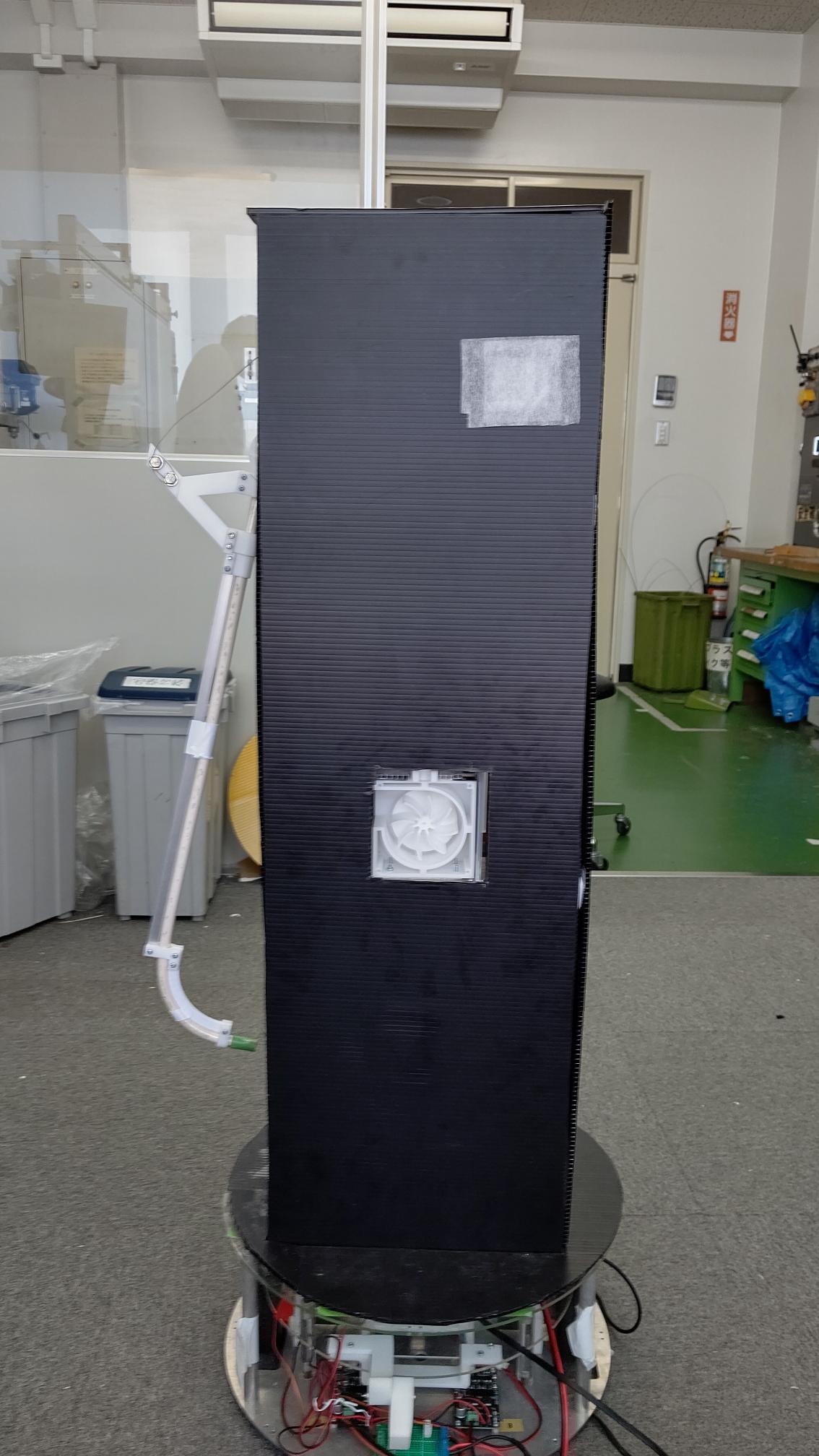
figure1. :親機
| 名称 | MIRS2301 第1回開発完了報告書 |
|---|---|
| 番号 | MIRS2301-MEMO-0027 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2024.2.16 | 古賀 祐太 | 初版 |
本ドキュメントはROCASLの開発完了報告書である。
まず、制作した機体をfigure1, figure2に示す。

次に、制作した機体の評価をTable1, Table2に示す。
| 機能 | 概要 | 評価 |
|---|---|---|
| 壁との並行走行 | 黒板の下にある壁と60~68cmあけて走行する。 | 正対補正は角度に2~3℃のずれが見られたため、 壁との並行走行はあまり並行ではなかった。 |
| 黒板レーンの吸引清掃 | 黒板のレーンのチョークの粉を吸引機構で清掃する | 高さが合えば吸引は可能であった。 少しでも高いと吸引せず、 低いとレーンとホースが接触し走行がずれてしまった。 |
| 空気清浄 | 空気を吸引し、フィルターを通して空気清浄を行う。 | 動作はしたものの、効果は見られなかった。 |
| 機能 | 概要 | 評価 |
|---|---|---|
| 自律走行 | 教室内をliderを用いて自律走行を行う | 机の認識ができなかった。壁やロッカーなどはできた。 |
| 床清掃 | 教室内を水ぶきシートを用いて清掃する | 目に見えてわかるくらいきれいになった。 |
発表会における結果は以下のとおりである。
発表会(得票) 第4位
他班との比較をTable3、技術評価をfigure3に示す。
| 班名 | プロジェクト名 | 得票数 | 得票率 | 順位 |
|---|---|---|---|---|
| MIRS2301 | ROCASL | 31 | 15.4% | 4 |
| MIRS2302 | TENQ | 55 | 27.4% | 2 |
| MIRS2303 | PUNIT | 48 | 23.9% | 3 |
| MIRS2304 | PET BOT | 67 | 33.3% | 1 |

