| 名称 | MIRS2105開発完了報告書 |
|---|---|
| 番号 | MIRS2105-REPT-0003 | 現在時刻 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2021.02.25 | 柴田 光咲 | 初版 |
目次
1.初めに2.制作物
3.制作物
4.発表会振り返り
5.スケジュール評価
6.開発における作業工数分析
7.各パートの総括
8.みんなの所感
1.はじめに
本ドキュメントは、PHOTOKENプロジェクトの開発完了報告書について記述したものである。
2.制作物



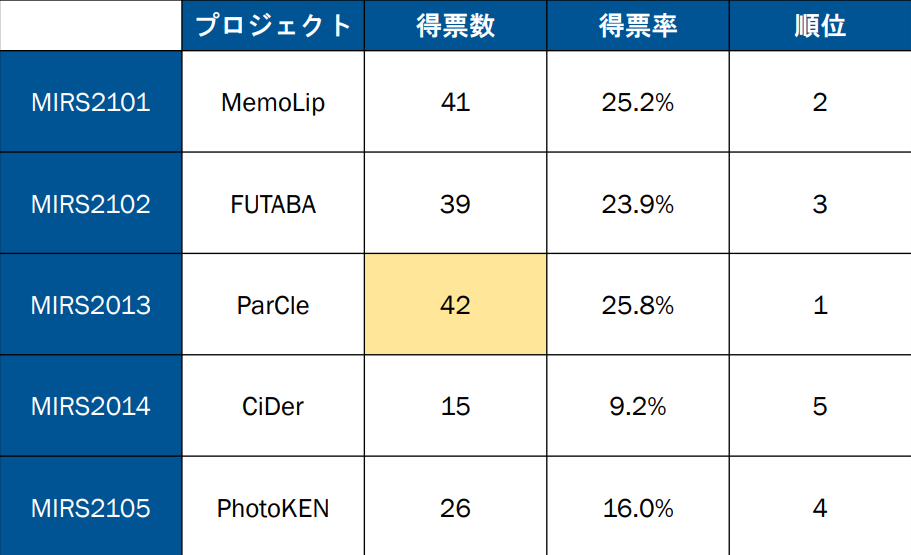
3.発表会振り返り
発表会・展示会における結果は以下の通りである。発表会 4位
技術評価 4位
実際の評価を示す。

発表会の振り返り
- 全体的に開発が遅れてしまい、発表会準備やブース設営等に時間をあまりさくことができなかった。
- 班員の緊急事態にも臨機応変に対応できた点は、とても良かった
- 班員が少ないなか、もっと工夫して役割分担を行えると良かった。
- もっとマイクを上手く使いこなせるようになりたい。
- ブースでの機体の見せ方、機能の見せ方をもっと工夫するだと感じた。そこが改善できていれば、発表会での投票ももう少し伸びたと思う。
- 重視していたコンセプトが評価されたのはとても良かった。結構はっきりとしていたユーザの評価が低かったのは意外だった。
4.全体実現度の評価
始めに各機能の実現度の評価をtab.1に示す。
| 機能 | 評価 | 完成度(%) |
|---|---|---|
| 画像認識 |
OPENCVを用いた画像認識は、とても精度良くできた。実際に想定している家庭の中を想定して、人がある程度動いても精度良く判別できていたので 良かった。また笑顔の認識においても、笑顔の強度を判定し想定したよりも高い精度で笑顔を判定していたので、機能としては十分目標に達してい いると考え、実現度は100%とした。 |
100 |
| 追尾機能 |
カメラ機構、頭部回転機構を用いた人間の追尾は、ある程度完成させることができたが、外装だったり、頭部の重さの影響でトルクが足りなかったり 上手く回らないことが多かった。発表会当日のブースでも、この追尾機能を見せることができなかった。また、駆動部分における追尾は、開発が遅れて いたため、機体に実装することができなかった。当初、予定していた、機体が、ユーザを追いながら、カメラ機構等を用いて画角を調整するという理想とは ほど遠い機能になってしまった。このことから実現度評価は半分の50%とした。 |
