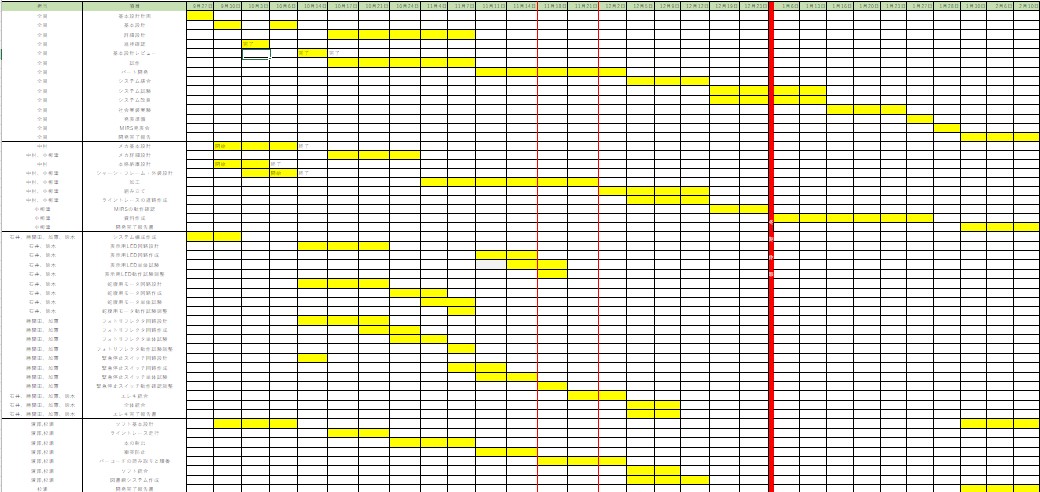
3.1. メカニクス
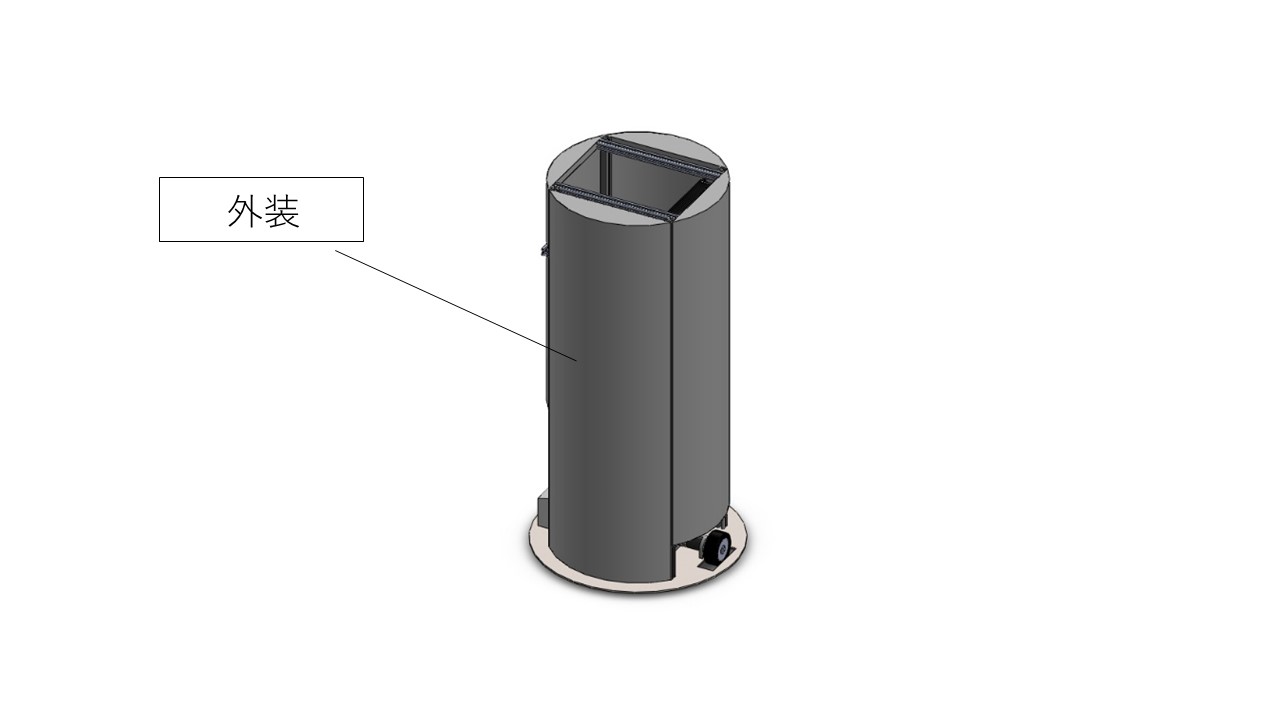
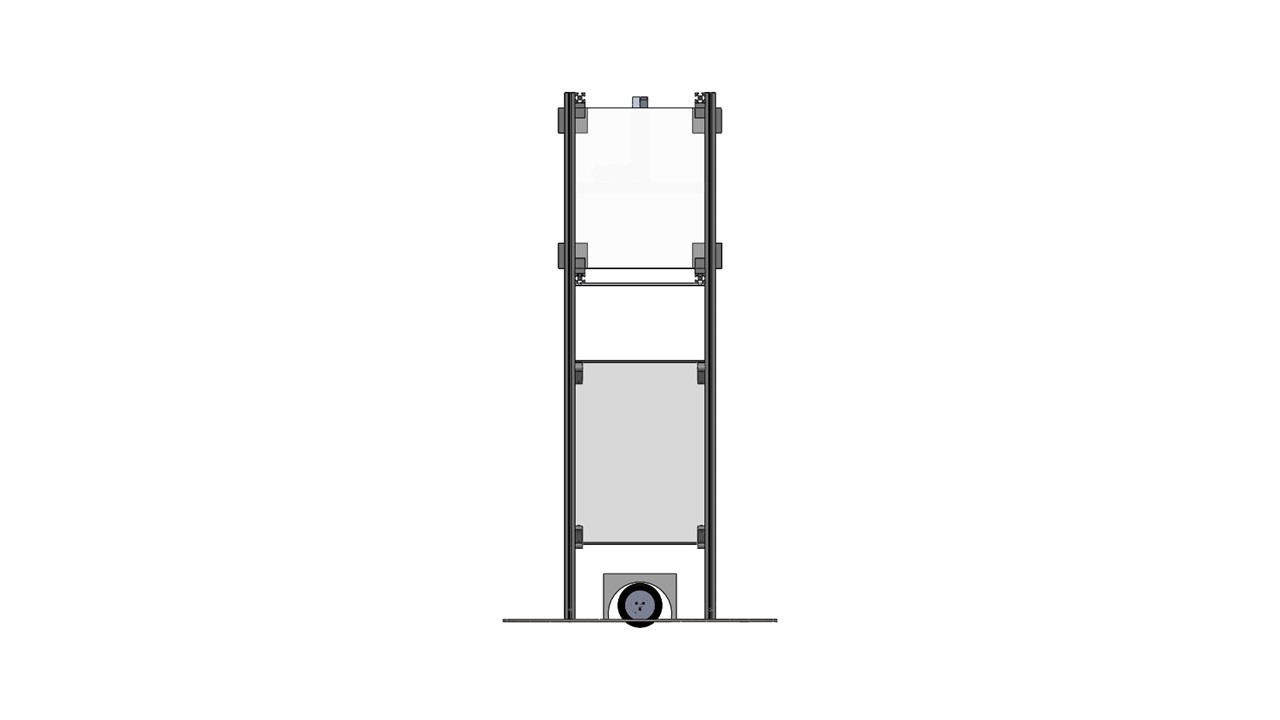
としょかえるの全体図を図1に示す。外装はプラスチック段ボールを用いて作製する。
3面図を以下に示す。直径はmirs2201の標準機の大きさより少し大きく、高さは作業しやすい高さとなっている。

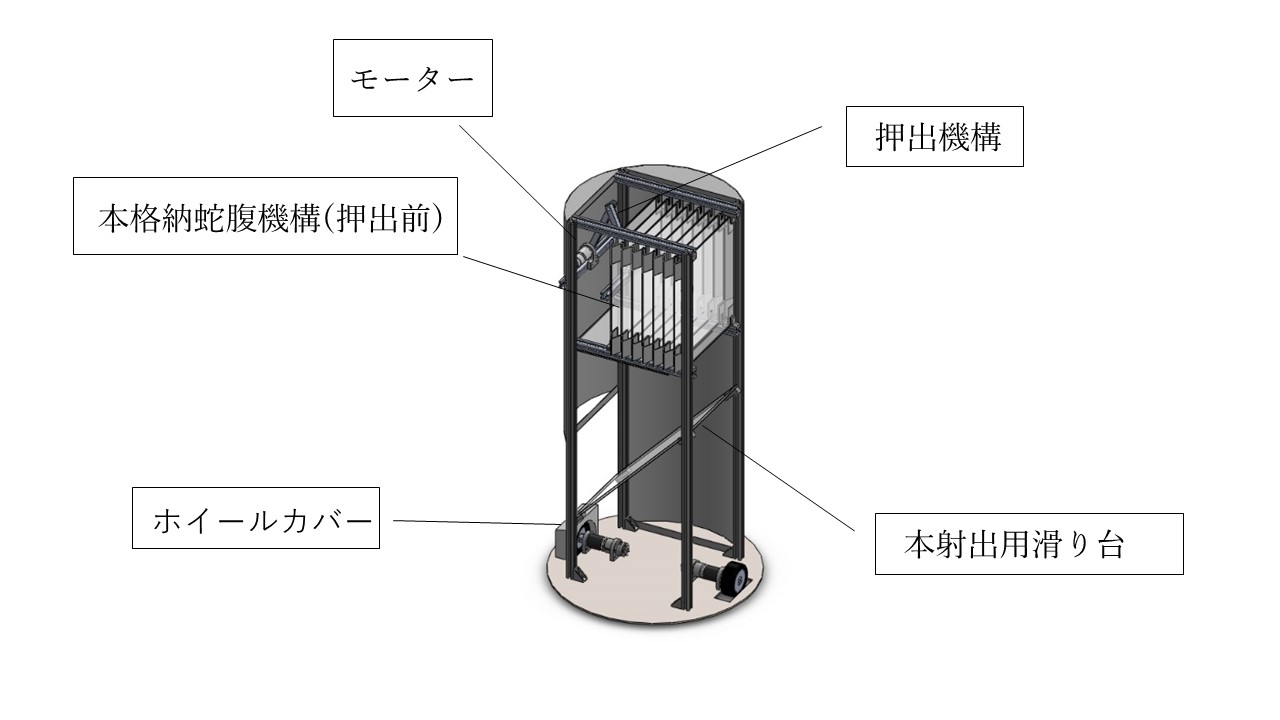
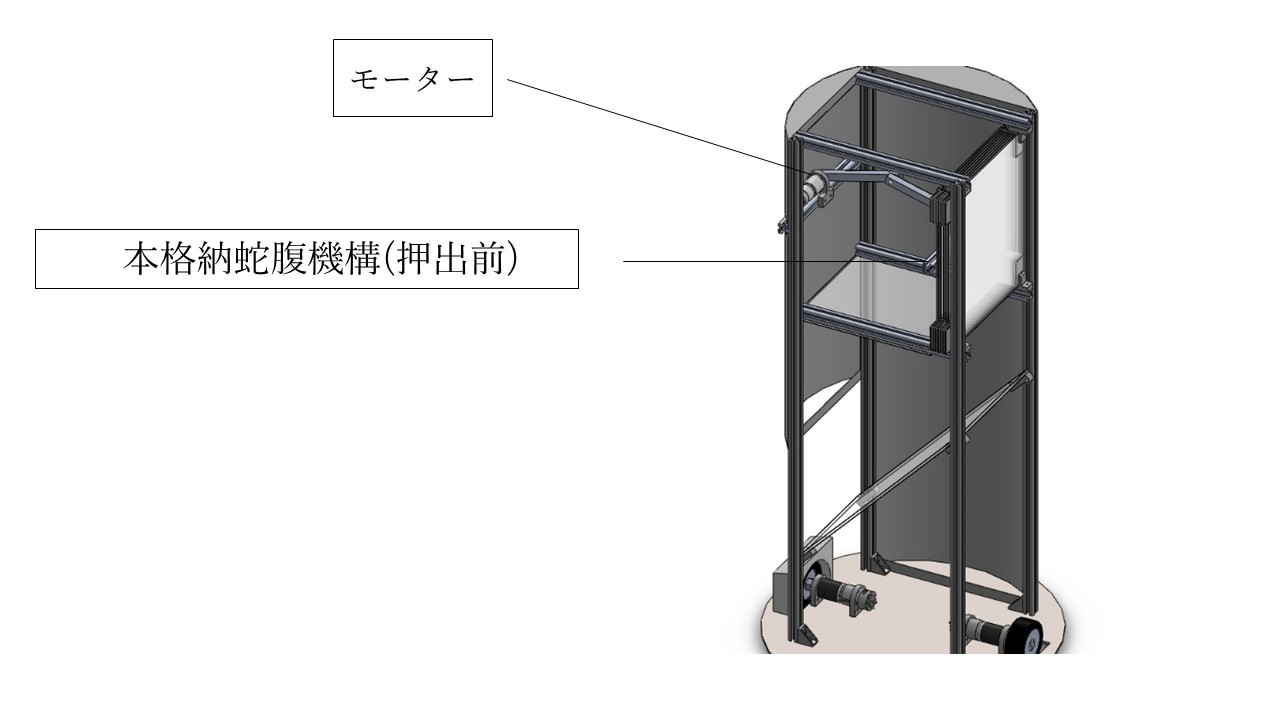
内装を以下に示す。想定している本の厚さは30mmであり、最大7冊入れることができる。背表紙を下にして本を挿入することを想定している。


| 名称 | MIRS2201 基本設計書 |
|---|---|
| 番号 | MIRS2201-DSGN-0002 | 現在時刻 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2022.10.07 | 石井虹太朗 | 第1版 | |
| A02 | 2022.10.14 | 石井虹太朗 | 第2版 | |
| A03 | 2022.10.17 | 石井虹太朗 | 青木先生 | 第3版 |
