table.2 モジュールの詳細
| モジュール名 |
概要 |
関数名 |
引数 |
戻り値 |
備考 |
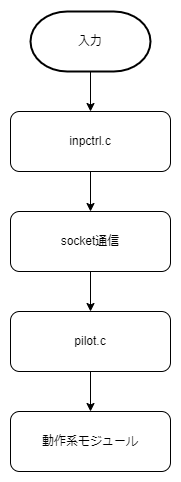
| pilot.c |
MIRS全体の制御を状態遷移図に沿って行う |
なし |
なし |
0 |
キーボード入力受付はソケット通信のrecv()を用いたポーリングを行う |
| inpctrl.c |
ユーザーPC(OSはLinuxを想定)からのキーボード入力をリアルタイムでsocket_user.cに数字に変換して受け渡す |
int inpctrl() |
なし |
0~17の整数 |
0:エラーのときに用いる
17:接続を切断のときに用いる |
| socket_user.c |
ユーザーPC(OSはLinuxを想定)とRaspberry Pi間でソケット通信を行う |
int socket_user() |
int KEY |
0 |
別々のプロセスでデータの通信ができるため採用した.またLinuxOSを採用した理由はプロセス間通信がLinux同士だと容易であるからである. |
| socket_mirs.c |
pilot.cを簡単にするためソケット通信のaccept()までを実行する |
int socket_mirs() |
なし |
0 |
なし |
| distr.c |
pilot.cでポーリングしたキー入力を文字データで必要な関数に振り分ける |
int distr() |
なし |
0 |
なし |
| home.c |
HOMEを実行する |
int on_line()
int linetrace() |
なし |
0,1 |
int on_line():MIRSをラインに乗せるための関数
int linetrace():MIRSをラントレースさせる関数
|