2. メカ
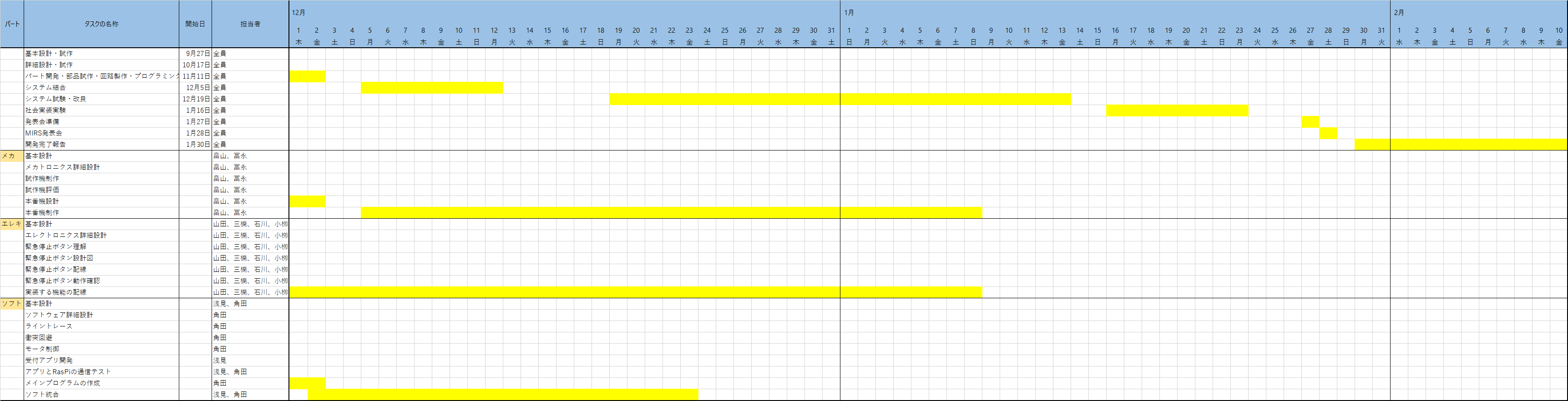
ロボットフレーム全体イメージ図を以下にfig.1及びfig.2として示す。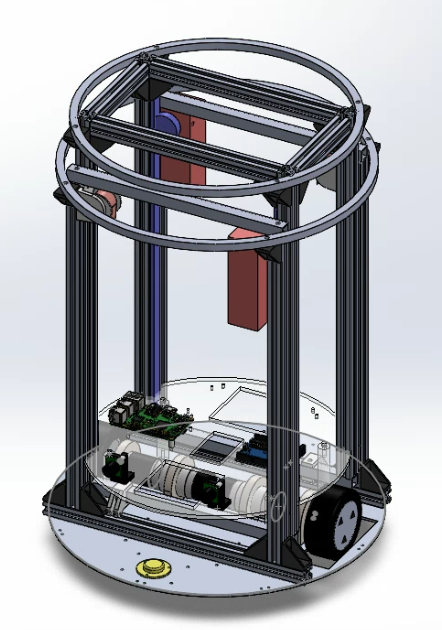 |
 |
||||||||
| fig.1 全体図(格納時) | fig.2 全体図(展開時) |
上部フレームと下部フレームに分かれており、下記スライダパーツによって接合されている。
フレームはMISUMIアルミフレームを軸にアルミ製のものを採用する。
上部フレームは下部フレームに沿って上方向に展開する。
格納時高さは約600mm、展開時高さは約1000mm程度を予定している。
動力はモータ(図中赤い直方体)を用いたラックアンドピニオン方式を採用する。
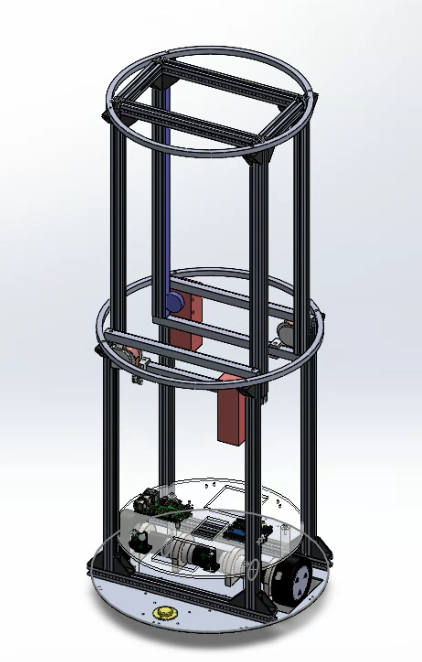
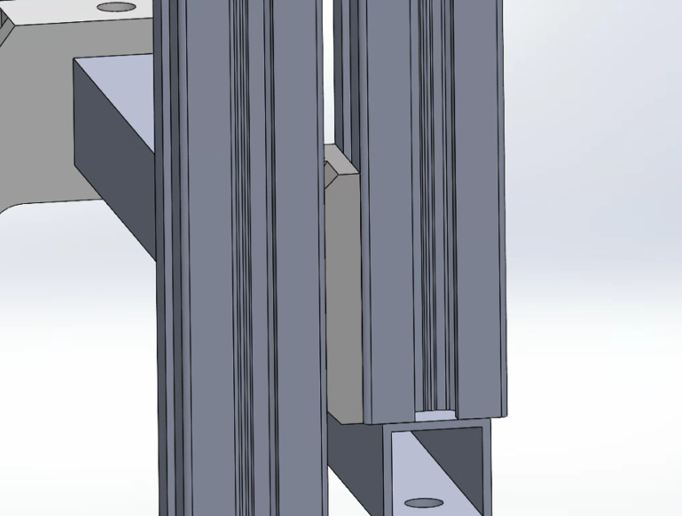