50 |
| 写真撮影機能 |
画像認識と組み合わせて、笑顔の瞬間に撮影するという想定していた最低限の機能は実装することができた。しかし、想定していたPHOTOKENが動きながら、ユーザ の笑顔だったり、何気ない日常の写真を撮るという部分では、機体の駆動の動きとの統合ができず、想定していた動きを達成できなかったので、実現度は70%とした。 |
70 |
| 画面表示機能 |
PHOTOKENのもつディスプレイに様々な機能を表示することができた。本体との統合も問題なく実装することができた。天気を表示したり、撮った写真をLINEに したり、撮った写真をスライドショー形式に表示することも実現できた。じゃんけん機能だったり、人を楽しませることもできていたので、機能としては十分だと 考える。 |
100 |
| 衝突回避機能 |
超音波センサを用いた衝突回避機能だが、実装まで実現したが、超音波センサの調整不足により、前方の障害物にぶつかることが多かった。また他の機能との統合が 間に合わなかったため、デモで見せることができなかった。そのため、実現度は60%とした。 |
60 |
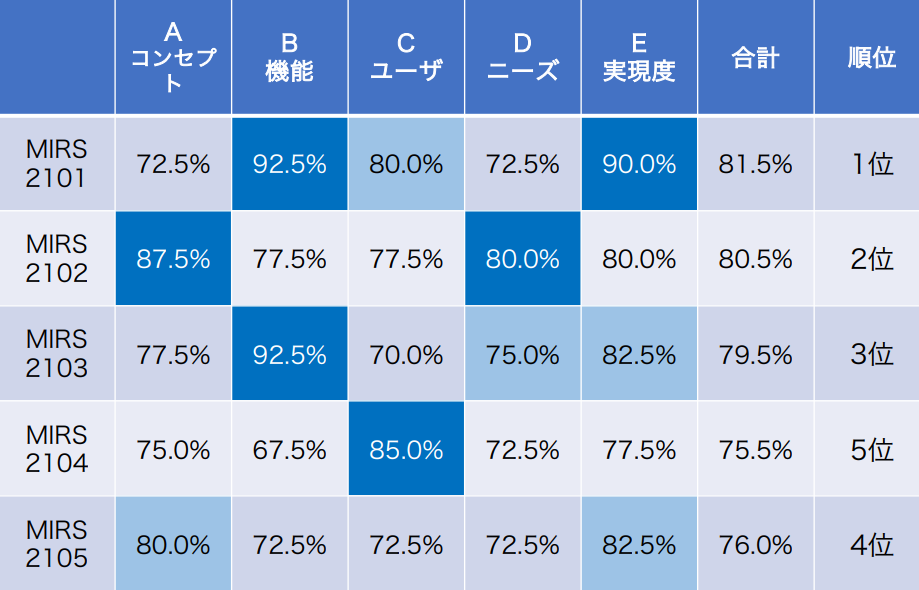
| 評価項目 | 評価 | 審査員評価点 |
|---|---|---|
| コンセプト |
「新たな家族の一員に、日常カメラワン」というコンセプトのもと、家族と写真のつながりをとても意識した。ただの写真ではなく何気ない日常の写真に焦点をあてたことで、製品コンセプトが伝わりやすかったため 評価が比較的高かったのではないかと考えられる。また、外装にこだわったのも、ここの評価に繋がったと考える。 |
80.0 |
| 機能 |
実現度評価から見ても、機能はほぼ半分程度しか完成せず、デモや発表会では、最低限の機能しか来場者に見せることができなかった。そのため他の班と比べて機能が圧倒的に少ないロボットに見えていたと考えられ 低い評価になってしまったと考えられる。デモでは、笑顔認識を用いた写真撮影と、トラッキングの2つしか機能を見せることができなかった。そのため、一つ一つの機能がすぐに終わってしまい、良さがあまり伝わ 伝わらなかった。実際に家にいる想定をデモで見せれると、機能だけではなく、コンセプトの評価にも繋がるのではないかと思う。 |
72.5 |
| ユーザー |
