本ドキュメントはMIRS2304の開発完了報告書である。完成した機体を以下に示す。

図1-1.PETBOT
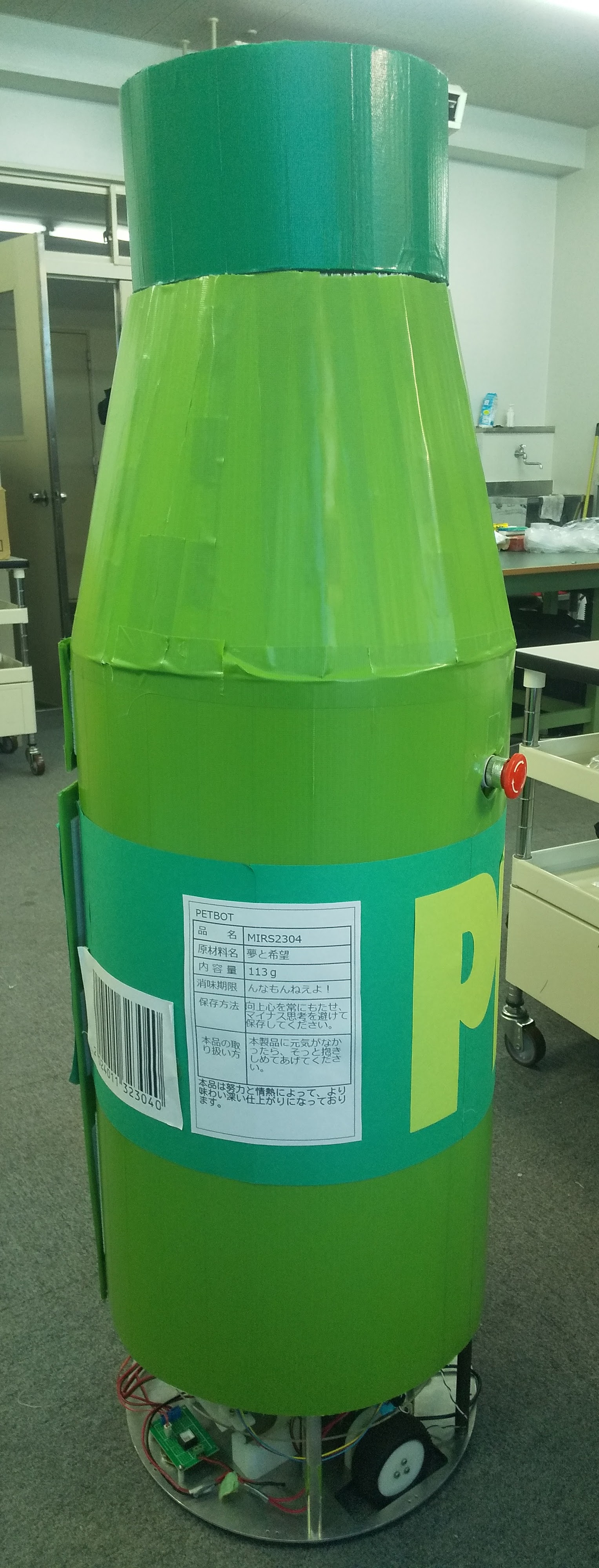
図1-2.PETBOT背面

図1-3.PETBOT内部

| 名称 | MIRS2304開発完了報告書 |
|---|---|
| 番号 | MIRS2304-REPT-0002 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2024.01.29 | 杉山珠里, 野村洸達, 長岡さゆり, 中野光稀, 遠藤泰介, 國嶋悠悟, 林煌之助, 上野晴瑚 | 初版 | |
| A02 | 2024.02.22 | 杉山珠里, 野村洸達, 長岡さゆり, 中野光稀, 遠藤泰介, 國嶋悠悟, 林煌之助, 上野晴瑚 | 青木 |
第2版 円グラフを修正 |
本ドキュメントはMIRS2304の開発完了報告書である。完成した機体を以下に示す。
図1-1.PETBOT
図1-2.PETBOT背面
図1-3.PETBOT内部
機体評価を表2-1に示す。
表2-1 機体評価
| 機能名称 | 概要 | 評価 |
|---|---|---|
| 自動運搬機能 |
ペットボトルの投入量を把握し、規定値を超えたら自律走行でエレベータを用いて指定された集積所へ持っていく。 その際に、超音波センサで周囲の障害物を認識する。 |
自立走行により、エレベーターのボタン前までの移動を行えた。 目標としていたボタン押下とエレベーターの乗車まで、社会実装実験で実演することができた。 |
| ゴミ品質の向上機能 |
ペットボトル投入口には二枚の投入防止板を設ける。 超音波センサで認識することにより、キャップとペットボトルの分別判断をする。 |
分別防止板により、分別されていないペットボトルを入れられないようにできた。 また、センサ認識で明るい色のラベル,ボトル,キャップ,飲み残しの判別を行えた。 水や透明なラベルでは誤判断が見られた。 |