| A04 | 2023.1.06 | 石井虹太朗 | 青木先生 | 第4版 |
| 役職 | 名前 |
|---|---|
| メカニクス | 中村 優日 |
| メカニクス | 小柳津 拓馬 |
| エレクトロニクス | 勝間田 早矢 |
| エレクトロニクス | 鈴木 早紀 |
| エレクトロニクス | 加藤 諒耶 |
| エレクトロニクス | 石井 虹太朗 |
| ソフト | 渡部 冬哉 |
| ソフト | 杉浦 いぶき |
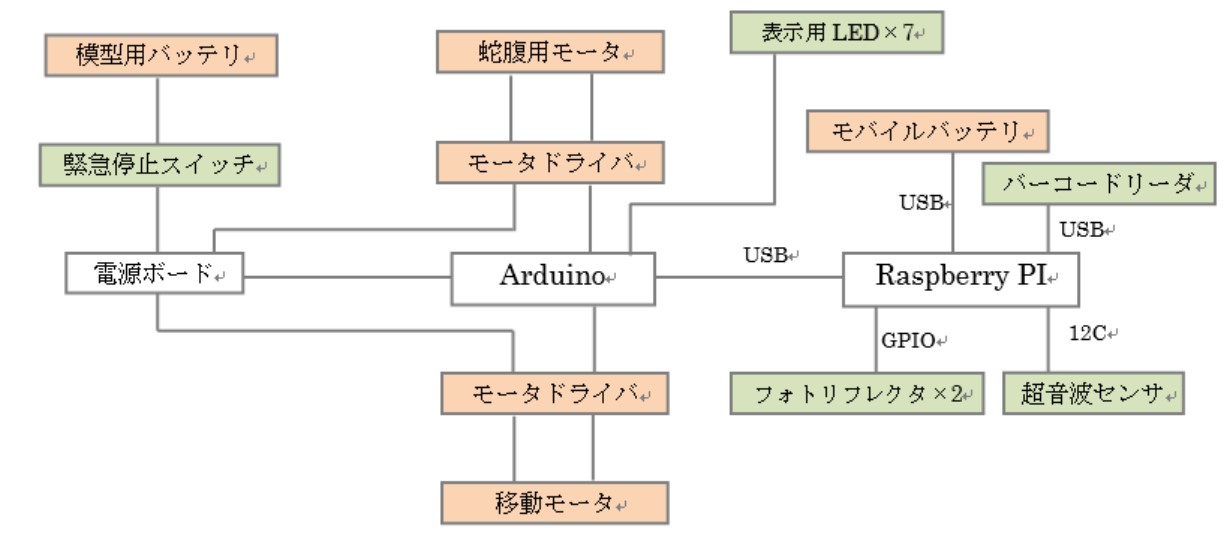
| 名称 | 電圧[v] | 供給先 | 供給方法 |
|---|---|---|---|
| モバイルバッテリ | 5 | RaspberryPi | USBケーブル |
| 駆動用バッテリ | 7.2 | モータドライバ(移動用R) | 電源ボードを介したワイヤ |
| モータドライバ(移動用L) | |||
| モータドライバ(蛇腹用) |
| 名称 | 個数 | 使用用途 | 通信方法 | メーカー・型番 |
|---|---|---|---|---|
| 緊急停止用スイッチ | 1 | 緊急時に動作を強制的に停止するため | ケーブル(バッテリと電源ボード間) | マルヤス電業 A30PMD01 |
| 超音波センサ | 2 | 周囲の障害物との距離を測定するため | 12c(RaspberryPi) | ZhiweiRobotics FRS02 |
