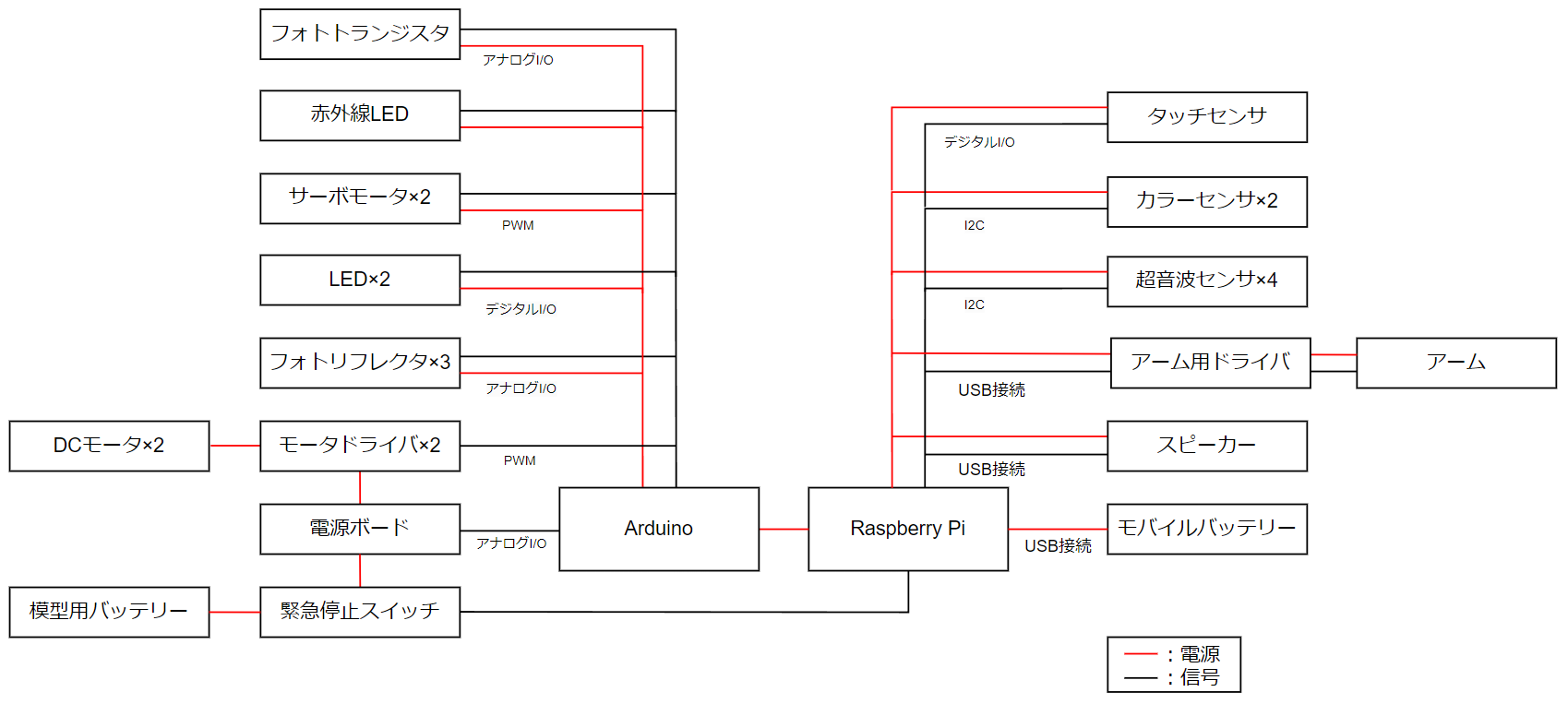
PETBOTの外観図を図1に示す。
外装は円形で、プラスチックダンボールを用いて作成する。
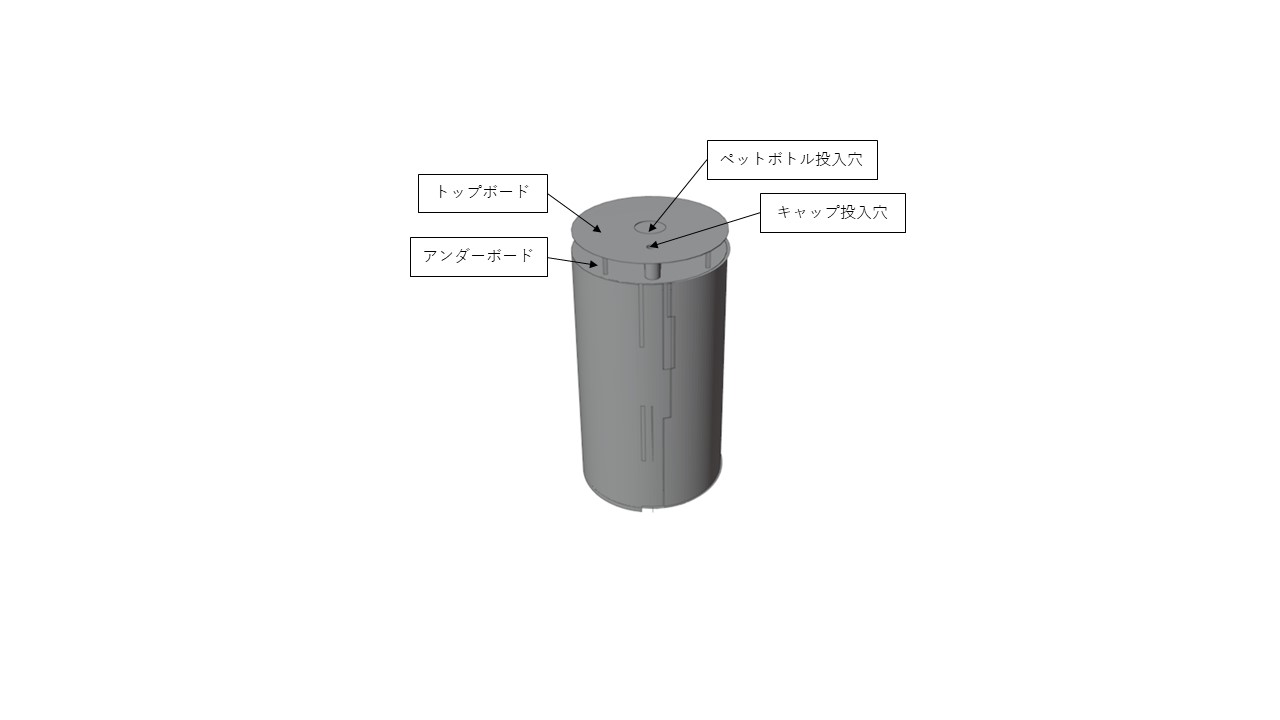
図1.PETBOTの外観図
内観図を図2に示す。
一番上のふたの下にもう一枚板があり、そこで水検知センサにより飲み残しを検知する。
その下に左右に動く板(モータで動作する)がある。この板は普段はペットボトルやキャップの真下にあり、
ゴミの通過をふさいでいるが、ペットボトルがセンサを通過すると左右にずれる。
