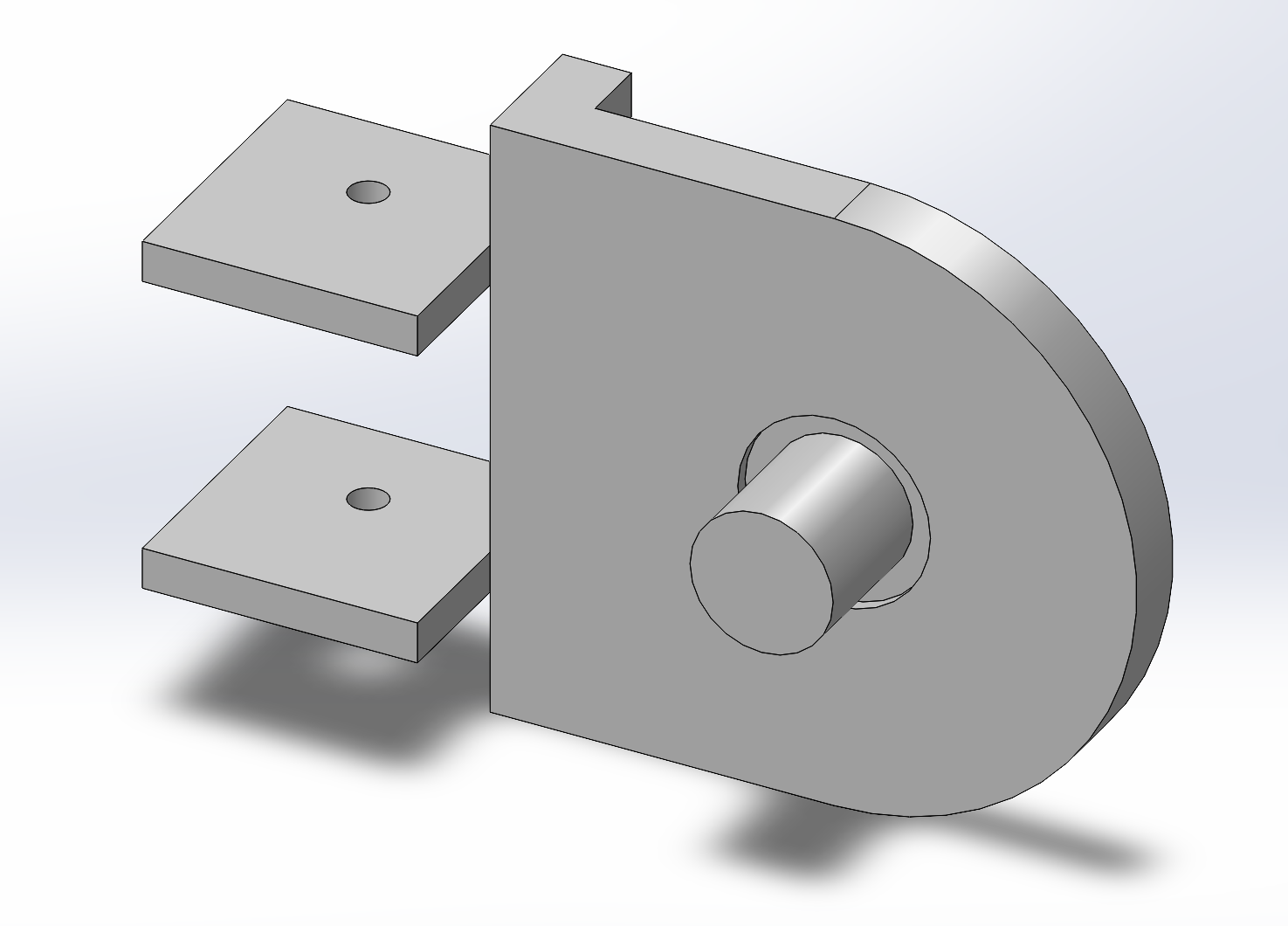
| fig.8 定荷重ばね端固定器具 |
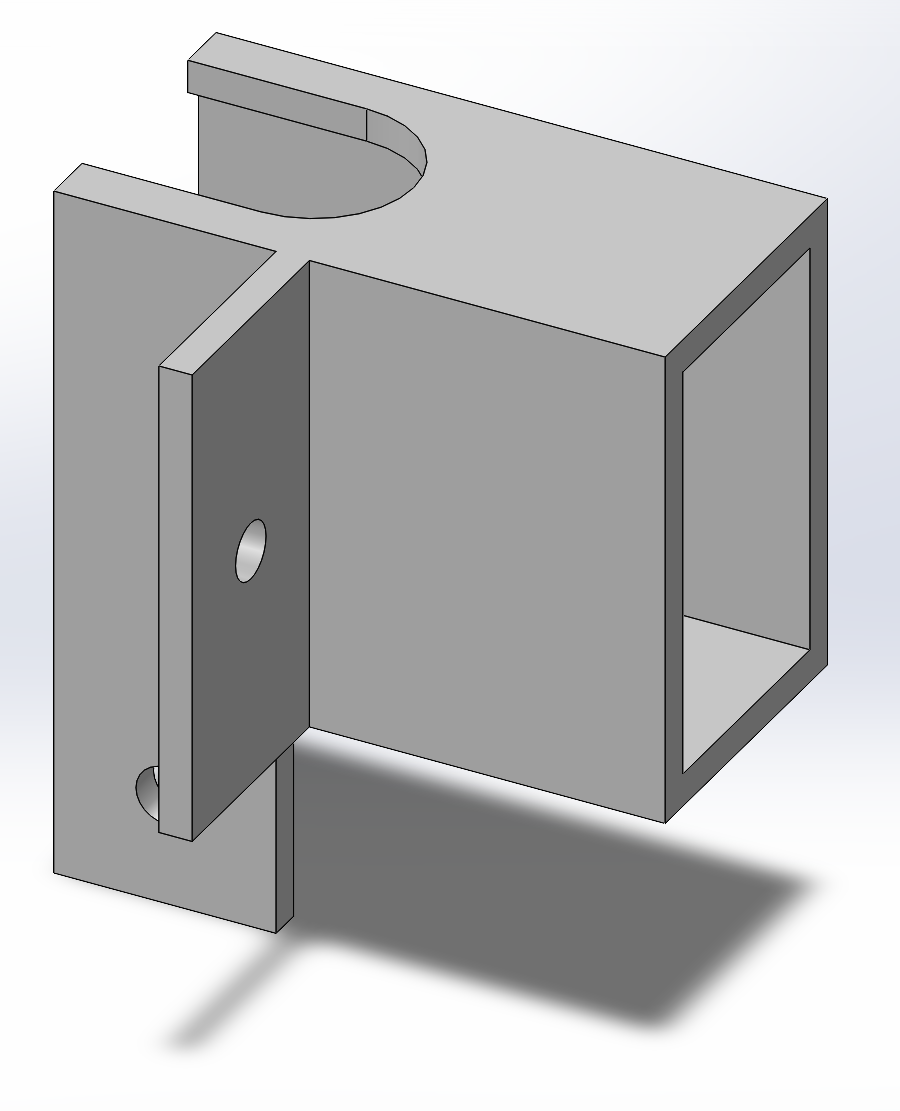 |
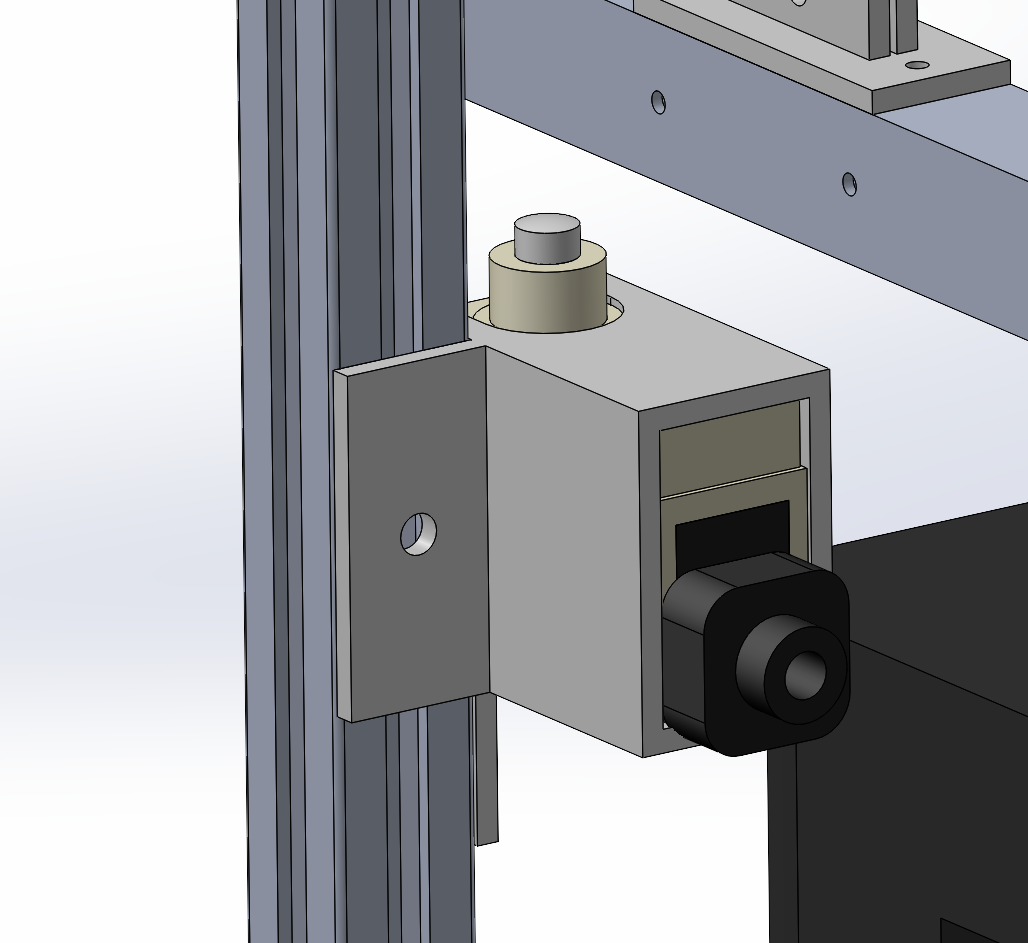
| fig.9 リミットスイッチ固定器具 |
 |
| fig.10 ディスプレイ固定器具 |
 |
| fig.11 上段フレーム固定器具 |
 |
| fig.12 中段フレーム固定器具 |
 |
| fig.13 下段フレーム固定器具 |
 |
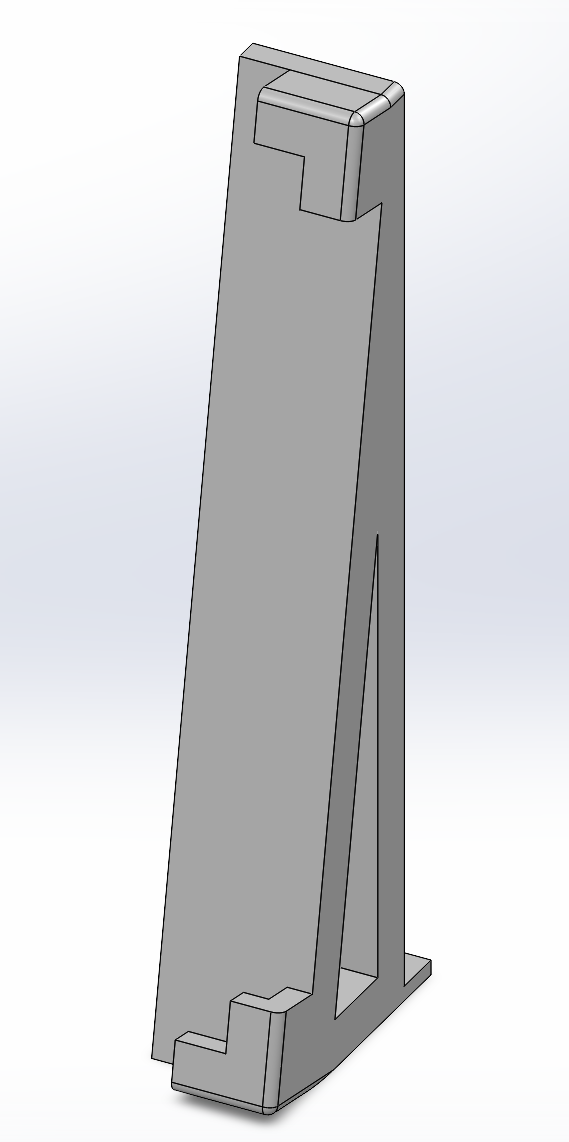
| fig.14 上下フレーム抑制器具 |
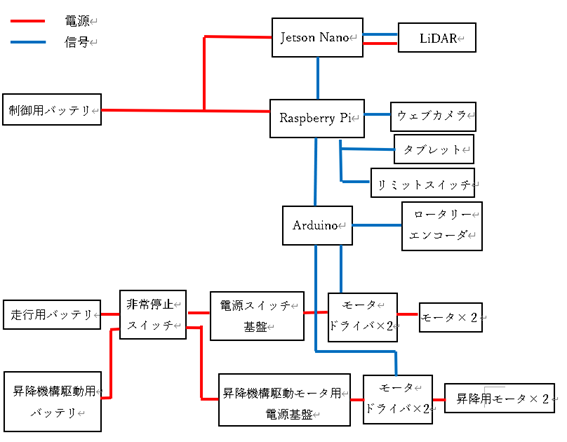 |
| fig.15 基本接続図 |
| 供給元 | 供給電源電圧 | 供給先 |
|---|---|---|
| 制御用バッテリ | 5.0V | Raspberry Pi |
| 駆動用バッテリ | 24.0V | モータドライバ |
| 昇降機構用バッテリ | 7.2V | モータドライバ |
| 名称 | 使用用途 |
|---|---|
| 緊急停止スイッチ | 緊急時にロボットを強制停止させる |
| タブレット | ロボットの動作指示・遠隔コミュニケーション |
| 名称 | 使用用途 | 接続,通信 |
|---|---|---|
| 走行用モータ | 目的地への移動をする | PWM |