社会実装報告書を以下のURLに示す
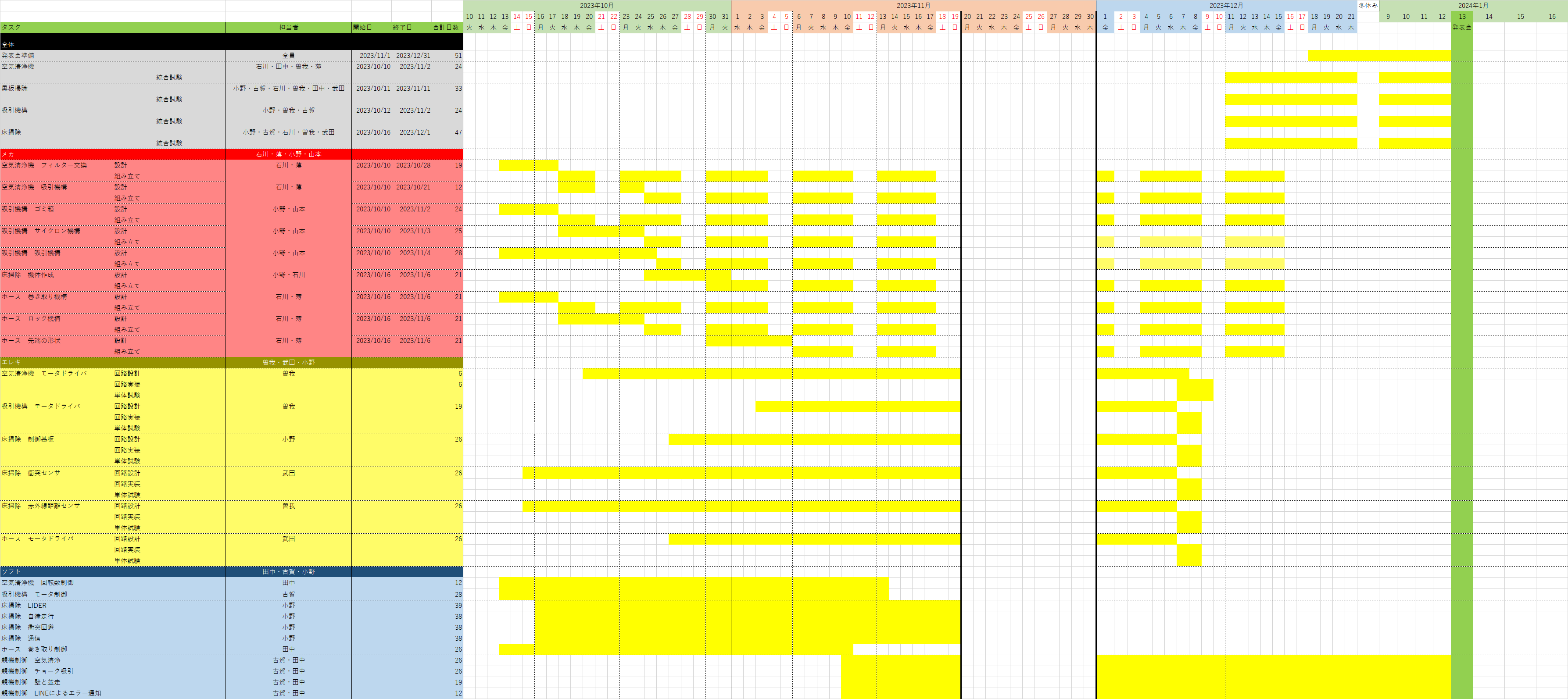
予定だった開発日程表と実際の作業日程表を示す。

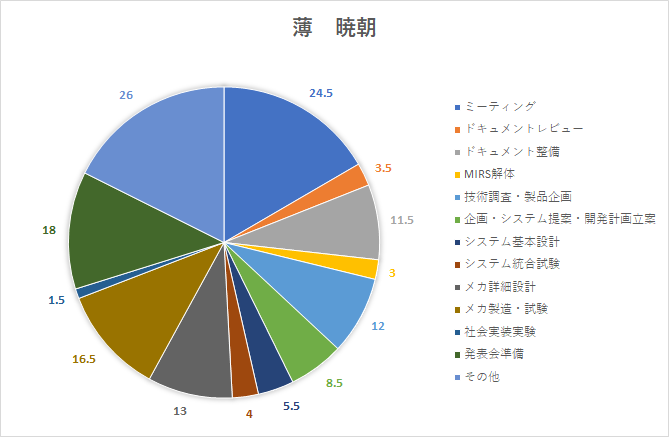
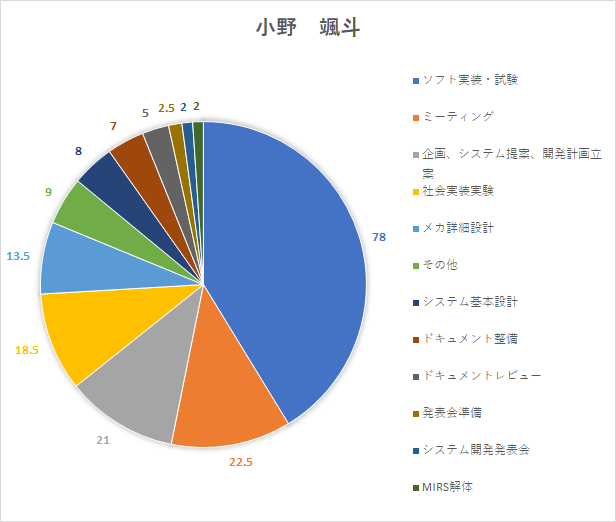
各班員ごとの作業時間を以下に示す。




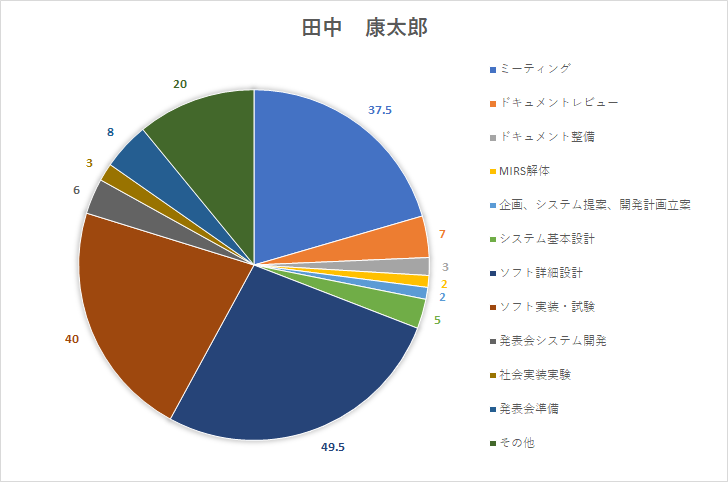
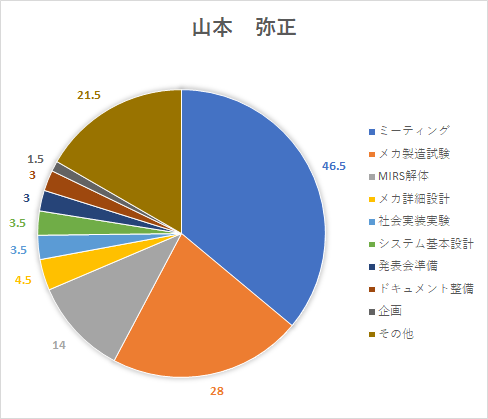
分析
個人の作業時間について役割によっても人によってかなり差があることが読み取れる。これは報・連・相が足りておらず、結果として進捗と次に何をすればよいのかを把握している人が作業し、偏りが出てしまったのではないかと考えられる。その影響がガントチャートにも出ており、予定とは違う形となってしまった。 またそれ以外でも問題はあり、開発初期での進捗が遅れており、ソフトや外装といった完成してからでないと取り組めない作業が後半で多く残ってしまった。 改善案として、班員はPM・TLに作業内容の報告を班員はして、PM・TLはそれをまとめて管理し、次のタスクを共有することで人員を余すことなく、効率的に活用できると考えた。メカ
メカ全体の役割分担として、親機を石川・薄・山本、子機を小野が担当した。レビュー資料作成やCADによる部品設計・印刷を石川が担当し、ベース構造の設計やCADによる部品設計・組み立て、外装制作を薄・山本が担当した。また、レーザーによる木材やアクリルの加工を全員で行った。 メカとしての進み具合は、主に親機に遅れが生じていた。その原因として、3Dプリンタによる印刷に大きく時間がとられてしまったこと、設計と製作を分けてしまったことで、双方の考え方にズレが生じた時にすぐに再設計ができなかったことが挙げられる。しかし、設計自体や組み立てはスムーズに行うことができたため、結果的にそれほど遅れることはなかったと言える。 次に実装実験を通してのメカ改善点について考える。一番の問題点は、ホースによる吸引がうまくできなかった点である。