| 名称 | MIRS2205基本設計書 |
|---|---|
| 番号 | MIRS2205-DSGN-0002 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2022.10.17 | 飯塚蘭斗 | 牛丸先生 | 第1版 |
| A02 | 2022.11.08 | 飯塚蘭斗 | 牛丸先生 | 第2版 | A03 | 2022.11.11 | 飯塚蘭斗 | 牛丸先生 | 第3版 |
目次
1.システム概要
MIRS2205は「寮における点呼システムを統一・簡略化し安全・正確に実施するロボット」である。
寮生を対象として、寮の点呼をロボット点呼にする。あらかじめ寮の廊下にラインを引いておき、ライントレース走行でスライド移動し各部屋の前で点呼を行う。部屋の前に出ている寮生をカメラユニットを用いた画像認識と、学生証IDの読み取りで個人の確認を行う。そして、確認時に体温を測定する。点呼記録データを棟長・階長・寮監に共有し確認できるようにする。
2.機能・性能
- 人の判別機能 カメラユニットを用い、寮生の画像を取得。そこからOpenCVを使用した画像認識で個人を判断する。
- ID認識機能 ICカードリーダを用いて学生証をかざすことでIDを取得する。
- 表示機能 ディスプレイにカメラユニットから取得した画像と点呼結果、体温を表示し、寮生の顔が正常に写っているか・点呼結果・検温結果を寮生が把握できるようにする。
- 点呼結果書き込み・送信機能 点呼結果を専用のテキストファイルに書きこむ。 寮の管理者が点呼結果を把握できるようにテキストファイルを関係者に送信する。
- 体温計測機能 赤外線センサを用いて画像認識とともに寮生の体温を0.1度単位で計測する。
- 通信機能 寮にあるWi-Fiを使い通信を行う。
- ライントレース走行 寮の廊下に黒い線を引き、フォトリフレクタを用いてライントレースを行う。
- 緊急停止 物理スイッチを押下することで、強制的に動作を停止させる。
走行用のラインとは別に扉の前の廊下に目印をいれ、フォトリフレクタを用いて寮生の扉の前で一時停止する。