| 状態表示機能 | スピーカー,LEDでロボットの状態を知らせ、周囲に対して注意喚起を行う。 | 音声とLEDによる状態遷移通知を行うことができた。 |
発表会における結果は以下の通りである。
総合順位1位
得票数 67,得票率 33.3%
発表会では、野村が発表を担当した。
ステージ上での実演やPETBOTの発表参加により、プレゼン終了時点で多くの票を獲得することができた。
ブース展示では実際に来場した方々に体験してもらうことで日常で使う場面をイメージしやすくなったと考えられる。
基本設計時点での開発スケジュールを図4-1に,実際の開発スケジュールを図4-2に示す。
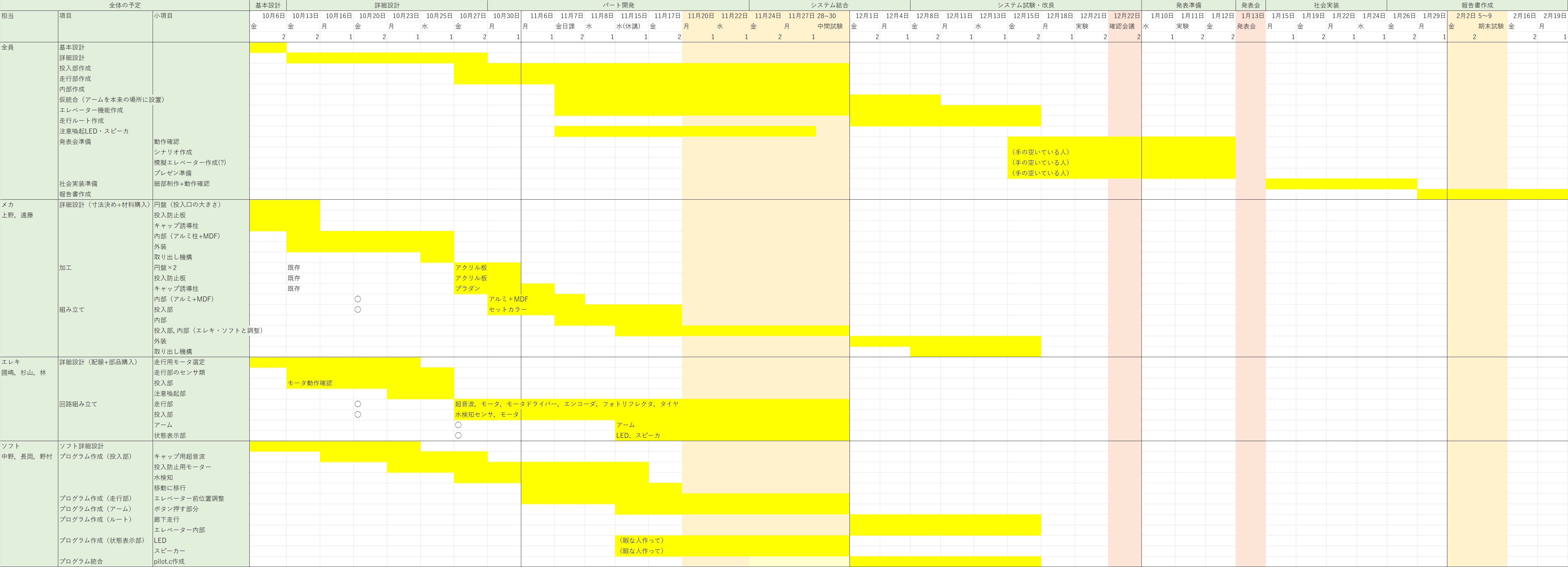
図4-1.基本設計時点の開発スケジュール
図4-2.実際の開発スケジュール
各班員の作業時間の割合を以下に示す。
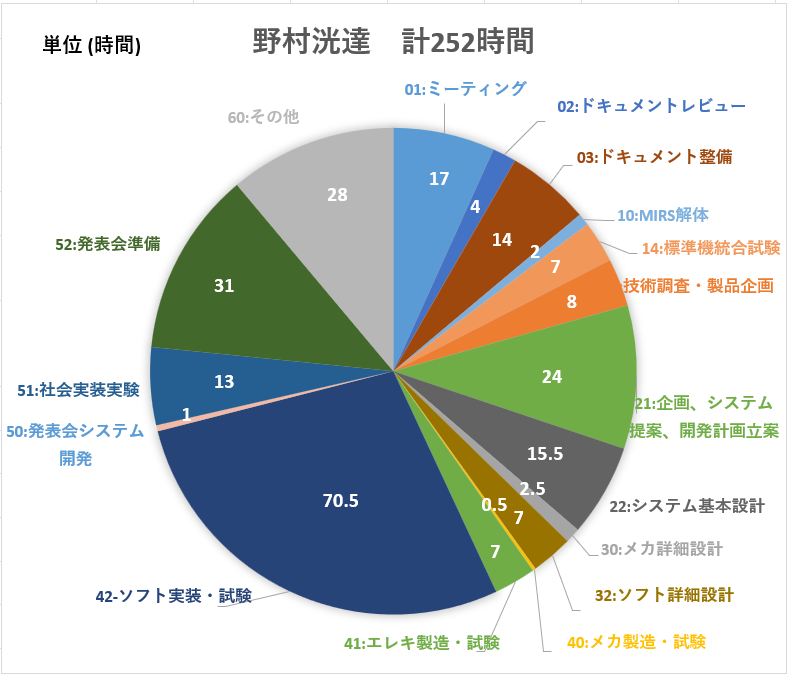
図4-3.作業時間割合(野村)
図4-4.作業時間割合(國嶋)
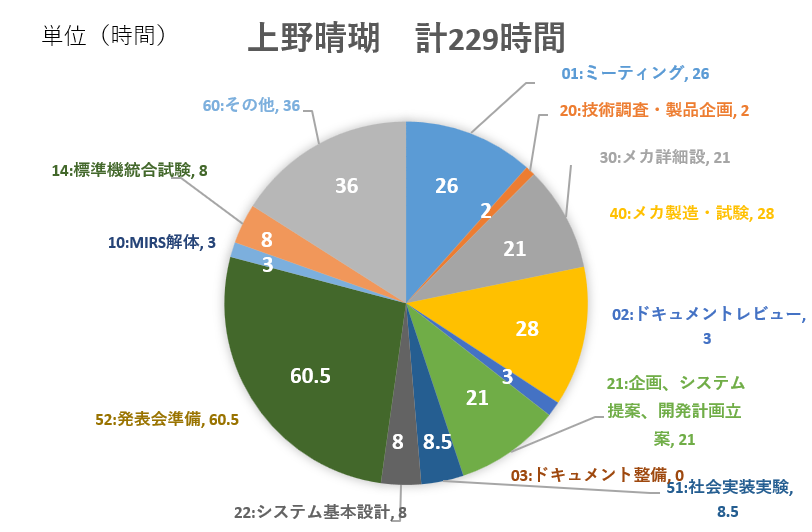
図4-5.作業時間割合(上野)
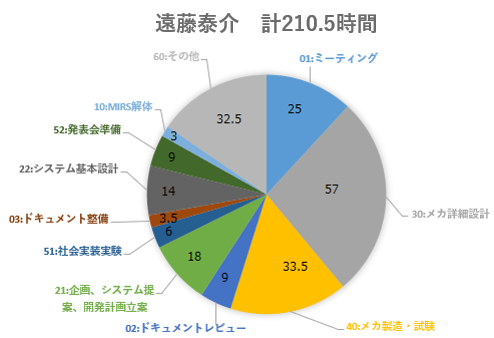
図4-6.作業時間割合(遠藤)

図4-7.作業時間割合(杉山)

図4-8.作業時間割合(長岡)
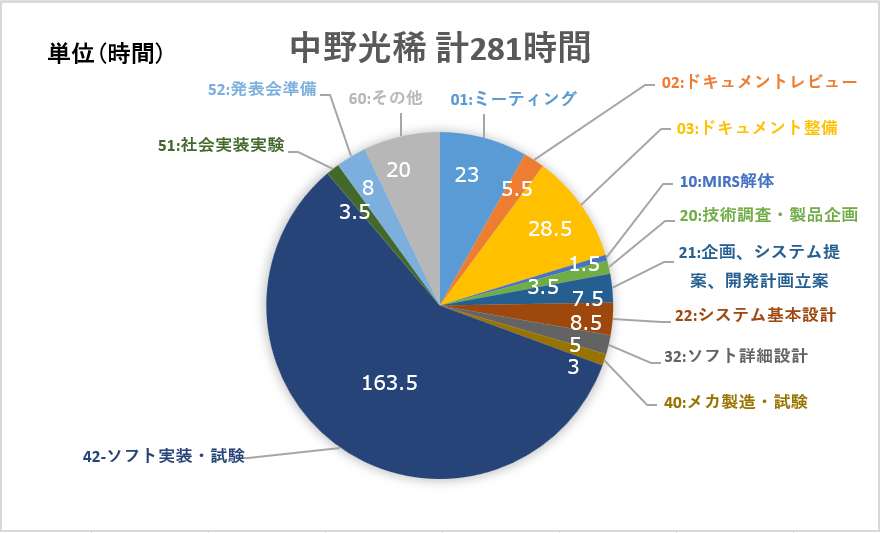
図4-9.作業時間割合(中野)

図4-10.作業時間割合(林)
各パートの作業時間の割合を以下に示す。

図4-11.作業時間割合(メカ)
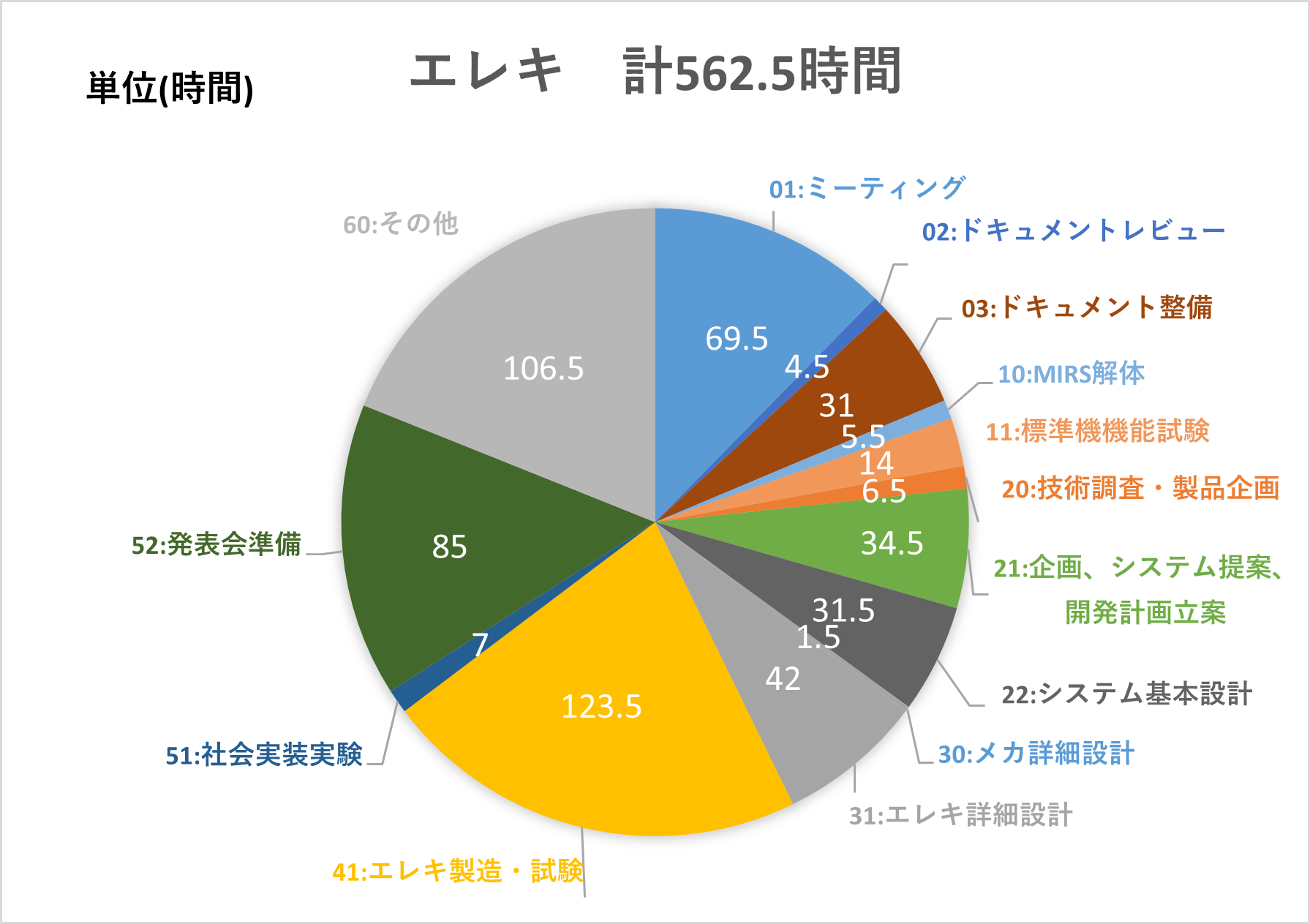
図4-12.作業時間割合(エレキ)

図4-13.作業時間割合(ソフト)
各パートの平均作業時間を表4-1に示す。
表2-1 各パートの平均作業時間