| LiDAR | 周囲の情報を取得する | USB |
| WEBカメラ | 周囲の情報を取得する | USB |
| モータドライバ | モータの制御を行う | PWM |
| ロータリーエンコーダ | 位置・速度測定 | デジタルI/O |
| リミットスイッチ | 物体の位置を検出する | デジタルI/O |
| 名称 | 使用用途 |
|---|---|
| 昇降用モータ | タブレットの高さ調整を行う |
| モータドライバ | モータの制御を行う |
| 機能区分 | 小分類 | 詳細 | 動作環境 |
|---|---|---|---|
| マッチング機能 | ユーザー登録(在校生、学校関係者、見学者) | ユーザーを登録する。在校生、見学者は使用する情報の登録も行う | W |
| 在校生の登録、削除 | (在校生)自分が見学者と相手ができる時間を登録、削除する | W | |
| 在校生提案 | 登録された情報に基づき、適切な在校生を提案する | W | |
| 会話予定の締結 | 対話を希望する在校生を選択し、予約を登録する | W | |
| 在校生呼び出し(メール) | 在校生に対し、会話予定の締結や呼び出しをgmailで通知する | W | |
| 志望者同士のマッチング | 予定を合わせて合同での見学をできるようにする | W | |
| コミュニケーション機能 | 音声認識 | マイクから質問を認識する | J |