Fig.1ライントレース説明
3.システム構成
3.1メカニクス
- 担当者 MIRS2205のメカニクス担当メンバーを以下に示す。
- 外観図 外観図をFig.2に示す。
- 制作部品の概要 制作する部品をTab.1に示す。
・村岡真聡
・岡村翔
・小谷耀
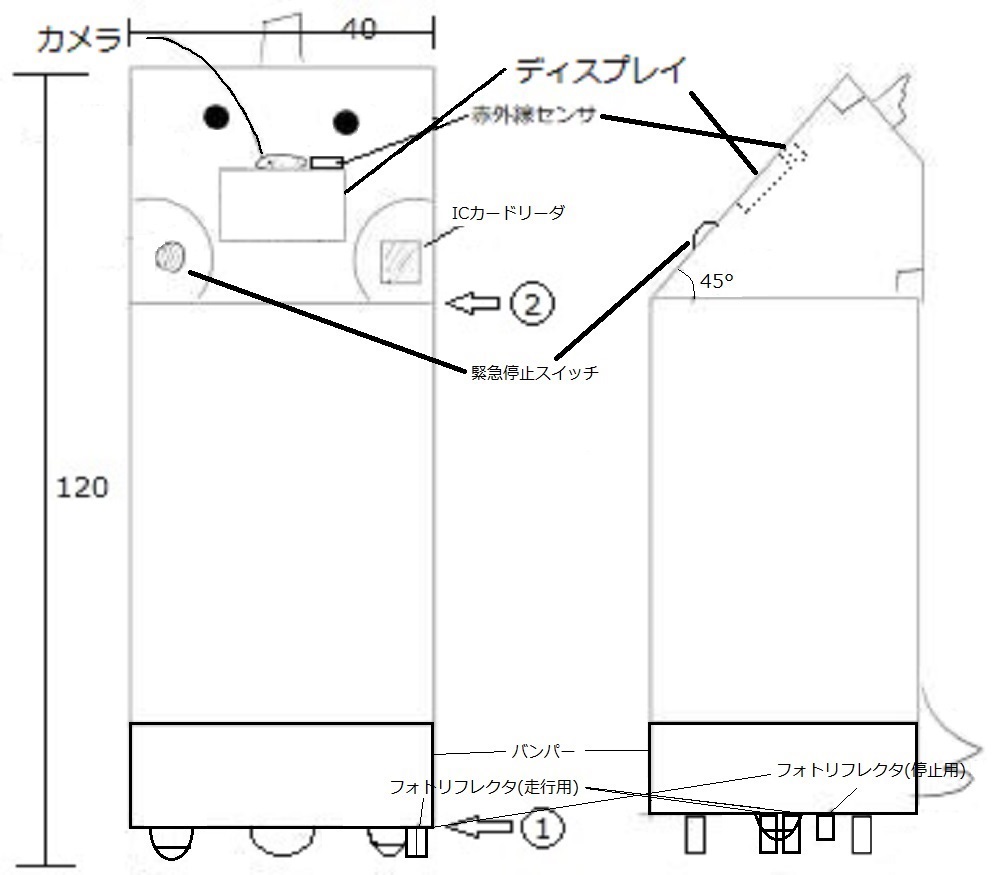
Fig.2外観図
標準機から角柱状に伸ばし、カメラ、赤外線センサ、ディスプレイ、ICカードリーダー、緊急停止ボタン、フォトリフレクタをFig.1のように配置する。
バンパー・タッチセンサーは機体の下部(最下部土台付近)で、四方を囲むように設置する。
| 制作部品名 | 内容 | 担当 |
|---|---|---|
| 土台(最下部)① | フォトリフレクタを追加するためにアルミ板を加工する | 岡村、小谷、村岡 |
| 土台(上部)② | 樹脂板を加工する | 岡村、小谷、村岡 |
| 支柱 | アルミフレームを加工する | 岡村、小谷、村岡 |
| ディスプレイ枠 | 3Dプリンターを用いて作成する | 岡村、小谷、村岡 |
| ICカードリーダー枠 | 3Dプリンターを用いて作成する | 岡村、小谷、村岡 |
| 外装、バンパー | アクリル板を加工する | 岡村、小谷、村岡 |
3.2エレクトロニクス
- 担当者 MIRS2205のエレクトロニクス担当メンバーを以下に示す。
- システム構成図 システム構成図をFig.3に示す。
- 電源 電源をTab.2に示す。
- 駆動部・操作部 駆動部・操作部をTab.3に示す。
- センサ・I/F センサ・I/FをTab.4に示す。
・安間丈紘
・眞野未央
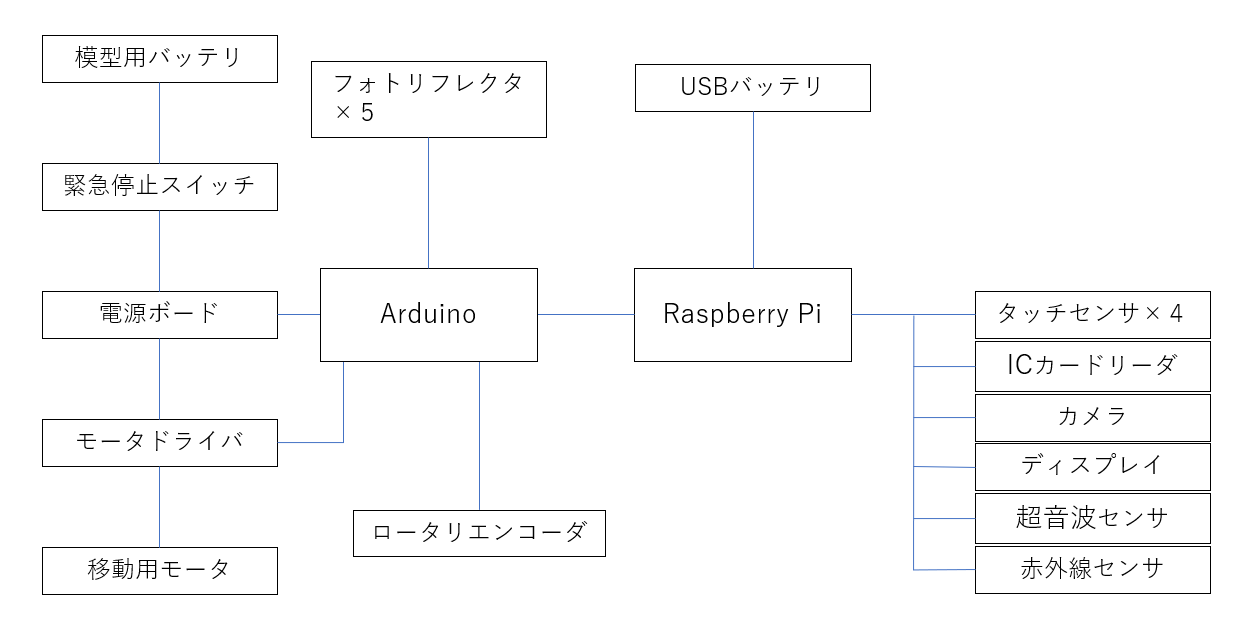
Fig.3 システム構成図
標準機からの変更点
・フォトリフレクタの追加(走行用フォトリフレクタの予備を含め5つ取り付けるが、バックアップ機能は持たない。システム開発の段階でフォトリフレクタの反応が異常になった場合、開発者が素子を変えることを円滑に行うための予備として取り付ける。)
・タッチセンサ、ICカードリーダ、ディスプレイ、赤外線センサの追加
