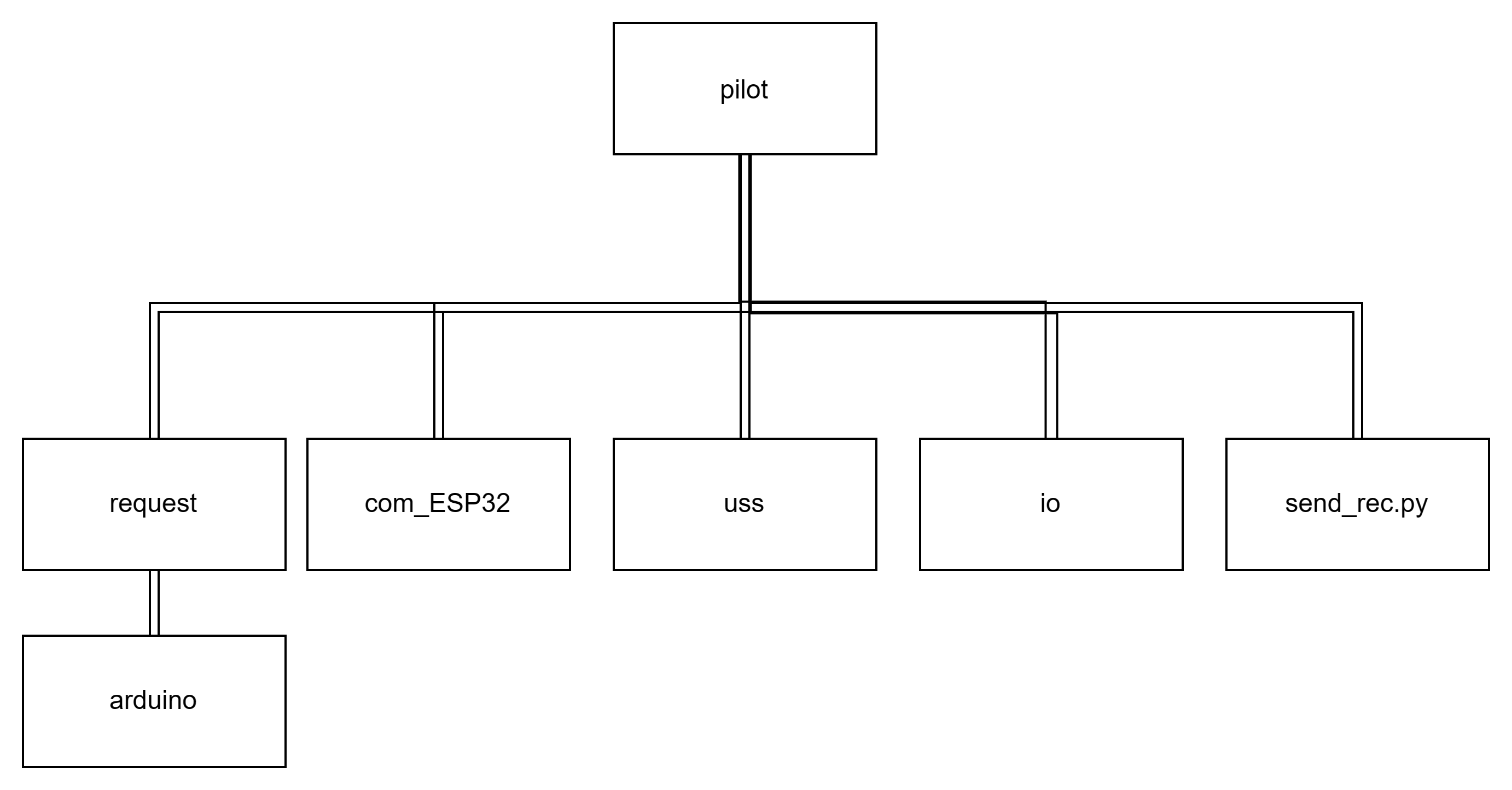
figure1. :親機・Raspberry Piのモジュール構成
| 名称 | MIRS2301 第1回ソフト詳細設計 |
|---|---|
| 番号 | MIRS2301-MEMO-0027 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2023.1.19 | 古賀 祐太, 田中 康太郎 | 香川 | 第2版 |
本ドキュメントはROCASLの親機のソフトウェア詳細設計書である。
機能概要をTable1に示す。
| 機能 | 概要 | 記述言語 |
|---|---|---|
| 壁との並行走行 | 黒板の下にある壁と20cmあけて走行する。 | C言語, Arduino |
| ワイヤー制御 | ワイヤーを巻いて吸引機の位置を調整する | C言語, ESP32 |
| 子機との通信 | 子機のESP32とBluetooth通信を行う | C言語, ESP32 |
| 黒板レーンの吸引清掃 | 黒板のレーンのチョークの粉を吸引機構で清掃する | C言語, Arduino |
| 空気清浄 | 空気を吸引し、フィルターを通して空気清浄を行う。 | C言語, Arduino |
親機のRaspberry Piのモジュール構成をfigure1, Table2に示す。
| モジュール名 | 概要 |
|---|---|
| pilot.c | 親機の動作の制御をする |
| request.c | すべてのモータを制御する |
| com_ESP32.c | ESP32とI2C通信する |