自分のなかでは結構はっきりしていたユーザの評価が低かったのは意外だった。ユーザの評価が高かった他の班と比べてみると、プレゼンにその違いがあると感じた。もっと全面的に、ユーザをはっきり伝える ことでここの評価も変わってくると感じた。来場者が、1,2,3年が主であるため、もう少し先の未来をこのロボット使って見せれるといいと感じた。 |
72.5 |
| ニーズ |
ここはプレゼンだと感じた。もっと具体的なグラフだったり、説得力のある背景を強調して言えたら変わってくると思う。また、PHOTOKENのユーザが親であることも、このロボットのニーズが伝わり切らなかった原因でもあると 感じた。このロボットは「絶対に必要!!」というよりは「あったらいいね」なので、ニーズは弱くなりがちだが、そこをプレゼンで補っていくべきだったと感じた。このロボットの必要性をあまり伝えきれていない気がした。 |
72.5 |
| 実現度 |
近年のこのような家庭用ロボットは、市販されるものも増えてきて、今後、増えていくと考えられるため、実現度の部分で評価されたのではないかと考える。社会実装を行うことができれば、ここの評価をさらに上げることができる 感じた。また、機能を十分に見せることができなかったので、もし見せることができていたら、さらに評価を伸ばすことができたと思う。 |
82.5 |
| 総合評価 |
自分たちが当初、目標としていたmirsは作り上げることができなかった。作成や実装、統合の遅れが、このような結果に繋がってしまったと考える。プレゼンに関してももっと工夫して、ユーザだったり、開発背景を伝えきれる プレゼンにできたと思う。デモに関しては、最低限の機能をより魅力的に伝える方法をあらかじめ考えておくべきだと感じた。しかし、色々なことが起きても、臨機応変に対応し、発表会までやり遂げることができたので良かった。 社会実装を行うことができなかったのも、全体の評価が低い要因だと感じた。ロボットのコンセプトから実際に動いている場面だったり、機能をユーザに使ってもらうことによって、ニーズだったり、実現度の評価が上がるのではないかと感じた。 もし、グットデザイン賞があったら、僕たちの班が一番いいと思う。 |
76.0 |
5.スケジュール評価
詳細設計前のガントチャートと、実際のガントチャートを以下に示す。

ガントチャートを比較してみると、
①メカ・エレキ・ソフトともに前半の設計段階で予定より遅れが出ている
②エレキ、メカは詳細設計の承認に時間がかかってしまっている。
③ソフトの前半から開始する予定だった機体の駆動系のプログラムの実装ができていなかった。
④システム統合の時間が予定よりはるかに短くなってしまっていた。
⑤メカの設計開発がかなり遅れていた。
ということがわかる。tab.3にこれらの反省点をまとめる。