これは設計したファンが小さかったこともあるが、ホースの長さ・吸引機構の材質や形にも問題があったと考える。チョークの粉がダストボックスではなく吸引機構の面に付着していることや、ホース先の機構を往復することを考慮した形にするなど、メカにおける改善点は多々あった。外装に関しても、初期に購入した外装は思っていた以上に材質が薄く、使用には至らなかったことは反省すべき点であると思う。また、子機においては小型化することによって、整備性が悪くなってしまった点が挙げられる。 進捗状況の遅れや改善点等も多くあったが、親機・子機ともに機能面についてはほとんど妥協することなく製作できたのではないかと考える。エレキ
エレキはKicadを用いた電子回路の設計や電子部品をユニバーサル基板のどこに配置するかという製作までの過程を洗い出すことで実物の完成は素早くできたのではないかと自負している。 しかし、子機などを用いた統合試験においてはうまくいかない動作に直面した時、例えば一定の速度で走らない。速度にむらがある。そういった動作の原因を追究することが出来ずとりあえずコンデンサを追加するというその場しのぎでごまかした点があった。 まとめると設計から製作までの手順は効率が良かった。だが、自分たちが作る機体に対しての整合性とその見積もりが足らなかったというのがエレキ全体としての総括である。ソフト
ソフトとしてはメカやソフトが終わるまでに、プログラムを完成させていたが実際に動かすことによる不具合があり、その調整が大変であった。 社会実装に伴い、ソフトだけでは解決できない問題がありそれについても都度話し合いを行うべきであったが少ししか改善できなかった。購入物品のタイミングもあり、もっと早く社会実装について考えられていれば解決できた点もあった。全体
ROCASLの開発において「床のふき掃除」「空気清浄」「黒板レーンの吸引による清掃」の3つの機能の実現に向けて進めたが、空気清浄は特に劣って見えた。少ない予算で多くの機能を実装しようとして、その結果パワーが足りず回るだけの飾りとなってしまった。これに限らず、吸引器のパワーが足りていなかったり、ホースの内側にチョークの粉がくっついてしまうなどに関しても、全体的に検証が足りていなかったことが要因であると考えられる。 また、進捗とタスクの共有が行えていなかったことが問題として挙げられる。ある人は終わっていると思っていても実は終わっておらず、把握している人だけがその作業を行うといったことがあった。チーム開発ではコミュニケーションが重要であるため、そこが足りていなかったと感じた。