| base_ext.c | 子機とbluetooth通信する |
| uss.c | 超音波センサの値を読み取る |
| io.c | タッチセンサを読み取る |
親機のArduinoのモジュール構成をfigure2, Table3に示す。
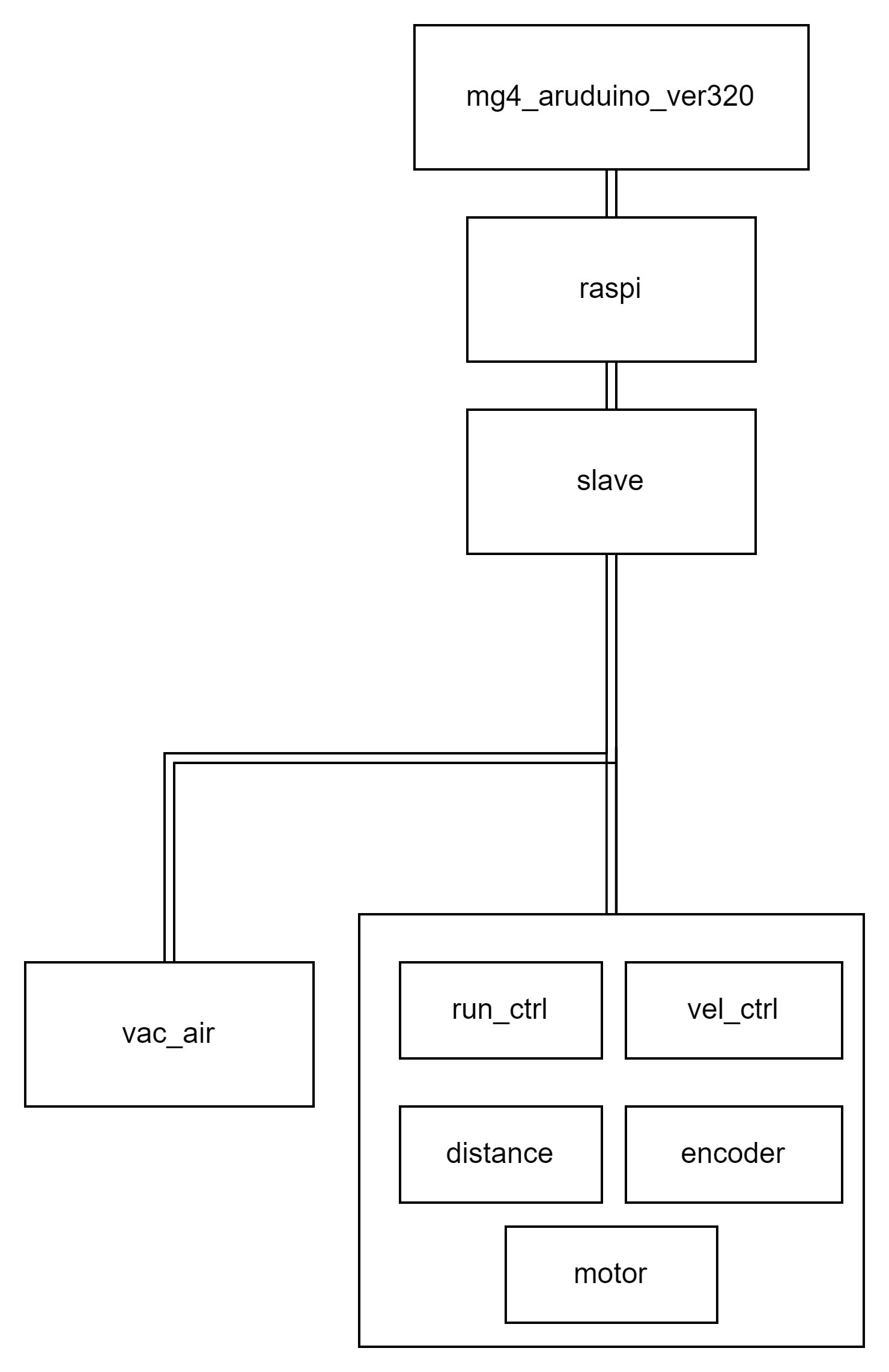
| モジュール名 | 概要 |
|---|---|
| raspi.ino | Raspberry Piと通信する |
| slave.ino | Raspberry Piから受け取ったデータをもとに実行する動作を振り分ける |
| vac_air | 吸引機能と空気清浄機能の操作を行う |
親機のESP32のモジュール構成をfigure3, Table4に示す。
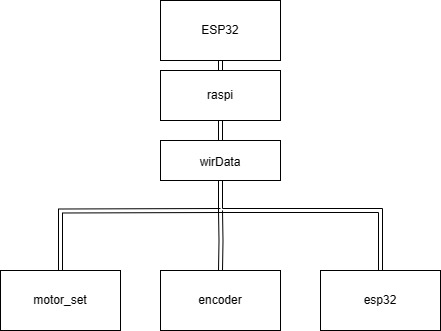
| モジュール名 | 概要 |
|---|---|
| raspi | Raspberry PiとI2C通信をする |
| motor_set | ワイヤー制御を行う |
| encoder | モータの回転数をカウントする |
| wirData | データを受け取る |
| esp32 | 子機のESP32とBluetooth通信を行う |
親機のフローチャートをfigure3に示す。

| 物品 | 販売ページ | 使用用途 | 単価 | 個数 | 小計 |
|---|---|---|---|---|---|
| 4速クランクギアボックス | 4速クランクギアボックス | モータ制御の単体試験のため | 725円 | 1個 | 725円 |