| パート | メカ | エレキ | ソフト |
|---|---|---|---|
|
|
|
|
|
各パート毎の分析を以下に示す。
割合的に一番多いのはメカ詳細設計であり、次に多いのは発表会準備であった。これは詳細設計の際SOLIDWORKSでMIRS全体を設計した際に使用になれるのに時間がかかったためと考える。また、細かなパーツは共同して作成していたが、合致は遠藤が一人で担当していたため割合が多くなった。
上野はSOLIDWORKSでの設計に遠藤よりも貢献できずその分レーザ加工、3Dプリンターによるパーツ作成等部品の加工をメインに貢献していたためメカ製造・試験の割合の方がメカ詳細設計の割合よりも大きくなった。
1月以降はメカの仕事が減少したため、その分発表会の準備等に2人とも貢献していた。よって他よりも発表会準備の割合が大きくなっていると考える。
それぞれで役割を持ち分担して作業を行っていたため仕事量に偏りを感じることがあったが、決められた期日には仕事を終えられていることが多かったため適材適所に仕事を割り振れたのではないかと考える。
割合を見るとエレキ製造・試験が一番多くなっている。MIRS製作途中使用するセンサの変更・追加が何度かあったこと、モータ線などの断線の修復作業があったことが主な要因だと考えられる。
林が発表会用のPVの作成を行っていた。そのため発表会準備の割合も多くなっている。
杉山がポスター作製や外装作成なども中心的に行っていた。そのためその他の割合も多くなっている。
メカやエレキの手伝いを少しした。これはメカやエレキが終わるまでソフトが実装できないため、手が空いたソフトが手伝っていた。
割合的に一番多いのはソフト実装・試験である。これは中野が1人で冬休みにやっていたため割合が大きくなっている。しかし、ソフトの実装をしながらメカやエレキの不具合を直していたため、実際の割合はもう少し減っていると考えられる。
野村が1月に入ってからは、ほとんどプレゼン練習をしていた。そのため発表会準備の割合も多い。