| 番号 | 反省 | 改善案 |
|---|---|---|
| ①と② | テスト期間に想定していた作業量よりも圧倒的に作業量が少なかった。ここで、作業量の少なさに気づいてテスト期間が終わった瞬間に急ピッチで作業を進めていくべきだった。そうせずに、テスト期間分作業を 遅らせたのが、開発の遅延の大きな原因だと思う。メカエレキ共に想定していた時期に詳細設計を通すことができていなかった。メカのセンサ類の配置、モータの選定が遅れてしまい、それに伴ってエレキの詳細 設計が、遅れてしまった。 | まず、ガントチャートをもっと詳しく作るべきだったと感じた。そのために基本設計の部分をもっと詳しく例えば、作業の工数の把握、使う部品の大きさ、特性の把握まで、徹底して行うべきだった。 開発に遅れが出た時にどれくらいの遅れが発生しているのかがさらに分かりやすくなると思う。 |
| ③ | どのセンサを、どれくらい使うのかがはっきりしていなくて、ロボットをどう動かすかがあいまいなまま、詳細設計と通さずに開発をはじめてしまった。アジャイル開発の落とし穴だと思う。結局最後まで、駆動部の プログラムの実装に時間がかかり、納得のいく動きが実現できなかった。 | まず、動作シナリオに合わせた基本的な動作プログラムを、実機で作成していくべきだと感じた。それに合わせたメカとエレキの協力も不可欠だと感じた。基本的なプログラムをまず完成させることで より実機の動きをはっきりとさせ、そこにアジャイル開発を行うことで、改善していくとよりよいものができた気がする。 |
| ④ | 全体の開発の遅れが、システム統合の時間の不足に繋がった。基本設計、詳細設計の時点で、もっと自分たちの制作するものについてはっきりとさせるべきだった。また、統合する際に、発生した問題に関して それの解決に時間がかかり、スムーズな統合ができなかった。 | 開発の遅れについては、①②③で述べたことを実行すると改善できると思う。しかし、統合時に発生する問題は、予測するのがとても難しく原因の解明に時間がかかる場合が多いと思う。システム統合の時間を多めに 計画していくことや、開発の経験や、勉強した知識が、このような問題に直面したときに、助けになると痛感した。 |