| フォトリフレクタ | 2 | ライントレース走行のため | GPIO(RaspberryPi) | Letex Technology LBR-127HLD |
| バーコードリーダー | 1 | バーコード情報取得のため | USB/シリアル通信(RaspberryPi) | モノタロウ 53828313(仮) |
| 名称 | 個数 | 使用用途 |
|---|---|---|
| LED | 7 | 本の収納場所7箇所に沿ってLEDを取り付ける。片付けたい本のバーコードをまとめて読み取ると収納場所7箇所のどこに収納するか、としょかえるが指定する。その際に7つの各LEDを点灯しユーザーに指定の収納場所を示すため。 |
| 名称 | 個数 | 使用用途 | メーカー・型番 |
|---|---|---|---|
| モーター(移動用R) | 1 | 移動のため | 朱雀技研 KS5N-IG36P |
| モーター(移動用L) | 1 | 移動のため | 朱雀技研 KS5N-IG36P |
| モーター(蛇腹用) | 1 | 蛇腹機構制御のため | マブチモーター RS-385PH-2465 |
| モジュール名 | 概要 | 衝突防止 | バーコード読み取り | 本の順番の指定 | ライントレース | 本の射出 |
|---|---|---|---|---|---|---|
| io(既存改良) | GPIOの読み取り | |||||