長岡がポスター作製や外装作成なども中心的に行っていた。そのためその他の割合が多くなっている。
全体のスケジュール管理についての分析を述べる。
開発が予定より大幅に遅れた理由について、PETBOTの機能の多くが組み上がってからでないと実装が難しいものであったことが挙げられる。具体的には、ペットボトルの分別判断機能やエレベーターの乗降機能などである。そのため、中間試験明けまで組み立てに入れなかったことが、全体の遅延に繋がったと考えられる。
また、詳細設計段階でセンサの仕様やロボットの使用感を吟味せずに進めてしまっていた。そのため、設計のやり直しが何度も発生してしまっていた。作業の期限に追われて内容を充分に詰められていなかったことが原因だったと思う。
改善策としては、同時並行して開発していける工程を見定めることが必要だった。特に開発初期はメカの仕事が多く、ソフトの仕事が少ない傾向にある。そのような場合に先を見据えて計画を立てられるかが、スケジュール管理の鍵になると思った。
さらに、役割の境界をつけすぎないことも必要だと思った。技術を熟知している人は限られているので、他の担当の仕事だからといって区切りをつけず、得意な人が開発に入って進めていったほうが良いと感じた。
PETBOTの開発の達成度に関しては、「ゴミの品質向上機能」「自動運搬機能」「状態通知機能」ともに、当初予定していた機能を発表会と社会実装までに実装できた。スケジュールには大きな遅れが出ていたが、当初の計画を達成できて良かった。
また、音声や外装を活用することで「リサイクルライフを快適に」というコンセプトを最後まで貫くことができ、「学校教育への応用」という将来性への繋がりも生まれたように感じる。
技術面では、分別判断の面で課題が残った。センサや構造に関しては、もう少し検討の余地があったかもしれない。一方で、自動運搬については予定以上の機能を実現でき、エレベーターの乗車まですることができた。