各班員の所感を以下に示す。
<曽我 翔平> エレキ・PM
自分はこのMIRSを通して、資料作成の技術や発表能力などのアウトプットに関する力が身についたと思います。資料作成に当たってはパワーポイントのレイアウトを工夫して聞き手の全員に伝わりやすい、見やすい資料を作るように努力しました。発表に関しては相手に興味を持ってもらえるように意識しました。 一方、進捗を把握する能力やリスクマネジメントなどのリーダーシップに関するものとしてはまだまだ足りないものがあると思いました。<小野 颯斗> メカ・TL
メカの開発においてはほかのチームよりは比較的早く進んでいたがソフトの開発が遅れていたり作成後の機能試験などに十分な時間を釣ることができなかった。また、チーム内での連携もうまく取れていない部分があり発表会当日でも準備不足が露呈してしまう部分があった。親機と子機という二つのロボットを作成することにしたが最終的には中途半端な感じになってしまった。スケジュール管理やタスク割り振りなど、より明確な計画を立て計画通りに実行することが重要だと感じた。結果としては不十分であったがコンセプトに沿ったロボットが作れてよかったと思う。<石川 涼之佑> メカ
mirsの機体の作成・設計を担当し無事に機体が出来上がったものの、統合試験の際に問題が発生し、その問題には対処しきれなかった。 また体調管理が甘く、開発や報告書作成に遅れをきたしてしまった。 また全体を通して、他人とのコミュニケーション不足による開発の遅れが目立っていたことから、今後グループでロボットを作るときは積極的に開発状況の話合いを行っていきたい。<薄 暁朝> メカ