・緊急停止スイッチの追加
標準機から変更しない点
・タッチセンサ、カメラ、超音波センサの使用
・USBバッテリの使用
・ロータリエンコーダの使用
・モータドライバ、移動用モータの使用
・電源ボード、模型用バッテリの使用
| 部品名称 | 目的 | 備考 |
|---|---|---|
| 模型用バッテリ | 電源ボードを介して移動用モータに供給する | 標準機と同じ |
| USBバッテリ | RaspberryPiにUSBで供給する | 標準機と同じ |
| 部品名称 | 目的 | 備考 |
|---|---|---|
| 非常停止スイッチ | 緊急時に模型用バッテリからの出力を断ち、モータの動作を停止させる | 開発必須 |
| 部品名称 | 目的 | 通信方式 | 備考 |
|---|---|---|---|
| 赤外線センサ | 体温を計測する | I2C通信 | 部品追加 |
| 超音波センサ | 距離を計測する | I2C通信 | 標準機と同じ |
| タッチセンサ | 触れた物体を検知する | デジタルI/O | 標準機と同じ |
| カメラ | 寮生の顔を認識し、特定する | USB | 標準機と同じ |
| ICカードリーダ | 学生証を検知する | USB | 部品追加 |
| フォトリフレクタ(走行用) | ライントレース走行のために黒線を検知する | アナログI/O | 部品追加 |
| フォトリフレクタ(停止用) | 部屋の前で停止するために黒いマークを検知する | アナログI/O | 部品追加 |
3.3ソフトウェア
- 担当者 MIRS2205のソフトウェア担当メンバーを以下に示す。
- 必要となる機能 Raspberry Piに必要な機能
- 開発する機能要素 開発する機能要素をtab.5に示す。
・相川将斗
・飯塚蘭斗
・長澤稔幸
・顔認証機能
・ディスプレイ表示機能
・超音波による測定機能
・フォトリフレクタによる走行制御機能
・赤外線センサによる検温機能
・在室の有無と体温の保存機能
・Arduinoとの通信機能
・記録の送信機能
・Wi-Fiを通した通信機能
Arduinoに必要な機能