| 質問への返答生成 | 認識した質問に対してAIサービスのAPIを用いて回答を生成する | J | |
| 回答の読み上げ | 生成された回答から音声を合成し、スピーカーから出力する | J | |
| 高さ調節 | 使用者のディスプレイ操作から上下機構のステッピングモータを操作する | A,R | |
| 資料提示 | 質問内容、案内の内容に関連する補足資料などをディスプレイに表示する | R | |
| ナビゲーション機能 | 見学者の先導 | スラム走行、一部オドメトリによる走行で見学者の先を走行し目的地まで案内する | A,J |
| 見学場所の登録、削除 | (在校生、学校関係者)見学できる場所、イベントとその属性(関連する学科、内容の特徴)登録、削除する | W | |
| 見学場所の提案 | 登録されたユーザーの情報と属性に基づき、興味ありそうな見学場所を提案する | W | |
| 見学場所の予約 | 希望する見学場所を選択し、予約を登録する | W | |
| ルート生成 | 予約情報に基づき走行コースを決定する | R | |
| ユーザーの認証 | ユーザー本人であることをディスプレイでメールアドレスとパスワードから認証する | R | |
| エレベータ同乗 | スラム走行でエレベーターに乗り込む(ボタンは人間が押す) | A,J | |
| 安全対策機能 | 衝突回避 | スラム走行で障害物の回避して走行する | R,J |
| 使用方法の提示 | 案内開始前に使用方法、緊急時対応の情報を提示する | R | |