これによってペットボトルは下のゴミ箱に落ちる。
キャップは外装とゴミ箱の隙間に落ちるようになっている。

図2.PETBOTの内観図
ゴミ投入機構のアップの図を図3に示す。
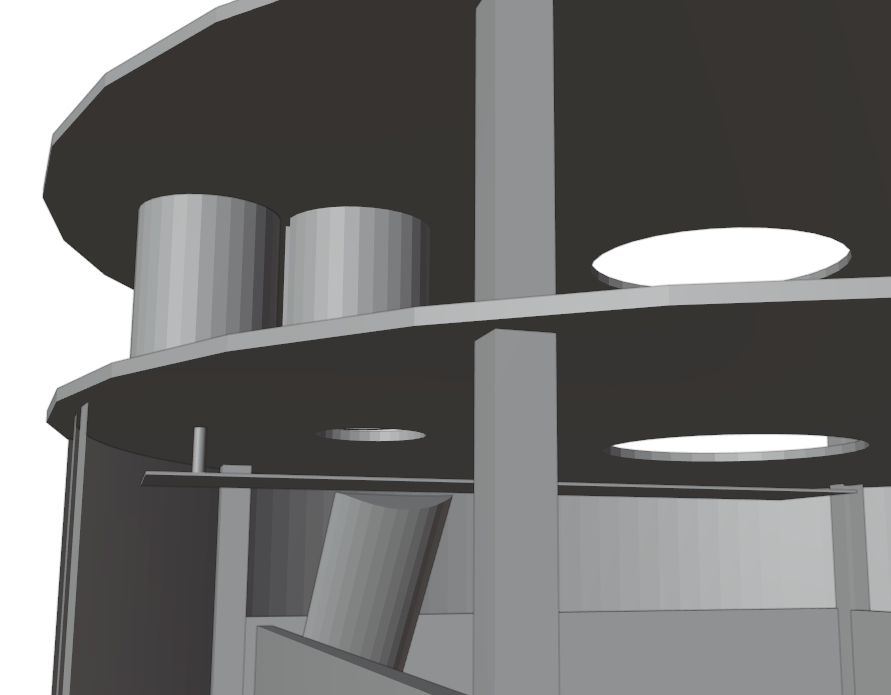
図3.ゴミ投入機構
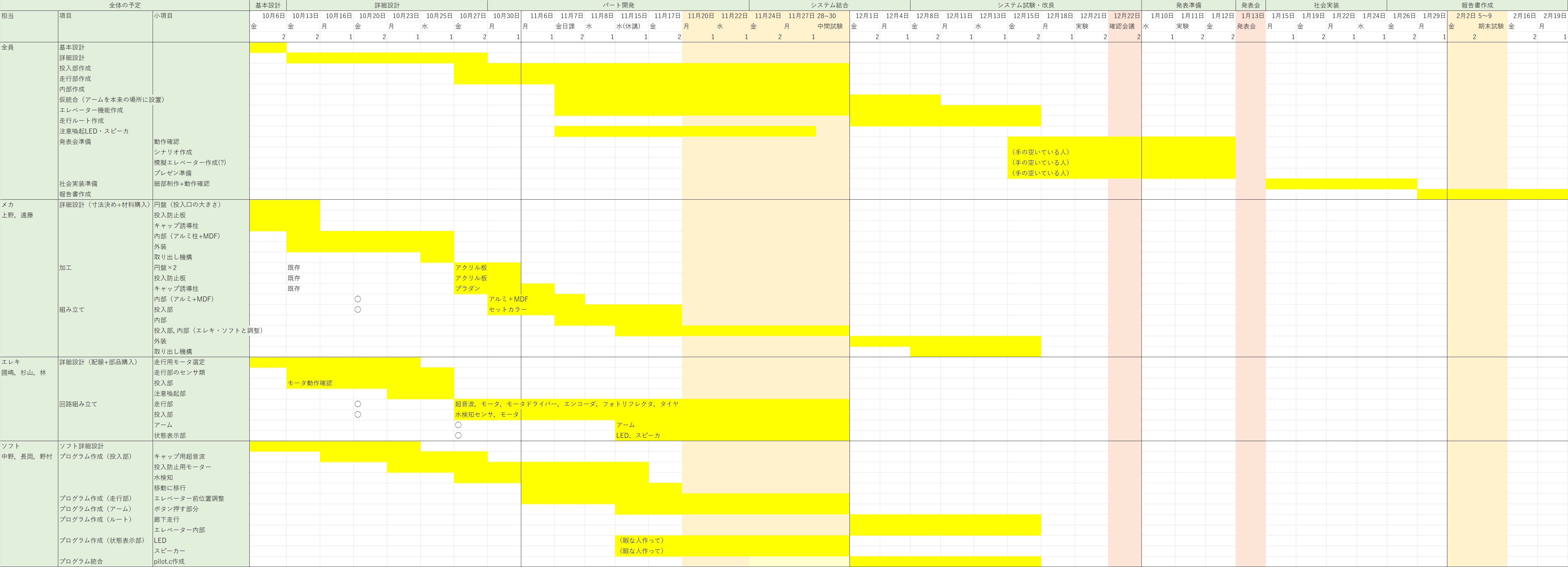
また、製作する部品を表1に示す。
表1.制作部品
| 部品名 | 材料 | 概要 |
|---|---|---|
| トップボード | アクリル板 |
アクリル板にペットボトルとキャップの穴を開ける ロボットアームを設置する機構を制作 |
| アンダーボード | アクリル板 | アクリル板にペットボトルとキャップの穴を開ける |
| キャップ誘導筒 | プラスチックダンボール | 筒状に制作 |
| ゴミ投入防止板 | アクリル板 | ペットボトルが落ちない幅に加工 |
| ゴミ箱 | MDF,アクリル板 |
板4枚を使って加工・制作 キャップ誘導筒の穴を開ける |
| 支柱 | アルミ柱 | ゴミ箱の高さに合わせて加工 |
| 上段シャーシ | アクリル板 | 支柱が立つように加工 |
| 外装 | プラスチックダンボール | 外装の形に合わせて制作 |