
Fig.1 本体写真

| 名称 | 開発完了報告書 |
|---|---|
| 番号 | MIRS2104-REPT-0010 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A02 | 2021.3.31 | 石上航輝,浅野悠也,浦田楓真,尾崎優太, 依田典,平中行成, 平澤匡祐,落合駿 |
香川先生 | 第2版 |
Fig.1 本体写真
| 機能名称 | 概要 | 評価 |
|---|---|---|
| 横断機能 | 腕の先端についている手を握っている間のみ前進する機能。 | 子供と手をつないで横断を行える程度まで開発を実施することができた。 |
| 腕伸縮機能 | 所定の指示を送ることによって、腕を伸縮する機能。 | 所定の指示を基に、腕が伸縮される機能を制作することができた。 |
| 音声案内機能 | ロボット本体から音声を発し、横断者を案内する機能。 | スピーカーから録音済みの案内音声を発することができた。一方、音質が悪く、音の調整が難しいなど、改良の余地はあると考えられる。 |
| LINE操作機能 | ロボットの基礎的な操作をLINEのボタンを押すことによって行う機能。 | LINEで基礎的な操作を行うことができるようになったと考えられる。 一方、LINEで操作するための前提条件が存在してしまっているため、LINEで完結できるように改良の余地が必要である。 また、LINEを使用すると一定のラグが存在してしまっているため、改善が必要である。 |
| 緊急停止機能 | 非常停止ボタンをお押下することによって、ロボットの動作がすべて停止する機能。 | 即時性を有した非常停止機能を構成することができた。 一方、ロボットの性質上、緊急停止をした際に横断歩道上で呈する場面が想定されることで、その点については改良が必要。 |
| プロジェクト | 得票数 | 得票率 | 順位 | |
|---|---|---|---|---|