昇降機構のスライド部イメージを以下にfig.3及びfig.4として示す。
 |
 |
||||||||
| fig.3 スライダ | fig.4 スライダ組み立て |
fig3パーツの右面を上部フレームに締結する。左面の突起部分を下部フレームの溝にはめ込む。これにより上下方向以外の自由度をなくし、上下方向にのみ可動する。
昇降機構のカウンターウェイト部を以下にfig.5として示す。
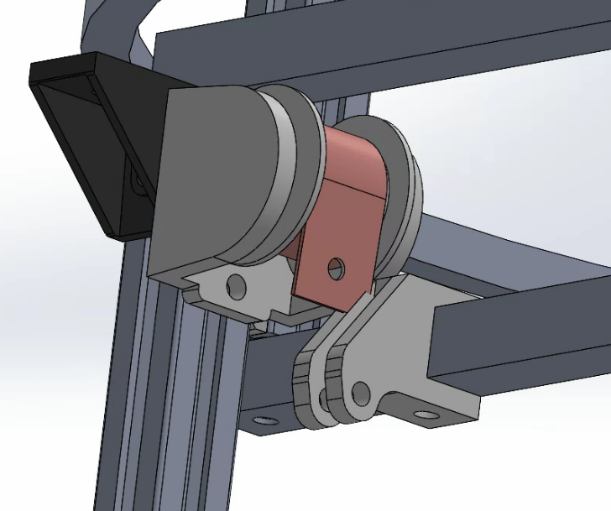
fig.5 カウンターウェイト
上部フレームとそこにつくパーツの重さに対してカウンターウェイトをかける。これは駆動用のモータやギアにかかる負荷を大幅に減らすと同時に、イナーシャ比を制御のしやすい値にする狙いがある。
カウンターウェイトは、定荷重ばねを用いたものを採用する。本体固定パーツを下部フレームの最上部に固定し、先端固定パーツを上部フレーム最下部に固定する。これにより、上部フレームに対し常に重力とは反対方向の力が働くことになる。