| ⑤ | メカが遅れてしまい、全体の開発に大きな遅れが生じてしまった。まず、3Dプリンタをもっと計画的に使うべきだと感じた。100%で、出力してはいけない。部屋の温度だったり、出力する部品の形状により 出来上がりがかなり違うので、何回もやり直した。そこが時間の大幅ロスに繋がったと感じた。また、部品を組み立ててから生じた問題に対して、解決に時間をかけすぎた。沢山試行錯誤することは大切 だが期間を設けられるプロジェクトに対しては、ある程度の妥協が大切だと感じた。ドキュメント整備に時間がかかってしまっていた。全員で、それぞれドキュメント整備するのではなく、誰がやるかを決めた方が スムーズに進むのではないかと感じた。 | 3Dプリンタを用いて作成する部品は、ねじ切りする場合でも、80%で十分である。組み立てで発生した問題に対しては、期間を設けて、改善案を探すべきだと感じた。ドキュメント整備については、メカの班員を 一人ドキュメント整備に集中させることで、無駄な時間を削減できると感じた。 |
- ガントチャートが少し大まかすぎたと感じた。もう少し細かい作業で分割できると作業の遅れの明確化に繋がると感じた。
- 社会実装を行うことができなかった。生活の中でのロボットであるため、社会実装までいかなくとも、頭部回転機構とカメラ機構を用いてラボでのみんなの様子をモニタリングする等の、デモを行えると良かったと感じた。
6.開発における作業工数分析
個人毎の工数分析(各個人)
Fig.2からFig.8に各個人の工数分析グラフを示す。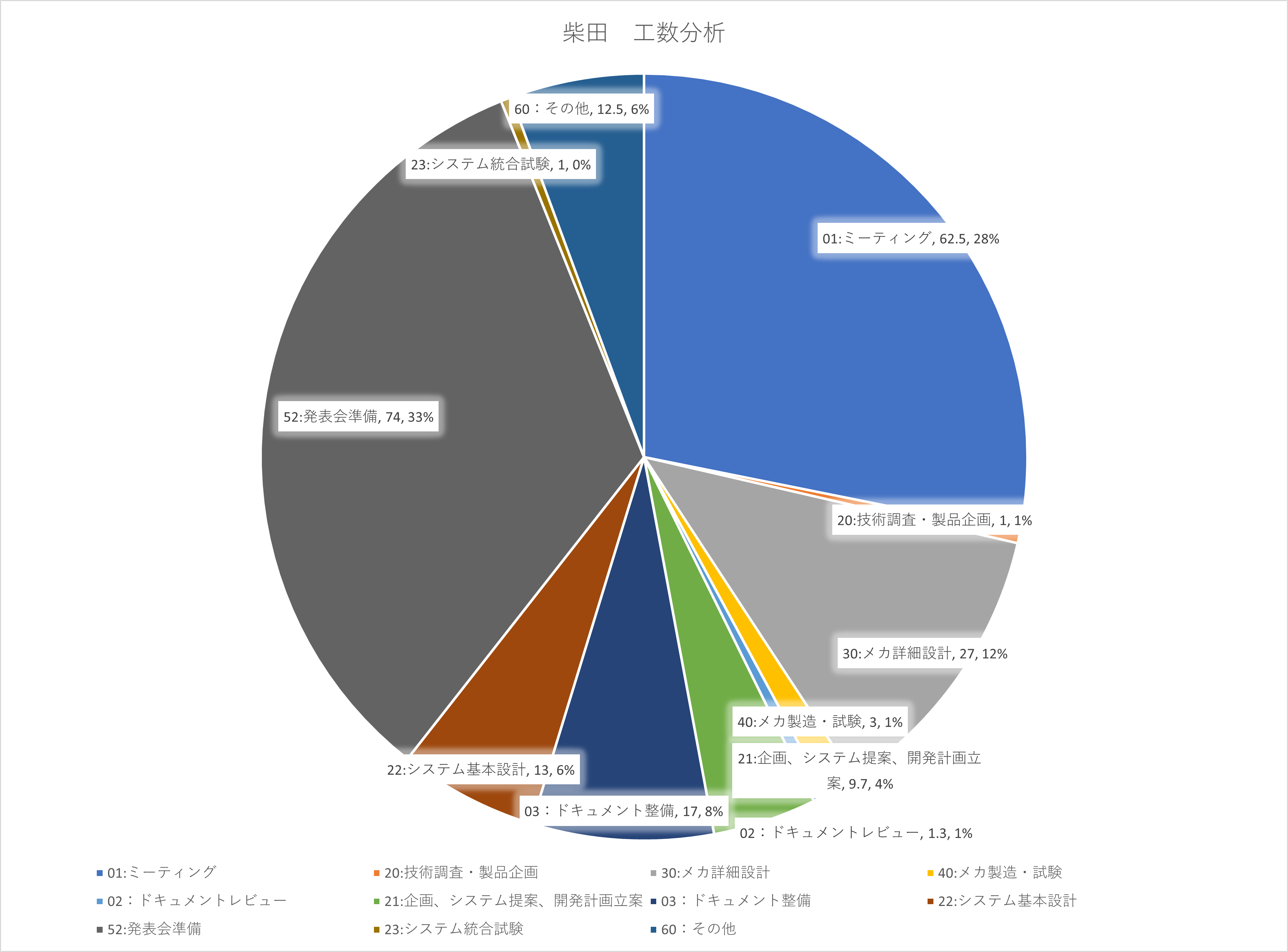
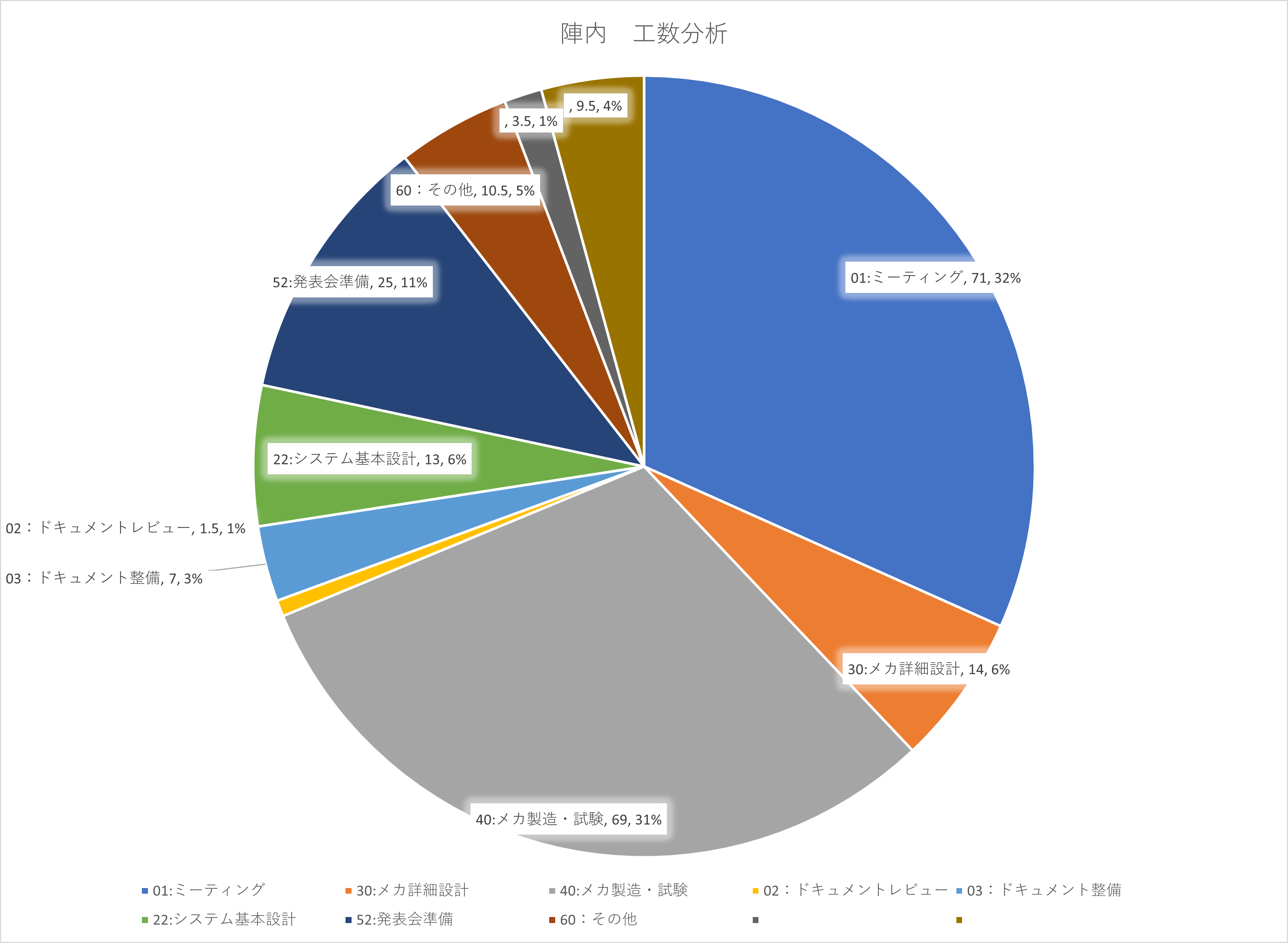
Fig.2 柴田工数分析(222時間) Fig.3 陣内工数分析(225時間)
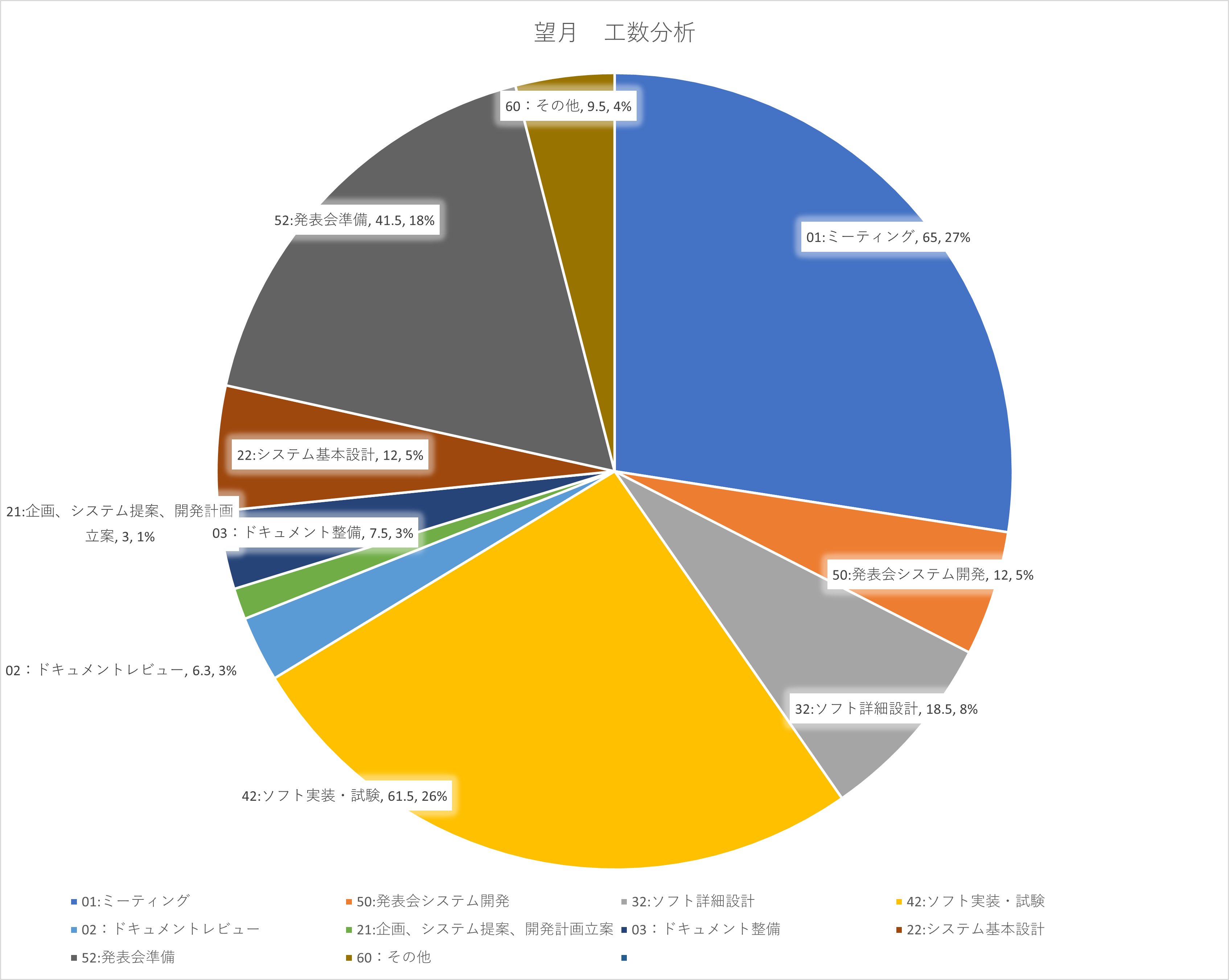
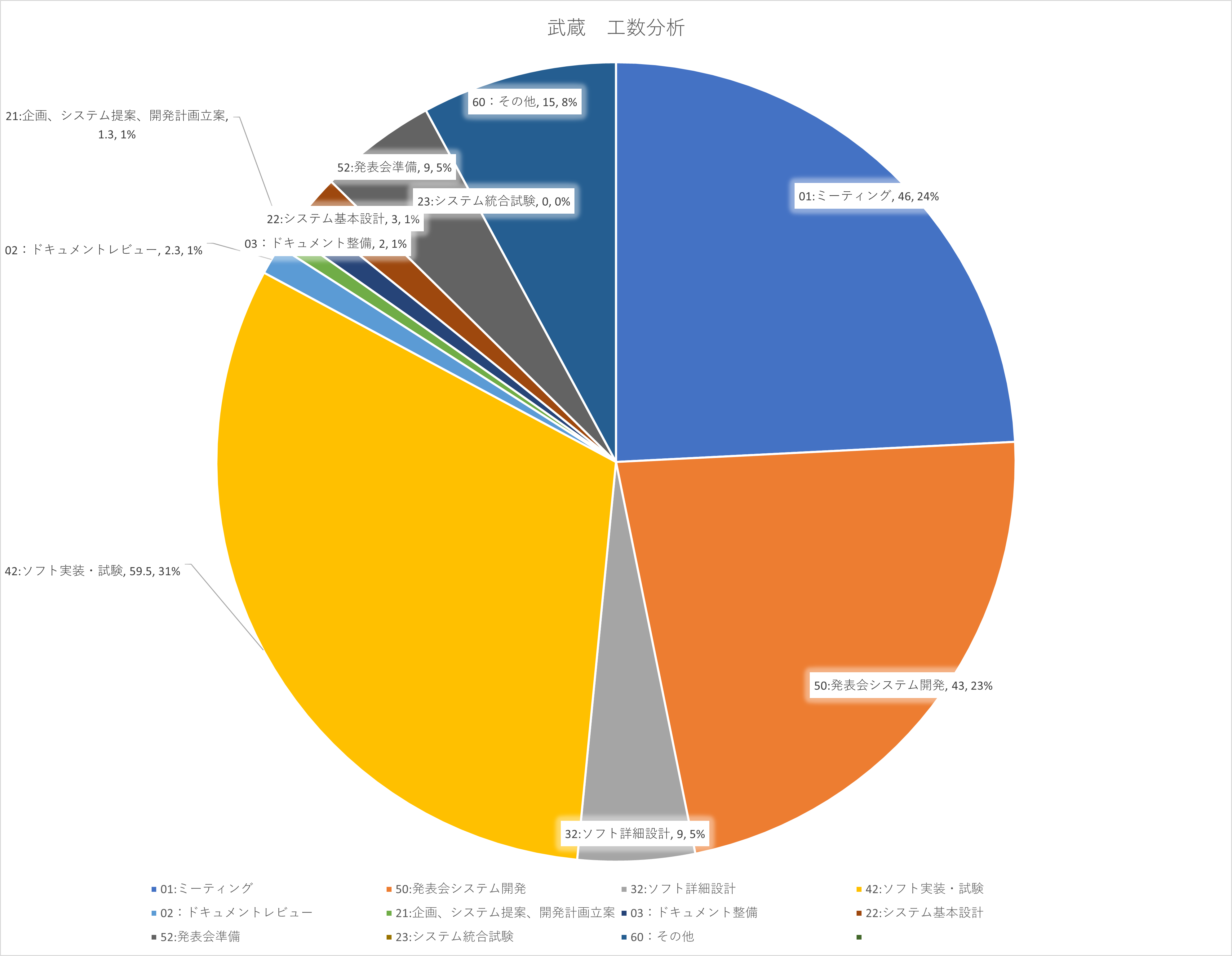
Fig.4望月工数分析(236時間) >Fig.5 武蔵工数分析(190.1時間)
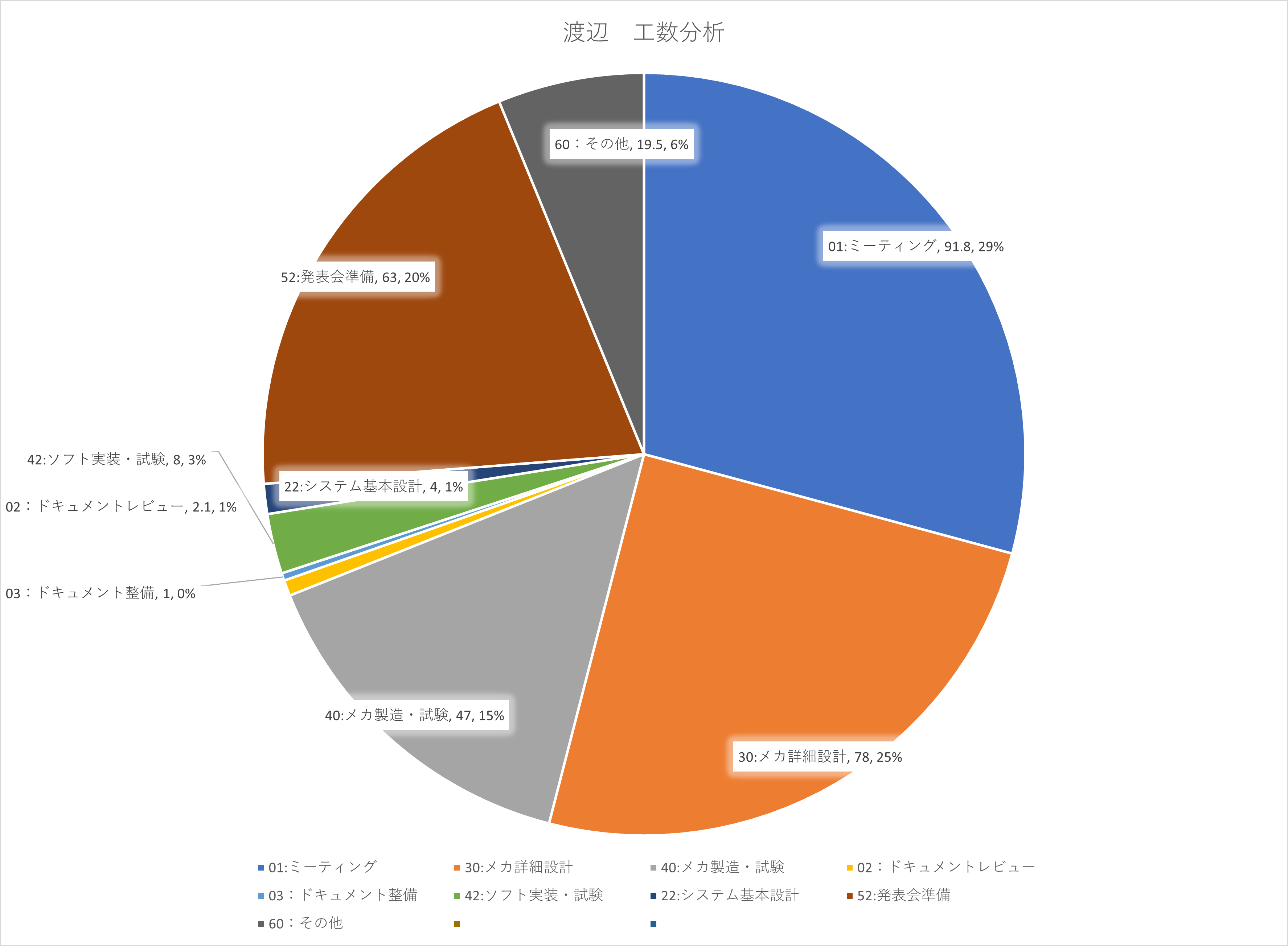

Fig.6 渡邊工数分析(314.4時間) Fig.7 植田工数分析(150時間)
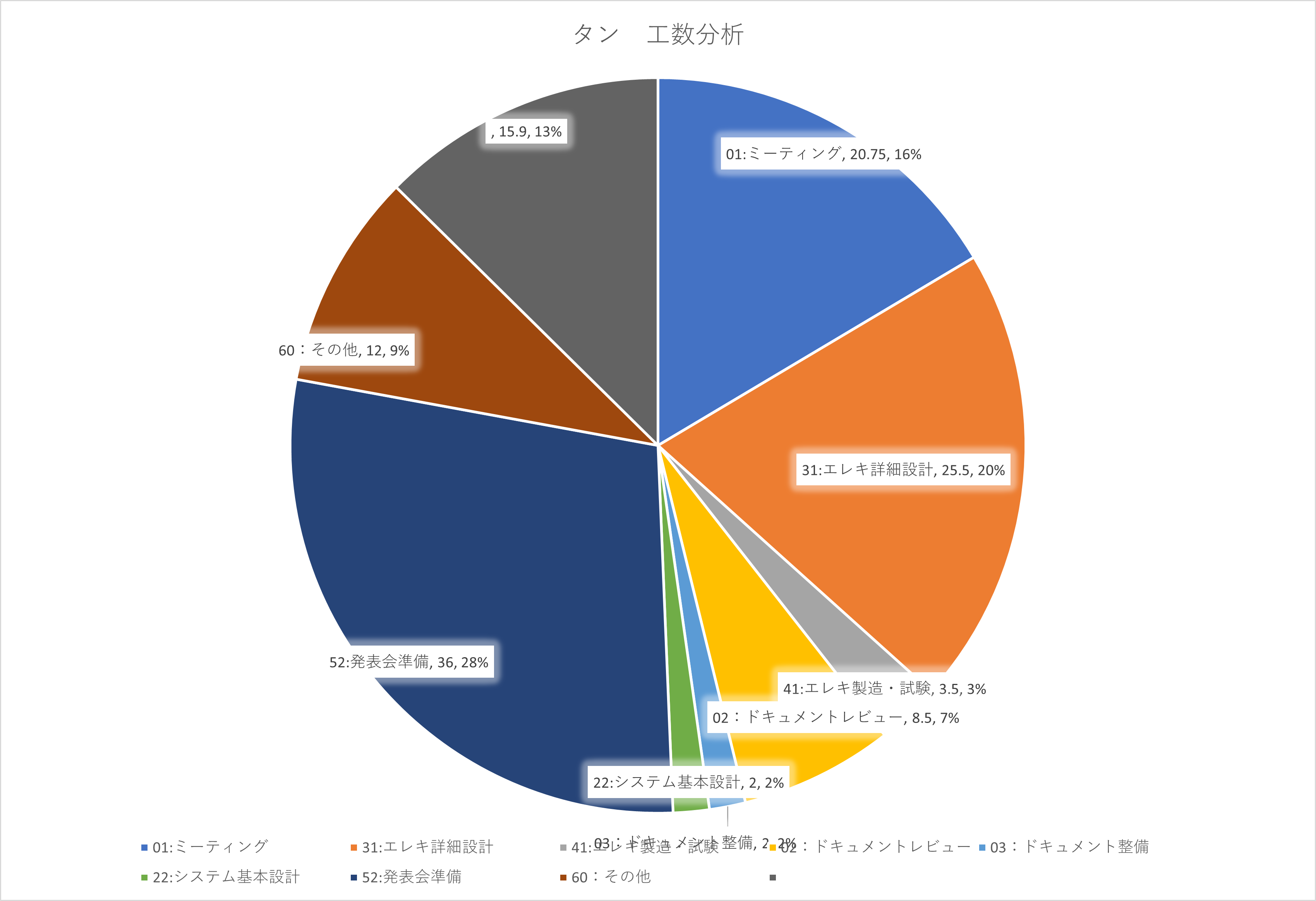
Fig.8 フイスエン工数分析(147.15時間)
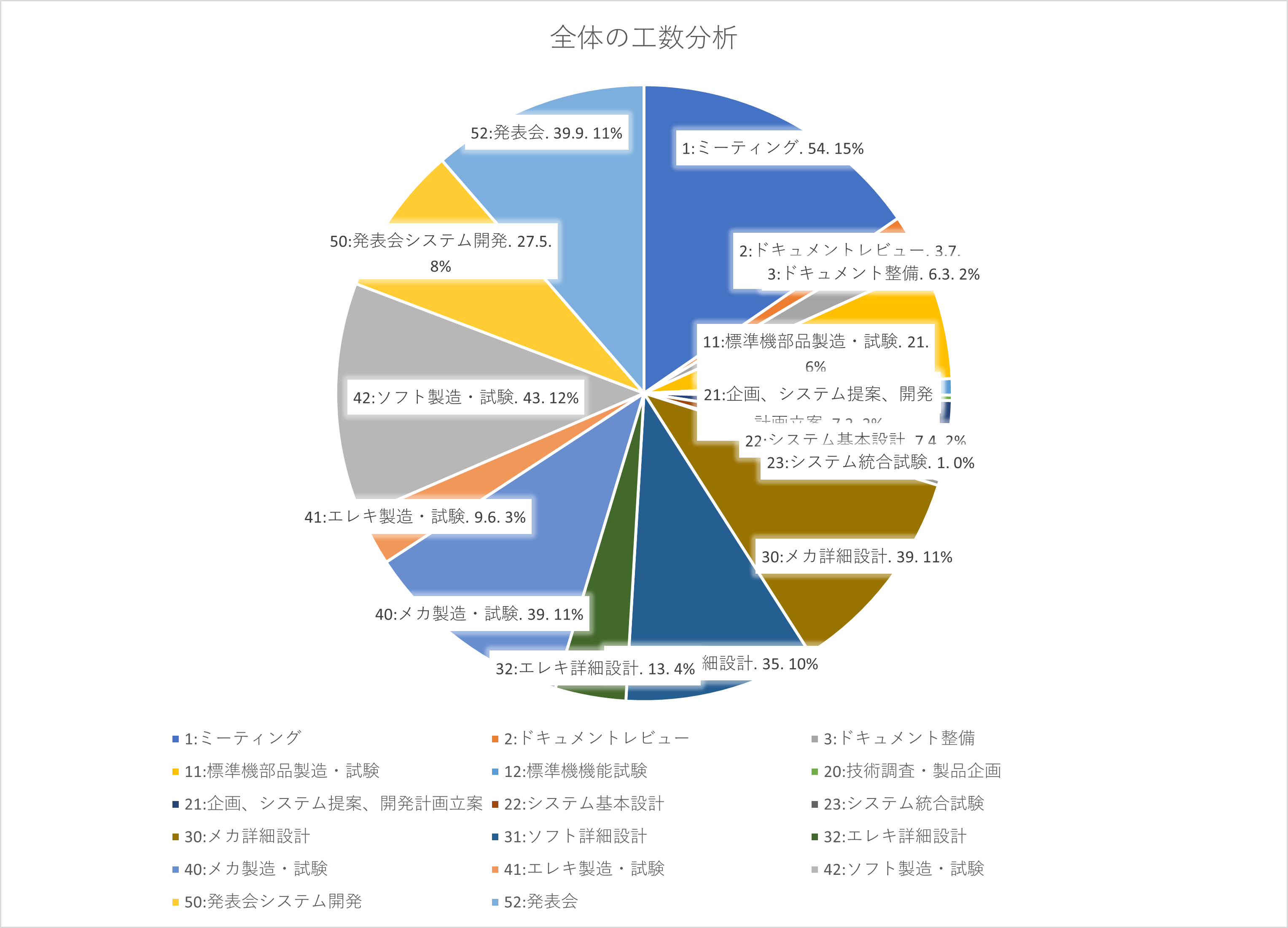
Fig.8 全体の工数分析
アイデアを考えるミーティングから、システム開発、詳細設計までの時間が、各パートの製造にかかった時間よりも長くなっていてしっかりと考えてから製造を行うことができていることが読み取れる。
しかし、ソフトだけに注目してみると、製造、試験の時間の方が長くなっていることがグラフから読み取れる。これは、アジャイル開発を行ったためだと考えられる。発表会にかけた時間に関しても、少し割合が低いことが読み取れる。