| MIRS2101 | MemoLip | 41 | 25.2 | 2 |
| MIRS2102 | FUTABA | 39 | 23.9 | 3 |
| MIRS2103 | ParCle | 42 | 25.8 | 1 |
| MIRS2104 | CiDer | 15 | 9.2 | 5 |
| MIRS2105 | PhotoKEN | 26 | 16.0 | 4 |
| A コンセプト |
B 機能 |
C ユーザ |
D ニーズ |
E 実現度 |
合計 | 順位 | |
|---|---|---|---|---|---|---|---|
| MIRS 2101 |
72.5% | 92.5% | 80.0% | 72.5% | 90.0% | 81.5& | 1位 |
| MIRS 2102 |
87.5% | 77.5% | 77.5% | 80.0% | 80.0% | 80.5& | 2位 |
| MIRS 2103 |
77.5% | 92.5% | 70.0% | 75.0% | 82.5% | 79.5& | 3位 |
| MIRS 2104 |
75.0% | 67.5% | 85.0% | 72.5% | 77.5% | 75.5& | 5位 |
| MIRS 2105 |
80.0% | 72.5% | 72.5% | 72.5% | 82.5% | 76.0& | 4位 |
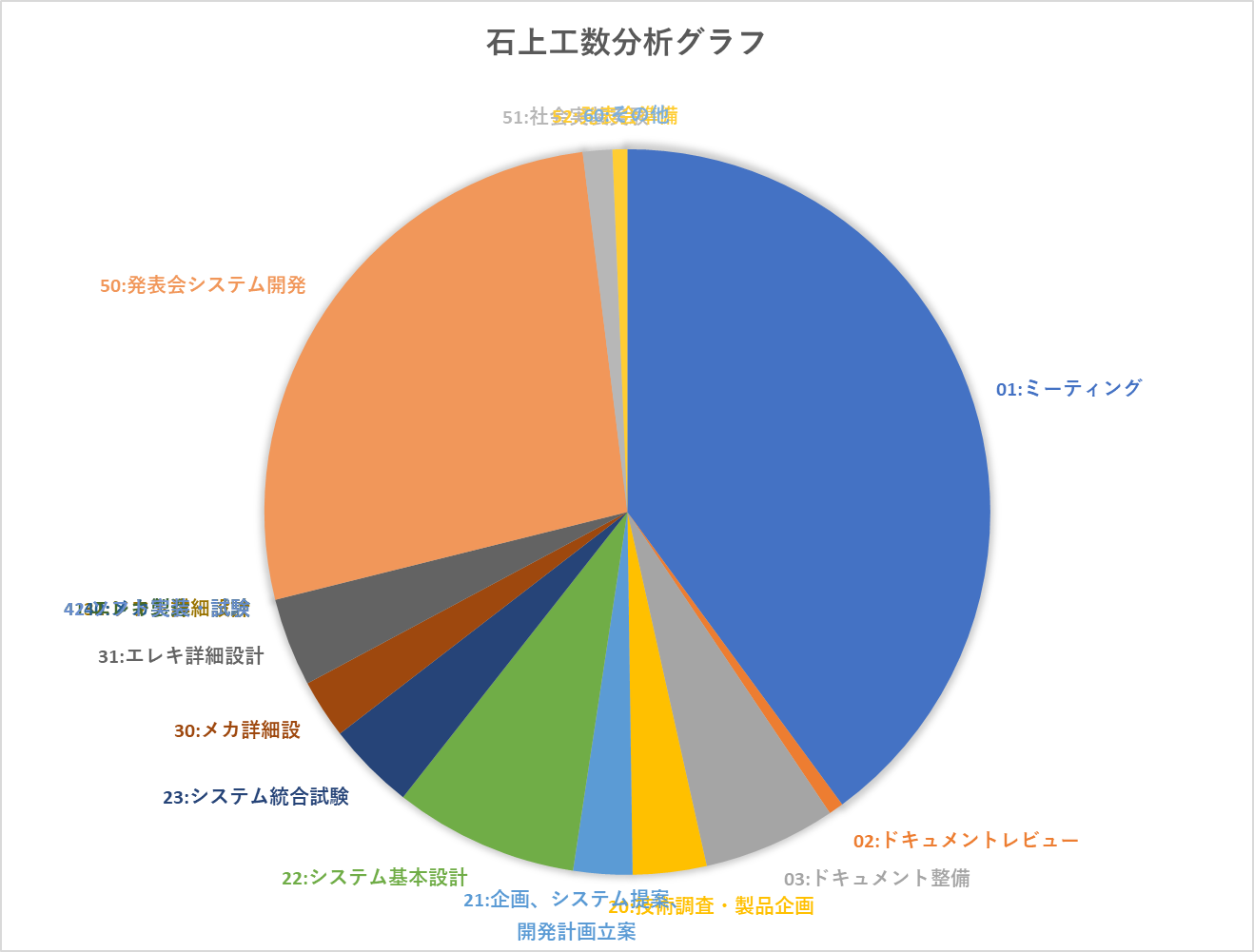
Fig.2 石上工数分析(152.3Hours)

Fig.3 浅野工数分析(224.2Hours)
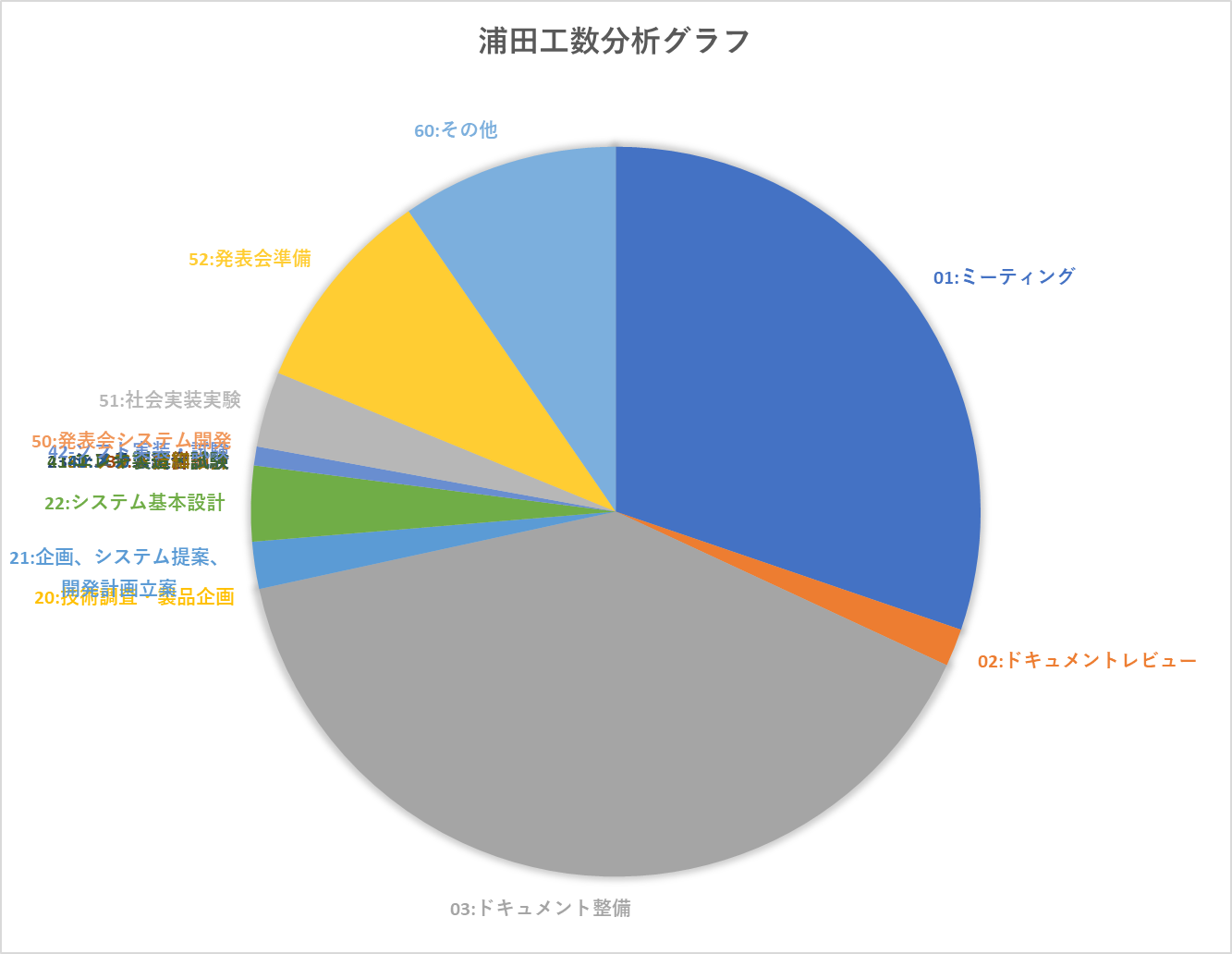
Fig.4浦田工数分析(119.7Hours)
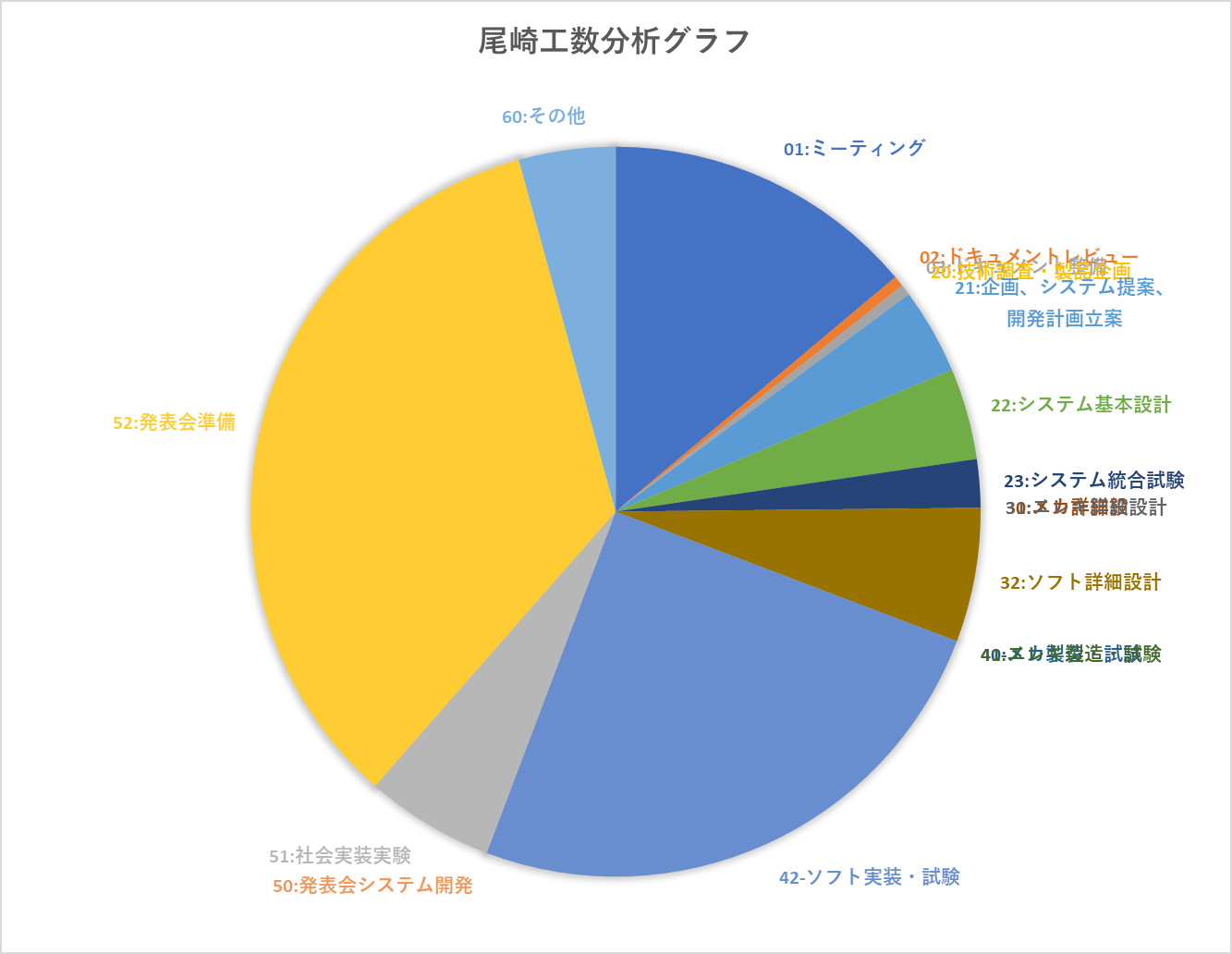
Fig.5 尾崎工数分析(210.2Hours)
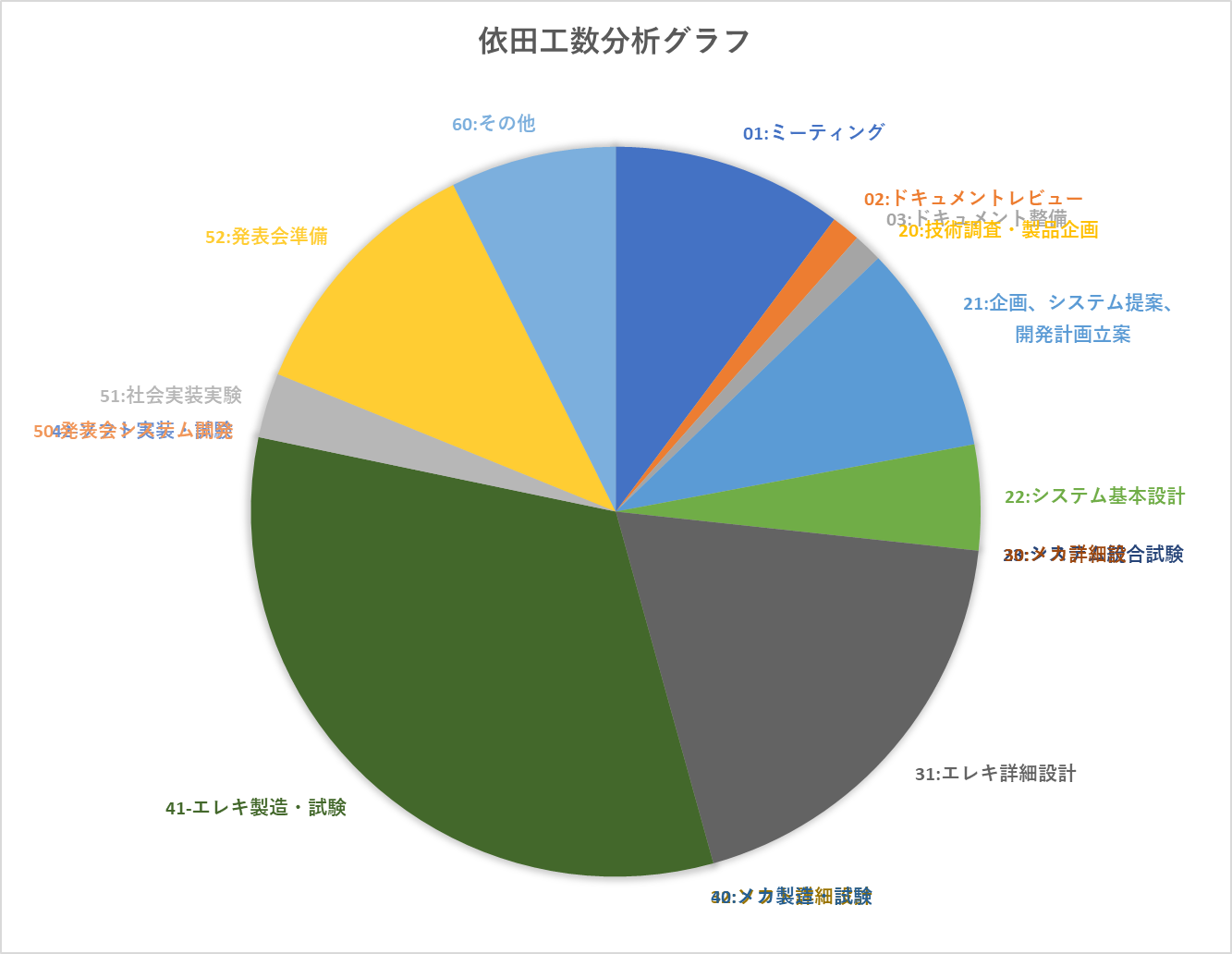