・モータの制御機能
・ロータリエンコーダの値の取得
・Raspberry Piとの通信機能
| 機能 | 目的 | 方法 |
|---|---|---|
| 顔認証 | 在室確認と本人確認のため | OpenCVを利用し、RaspberryPi内で学習したデータと映った人を照らし合わせ本人確認を行う。 |
| 走行 | ロボットの移動のため | PID制御を用いて、ライントレースを行う。 |
| 体温測定 | 健康確認のため | 赤外線センサで得た値を0.1度単位で体温に変換する。 |
| 衝突回避 | 障害物や人に当たらないようにするため | 超音波センサで前方にモノがあるか確認し、近づいたら停止又は減速を行う。 |
| 記録 | データを残すため | CSVファイルに点呼結果・体温結果を書き込む。 |
| 通信 | 寮の関係者が確認できるようにするため | Wi-Fiを用いてMicrosoft Outlookを通し、関係者のアカウントに記録データを送信する。 |
| ディスプレイ表示 | 寮生の顔がカメラで捉えられているかの確認・点呼結果確認・体温確認のため | カメラに写っているもの・点呼した人の名前・検温結果をディスプレイに表示する。 |
| ID標識 | 学生証を読み取るため | ICカードリーダを用いて読み取る。 |
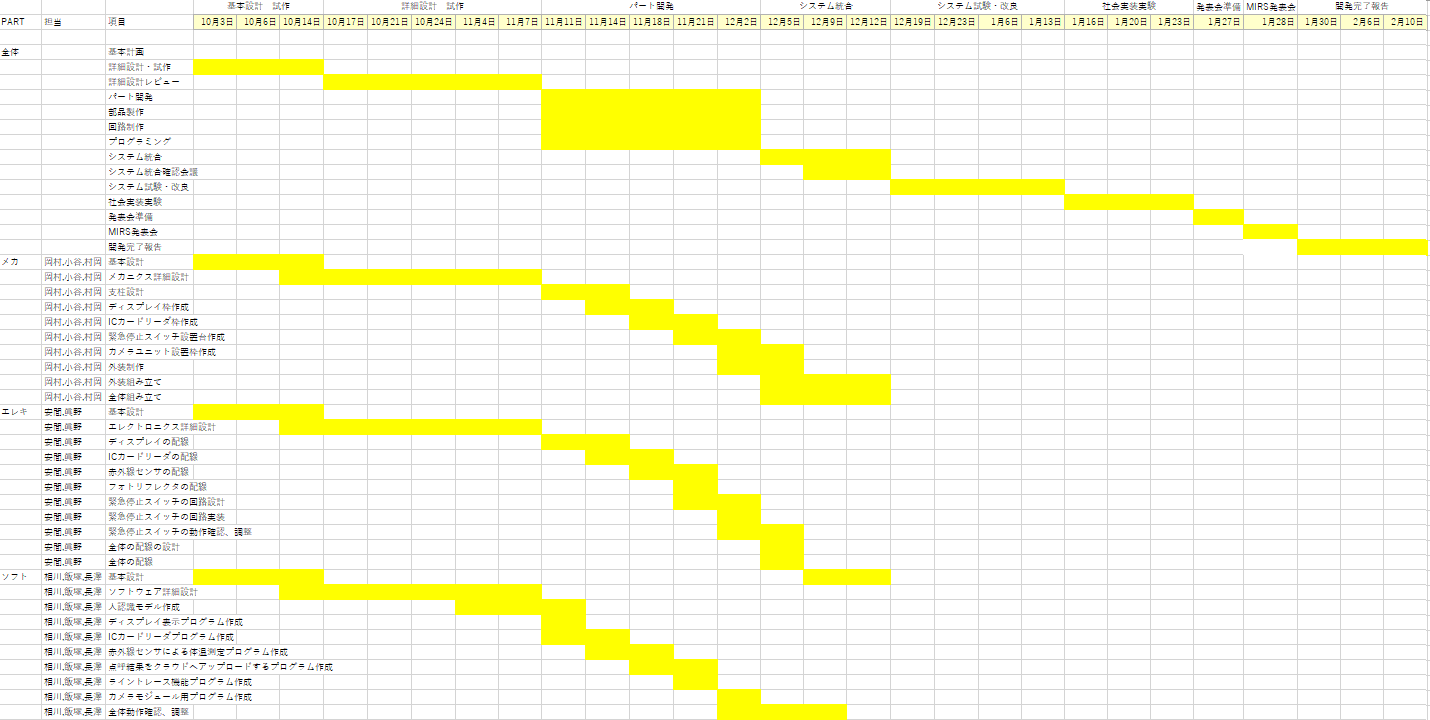
4.開発工程表
tab.6 ガントチャート
5.購入部品一覧
| 物品名 | 1個当たり(税込) | 個数 | サイトURL | 総計 |
|---|---|---|---|---|
| 赤外線センサモジュール | 4950 | 1 | 販売ページ | 4950 |
| ICカードリーダ |
4308 | 1 | 販売ページ | 4308 |
| ディスプレイ |
6999 | 1 | 販売ページ | 6999 |
| SF-20・20アルミ角材 | 販売ページ | フォトリフレクタ |
50 | 5 | 販売ページ | 250 |
| 合計金額 | 16,257円 | |||
MIRS2105ドキュメント管理台帳へ