各パートの製造、試験にかかった時間は、多いほうからメカ、ソフト、エレキの順であった。各パート基本設計、詳細設計をもっと時間をかければ、スムーズに製造、試験ができると思う。
7.各パートの総括
メカ
当初予定していた通りの機能を実現することができた。機構ごとに担当者を分けたため効率的な開発ができたと考えられる。
また、メカ全体で情報を共有し意見交換を行った事により、修正点や改善点を早い段階で発見することができた。工場での加工と3Dプリンタでのパーツ製作をうまく使い分けたことで作業効率を高めることができたと考えられる。
外装はとても可愛く仕上げることができたため、大成功といえる。
エレキ
最後には制作物を作成出来たが、予定通りに作業を進めることが出来なかった。基盤の作成に取りかかるのが回路設計が終わった後だった為、大幅に遅れてしまった。
設計が終わったところから平行して基盤作成に取り組むべきであった。
ソフト
今回ソフトでは”photoKEN”という機体を通して、カメラで送られてきた⼈の位置情報を
もとにモータを制御、また笑顔認識やタッチディスプレイの動作プログラムの作成など、
幅広く活動をおこなった。各詳細設計開始ごろは本体ができるまでモータ制御等の試験、
調整ができず、発表⽇付近で慌ただしくなるということがあったが、当⽇問題なく認識、
画⾓調整することができてとても良かったと感じた。笑顔認識やタッチディスプレイ等の
機能は、基本的に調べながらの作業であったため、⾃分達の中で解釈、応⽤する⼒が⾝に
ついたと感じた。また、機能の⼀つであるLINE送信機能や天気受信機能はこれからさま
ざまなことに使えそうなので、是⾮⾃分達はもちろんのこと、来年以降”mirs”を⾏う⼈た
ちに役に⽴てばと使⽤⽅法や応⽤例を残しておきたいと感じた。今回の製作の中で、細か
なゲイン調整や、コンパイルエラーの対応など、何度も壁に当たることがあり⾟い思いを
したが、この経験を粘り強さに変え、これからの卒業研究やその先の⾃分達の活動に活かしていきたい。
7.みんなの所感
柴田
プロジェクトリーダーとして、ロボットを完成させることに難しさを痛感した。途中からプロジェクトリーダーになって計画を進めたが、
予想外のことが起きたり、計画が遅れたりしたがなんとか発表会まで、成功させることができたので、良かった。メカ担当の部分では、一
から3DCADを用いて、部品を作成し、カメラ機構の制作を行った。納得のいくものができたので、とても貴重な体験になったと思う。brenderや