社会実装においては、授業中に音声が鳴るという実際の問題にも対応できた。コンセプトが受け入れられ、また分別の気を引く機能が必要であることも明確になった。
MIRS2304の班員の所感を以下に示す。
技術的には國嶋くんに聞くことが多く、ソフト担当としては中野くんに助けられました。エレベーターの使用がなんとか形になったのは中野くんのお陰でした。手が回っていないときにやることがないか聞いてくれるのが杉山さんと長岡さんで、とても助かりました。林くんの作ったPVがあったからこそ自動運搬が現実的になっていたように思います。メカの二人には設計をめちゃくちゃせかしてしまったので反省してます。
投入機能の担当でしたが、精度をあまり上げられなかったのが残念でした。センサーの選定や構造の設計にもっと時間を割けば良かったです。スケジュール管理と仕事の割り振りが一年を通しての反省点でした。ただ、スライド作成と発表、そしてマイコン周辺の知識はだいぶ増えたように思います。
チームリーダー、エレキを担当したが、自分で仕事をやってばかりであまり全体への指示ができなかった。
ロボットが動かないとき原因のほとんどはエレキにあり、実際にそういったことが何度もあり大変だった。しかし、一つ一つ何が悪いのか班員と協力して探っていく作業は楽しかった。
全体を通して反省点もあるが完成はし、実装実験を通じて様々な声を聴くことができてよかった。
MIRSのパーツの加工、PV作成を主に担当し、その他にも仕事を見つけサポート等を行った。
2年に行った機械実習の経験をもとに加工を実施し、加工が足りなかった際はラボにあるもので臨機応変に対応し、設計した通りのものを作成できたと思う。
PVの作成もMIRSがどのような機能を持っているか規定されている時間内に収めつつも伝えたいことやMIRSの機能説明を見ている人がわかりやすいよう作成できたと思う。
自分が担った役割を責任もって果たすという経験を学ぶ良い機会になったと思う。