| 遠隔操作、停止 | WEBアプリから遠隔で移動、操作、停止を行う | R | |
| WEBアプリとの接続 | 機体本体へのデータの提供 | 予約状況をもとに移動する時間、位置をロボット本体へ提供するAPIを実装する | W |
| 物品 | 販売ページ | 使用用途 | 単価(税込) | 個数 | 小計 | 購入確定 |
|---|---|---|---|---|---|---|
| プラスチックカゴ | カゴ販売ページ | 荷物置き | 1,199円 | 1個 | 1,199円 | |
| プラスチック段ボール | プラスチック段ボール販売ページ | 天板 | 1,529円 | 1個 | 1,529円 | |
| 定荷重ばね CFS3.2 | 販売ページ | 昇降用 | 2,640円 | 2個 | 5,280円 | ギヤードモータ | モータ販売ページ | 昇降用 | 5,498円 | 2個 | 10,996円 |
| リミットスイッチ | スイッチ販売ページ | 昇降判定用 | 2,498円 | 1個 | 2,498円 | |
| Wi-Fiルーター 無線LAN アダプタ 433Mbps 11ac USB2.0 | モノタロウ販売ページ | jetson nano開発、運用 | 2,650円 | 1個 | 2,650円 | 決定 |
| USB typeC-HDMI変換ケーブル(2.0m) 4K対応30Hz | モノタロウ販売ページ | IPadのディスプレイ化 | 1,591円 | 1個 | 1,591円 | 決定 |