、動画編集など、はじめて行うことも多く、とても難しかったが、勉強になったと思う。また、プロジェクトを進めていくなかで、役割分担の
難しさを感じた。人の得手不得手をしっかりと理解し適材適所な役割分担は簡単にできるものではないなと感じた。また、メンバー間のコミュニ
ケーションの大切さは、プロジェクト中、意識をしていたけど、自分の作業に手一杯になってしまうときにおろそかになって
しまっていたと思う。このmirsを通して、自分の短所がはっきりしたと感じた。自分の短所が、はっきりとする経験はなかなか多くあるもので
もないと思うので、貴重な経験ができたと思う。
陣内
チームリーダーとして、フォトケンプロジェクトをなんとか成功させることができたので良かった。
自分はメカ担当だったが、エレキのシールド作成を手伝うなど他の箇所のフォローをすることもできたので良かった。
担当した頭部回転機構では、購入したモータードライバの性能上ステッピングモーターのトルクが十分に出せず、発表会直前でモーター・モータードライバともに変更が必要になった。
そこで、冷静に状況を整理し即座に必要なパーツの設計、印刷、組み立てを行い、シールドに変更を加え実装することができた。変更した頭部回転機構は問題なく動作したので良かった。
外装はCADを用いて型紙を作ることにより現物合わせよりクオリティの高いものにすることができた。耳、鼻、目、尻尾など細かいところまでこだわり、非常に可愛いものに仕上げることができた。
クラスメイトや他学年に高い評価をもらい、フォトケンを可愛がってもらえたため非常に満足できる成果となった。
自分の担当した仕事については納得のいく結果を残せたので良かった。
望月
Mirs を終えて最初に感じることは、どこも本当に頑張った、お疲れ様ということである。
今回mirs2105班ソフト担当として、photoKENの重要機能であるカメラやタッチディスプ
レイの各操作プログラムの作成、またDM としてドキュメントの管理を⾏なった。授業で
習った内容もあったが、基本的には⾃⾝で調べながらでの作業であったため、⾃分で調べ、
どのように⾃⾝で応⽤できるかの⼒がかなり強く⾝についたと感じた。⾃⾝の班はもちろ
んのこと、他の班も夜遅くまで学校に残り作業をしていたのを⾒ると、どこの班も当⽇発表
できて本当に良かったと思いました。
武蔵
約1年間、PhotoKenプロジェクトにソフトとして関わり、多くの経験を得ることができたと思う。まず、システム提案の段階では班員が集まって会議を開き
、1から案を練っていくことが大変ではあったが、特に案を広げるための話し合いと案を絞り込むための話し合いの違いをうまく切り替えられなかった。