実際にものを作るのが初めての経験で、設計・加工・製造などを通してたくさんのことが学べたと思う。
いろいろアクシデントや大変なことがあったけれど、なんとか完成できて結果も出たので良かった。
MIRSを通して、思ったより予定通りにいかないことが多かったので、そのたびに柔軟に対応して、新しいアイデアを考えることがとても大切だと感じた。
私は、専門的な技術がなく班員の足を引っ張ってしまうのではないかと不安だった。
それを言い訳にしないようにサポートや雑用等できることは進んで行った。しかし同時に、努力すればほかの班員の負担を減らしさらに良い開発ができたのではないかと感じることもあった。
開発において、班の一員として自分が持つべき責任や積極性をもって作業することの大切さを学ぶいい機会になった。
私はソフトを担当したが、あまりできることがなくほとんど資料や外装の作成を行っていた。そのため、外装や資料にこだわることはできたものの、プログラムに関しては他二人に任せきりになってしまっていた。
今年は初めて校内で実証実験を行い、例年に比べて機能の実現や継続的な運用など大変なところが多かったように思うが、実際に使っている様子を見たり、使った感想などを多く聞いたりすることができて面白かった。
ソフトを中心にハードの部分も触り、ロボット作成の難しさと奥深さを知ることができた。
思うように動かないときはソフトが悪いのか、ハードが悪いのか1つ1つ検証していることはとても苦労したが楽しかった。最後の方は班員との協力が少しできなかったと思うので、ここが反省点である。
実装自体は思った通りの動きができるように最低限の実装できたため良かった。
毎日楽しくMIRSができてよかった。
エレキ担当では、国嶋君から指示された作業をやった。
フォトリフレクタの基盤作りでは、3回ほど作り直した。フォトリフレクタを理解し、配線を事前に考えてからやることが大切だと思った。
PV作成のために3Dソフトを1から勉強し、ある程度触って物を作り、アニメーションで動かすことができるようになった。