| uss(既存改良) | 超音波センサの値の取得 | ○ | ○ | |||
| arduino(既存改良) | Arduinoとの通信 | ○ | ○ | |||
| request(既存改良) | Arduinoへの命令 | ○ | ○ | |||
| barcode(新規) | バーコードの読み取り | ○ | ||||
| sort(新規) | 本のソート | ○ | ||||
| raspi_mode(新規) | 各種モード切替 | ○ | ○ | ○ | ○ | ○ |
| reflector(新規) | 光センサの読み取り | ○ | ||||
| trace(新規) | ライントレース | ○ | ||||
| push(新規) | 本の射出 | ○ |
| モジュール名 | 概要 | 衝突防止 | バーコード読み取り | 本の順番の指定 | ライントレース | 本の射出 |
|---|---|---|---|---|---|---|
| slave(既存改良) | 各種の処理と実行を行う | ○ | ○ | ○ | ||
| raspi(既存改良) | Raspberry Piとシリアル通信を行う | ○ | ○ | ○ | ||
| run_ctrl(既存改良) | 走行制御 | ○ | ○ | |||
| vel_ctrl(既存改良) | 速度制御 | ○ | ○ | |||
| motor(既存改良) | モータ制御 | ○ | ○ | ○ | ||
| distance(既存改良) | 走行距離取得 | ○ | ○ | ○ | ||
| encoder(既存改良) | エンコーダ読み取り | ○ | ○ | ○ | ||
| io(既存改良) | GPIO読み取り | |||||
| LED(新規) | LEDの制御 | ○ |
表7 購入部品一覧
| 物品名 | 型番 | 単価(税込み) | 数量 | 価格(円) | 商品URL |
|---|---|---|---|---|---|
| バーコードリーダー | 53828313 | 3729 | 1 | 3729 | 販売ページ |
| 滑車 | K50-05 | 1493 | 3 | 4479 | 販売ページ |
| アルミフレーム | NFS5-2020 | 6000 | 1 | 6000 | 販売ページ |
| アルミプレート | L-PNLNP-500-500-3 | 5000 | 1 | 5000 | 販売ページ |
| プラスチック段ボール | 4609 | 1 | 4609 | 販売ページ | |
| アクリル板 | 2409 | 1 | 2409 | 販売ページ | |
| フォトリフレクタ | LBR-127HLD | 50 | 4 | 200 | 販売ページ |
| 模造紙 | 439 | 2 | 878 | 販売ページ | |
| 合計 | 27304 |