そして、自分がどのような話をすれば話し合いがスムーズに行えるかを意識しながら会話できるようになったと思う。次に、ソフトの開発を進めるにあたって
痛感したことは、自分にはプログラムの知識が浅く、ネットで調べながら作っていたので、プログラムを作り上げるのに時間がかかったことである。1番時間を
かけてしまったのが、pythonとcの間でのデータのやり取りで、途中で断念してしまったプログラムがあったので、そこで大きな時間ロスをしてしまった。
最後に、プロジェクトのメンバーとのコミュニケーションをもっと自分から行えればよかったと思う。基本的なことではあるが、チームのまとまりはやはり会話を
せずには得ることができないと強く思った。
フイ スエン
MIRSの授業で、ゼロから一つのロボットを作り出すまで、たくさん知識と技術を習いました。エレキの担当として、回路図の設計やケーブルの製作まで、
わからないことが多くて大変でしたが、班員が手伝ってくれて本当にありがたいです。また、この一年間を通して、いろいろな作業を実際に体験することが
できて、とてもいい経験でした。これから、MIRSで身につけたスキルを卒研や大学の研究に活用していきたいと思います。
植田
エレキのパートでは、降圧のための回路を1から設計したことが印象的だった。回路の目的、仕様、構成、使用物品などを自分ですべて決定すると言う経験を出来て良かったと思う。
また、回路が当初の目的通りの動きをしたときは嬉しかった。全体を通しての反省点は、他パートとの連携があまり出来ていなかったこと、自分の作業とエレキ全体の作業の2つを平行して計画的に進めることが出来なかったことである。
また、回路に対する勉強不足の面もあり、エレキの作業に遅れや訂正が出てしまった。いかなる場面でも勉強すべきと言うことを痛感した。班員にはたくさん助けてもらって感謝している。
パンフレット、ポスターの作成や演出でのPV撮影、編集は、いろんな人と関わり話し合いながら作業できて良かった。
渡邊
今年一年間のMIRSの開発を通して得た感想としては、とても大変でしたが、得るものが多く濃密な一年間であったと思います。
最大の課題はプロジェクトテーマとコンセプトの決定であったと思います。これは、一年間のMIRS開発の基準となるものでした。そのため決めるのに難航し、基本設計の段階になって最終的に決定することとなりました。
技術的な部分としては、機構やその部品の設計にかかわる部分についての知識や技能、特に3DCAD上での設計についての知識や技能が習得できたと思います。
MIRS2105ドキュメント管理台帳へ