私は今回のMIRS授業を通して、主に三つの力が身についたと思う。一つ目は、課題解決能力である。PBL型の授業であるため当たり前ではあるが、「様々な調査を行って問題を発見し、それを解決する方法を考えて実際に実装する」という一連のプロセスは、これから社会に出ていくにあたってとても重要なことであると実感できた。二つ目は、各種ソフトの応用方法や発表資料の作成能力である。今までは授業として勉強してきたものであり、実際に活用するという場面はなかったと思う。しかし、自分達で考えたロボットに学んできた内容を活用して作っていく、というのは強く印象に残る経験となった。<山本 弥正> メカ
ROCASLを作る1年間は挑戦と学びの連続で、計画から実装までの工程で様々な問題に直面・解決していく過程でロボットを作る上での考え方やノウハウ、技術力が向上しました。MIRSを完成させるにはチームの協力が必要不可欠で、最終的にはなんとか形になり満足感を得ることが出来ました。<武田 巧達> エレキ
今回のMIRSを通じて、作業計画の重要性がよく分かった。グループワークにおいて立てた計画通りに作業が進みづらいことを再確認し、用意した計画との差がどれだけ結果に影響することも身をもって感じることができた。自身の立てた計画だけでなく班全体が計画通りに進むためもっと積極的に行動すべきだったと思う。一方で、電気的な部品の作成やドキュメントの整備など割り当てられた役割を全うするという点では十分に積極的な作業が行えたと思う。ドキュメントマネージャとしての仕事はこれまで触れることの無かったのに触れることができたため、良い経験となった。反省点を踏まえつつ、MIRSと通してできたことは今後も続けるようにしていきたい。<田中 康太郎> ソフト
自分はソフトを担当したが、今回子機と親機の二つのプログラムをソフトで分担したが、改善できる点はいくらでもあるがシステムをしっかり完成させることができたので良かった。実際に大変だったのはメカ、エレキ、ソフトそれぞれの進捗を合わせて機能の見直しを行うことができないこともあった。制作作業に入った後ももっと班内での話し合いをすべきであると考える。チームでの製作作業には話し合いで情報共有することが大切ということを学べた。<古賀 祐太> ソフト
僕はLINEの予約システムに一番力を入れた。それが、発表会と社会実装では回線が安定しないなどの理由からみせることができなかったのが悔しかった。しかし、アンケートではラインの予約システムを見てくれたD4の学生からはすごい等のコメントがあってとてもうれしくなった。