Fig.6 依田工数分析(156.5Hours)
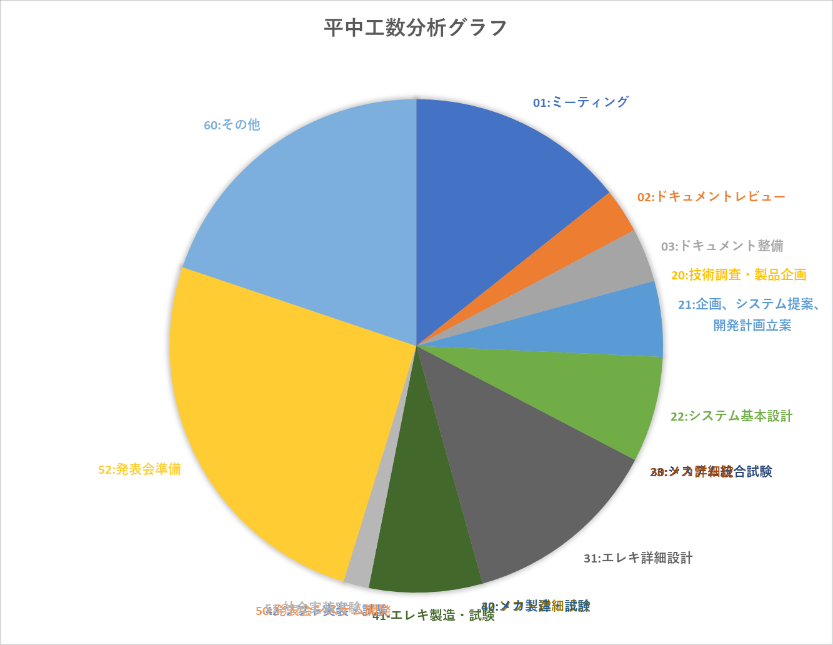
Fig.7 平中工数分析(161.4Hours)
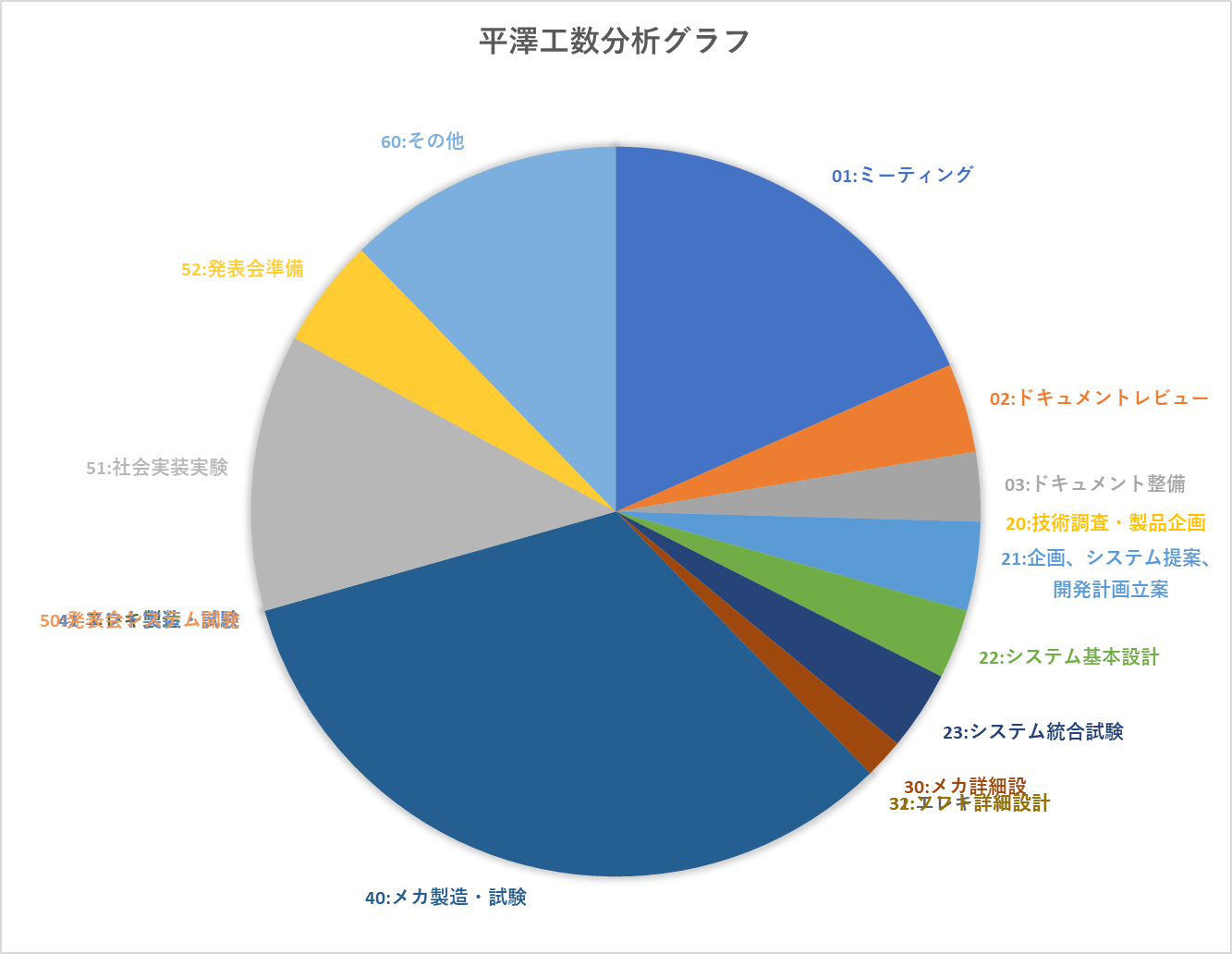
Fig.8 平澤工数分析(114Hours)
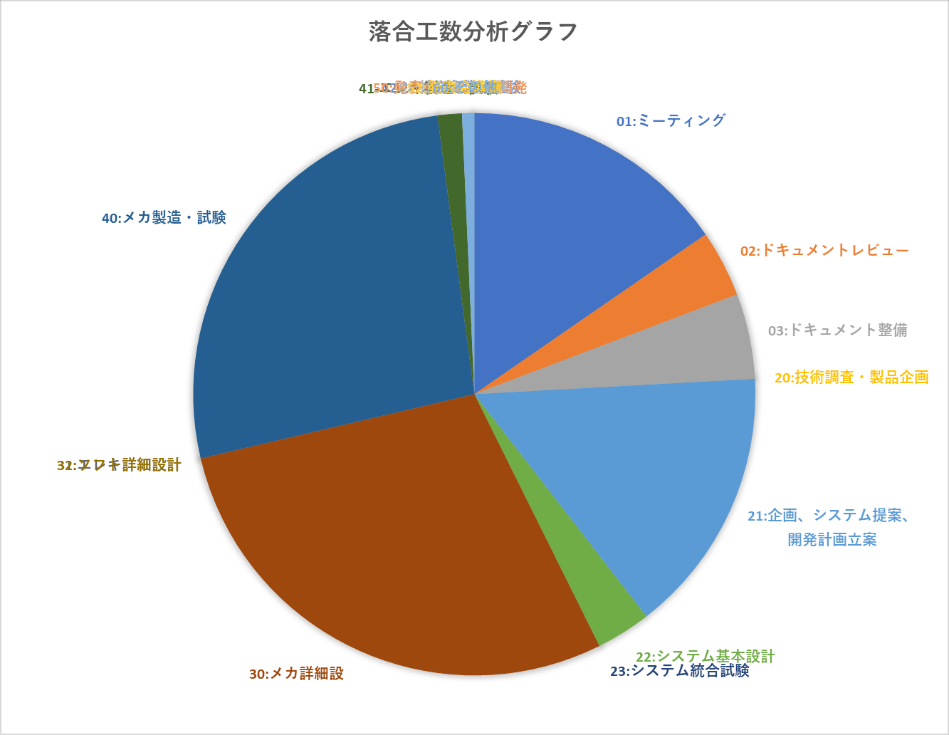
Fig.9 落合工数分析(143Hours)
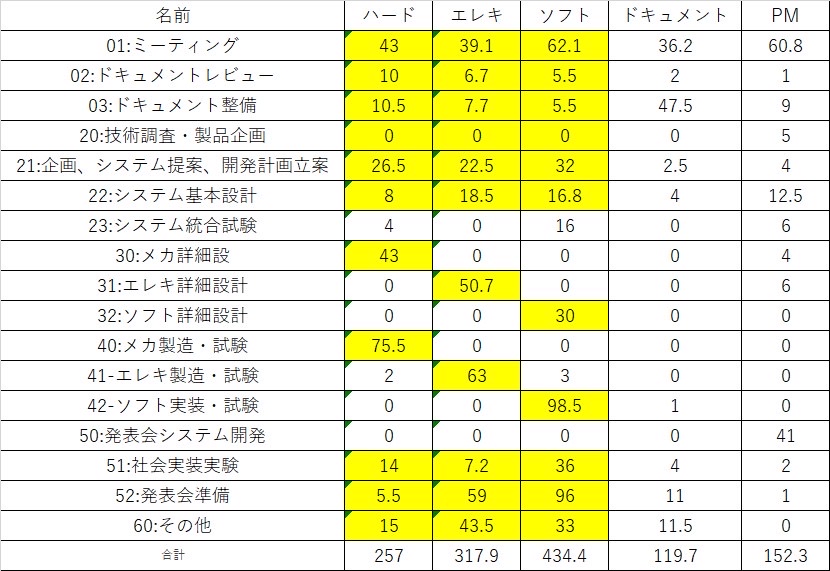
Fig.10 パート別工数構成比