
fig.1 ブロック線図
tab.1 ボード機能概要
| ボード | 目的 |
|---|---|
| Arduino UNO | 駆動系、コンベアモータの制御のため |
| Raspberry Pi | 機体全体制御のため |
| 電源ボード | 駆動系、コンベアモータへの電力供給、緊急停止のため |
| 名称 | MIRS2004 エレクトロニクス詳細設計書 |
|---|---|
| 番号 | MIRS2004-ELEC-0002 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2020.11.14 | 岩城海也 | 大沼先生 | 初版 |
本ドキュメントはMIRS2004の詳細設計書、エレクトロニクスについてのドキュメントである。
全体のブロック線図をfig.1に、機能概要をtab.1に示す。
fig.1 ブロック線図
tab.1 ボード機能概要
| ボード | 目的 |
|---|---|
| Arduino UNO | 駆動系、コンベアモータの制御のため |
| Raspberry Pi | 機体全体制御のため |
| 電源ボード | 駆動系、コンベアモータへの電力供給、緊急停止のため |
Arduinoのピン配置をtab.2に、配線図をfig.2に示す。
また、RaspberryPiのピン配置をtab.3に、配線図をfig.3に示す。
tab.2 Arduinoピン配置
| ピン番号 | 接続デバイス | IN/OUT |
|---|---|---|
| 2 | 左エンコーダA相 | IN |
| 3 | 右エンコーダA相 | IN |
| 4 | 左エンコーダB相 | IN |
| 5 | コンベアモータPWM | OUT |
| 6 | コンベアモータDIR | OUT |
| 7 | 右エンコーダB相 | IN |
| 8 | 右モータDIR | OUT |
| 9 | 右モータPWM | OUT |
| 11 | 左モータPWM | OUT |
| 12 | 左モータDIR | OUT |
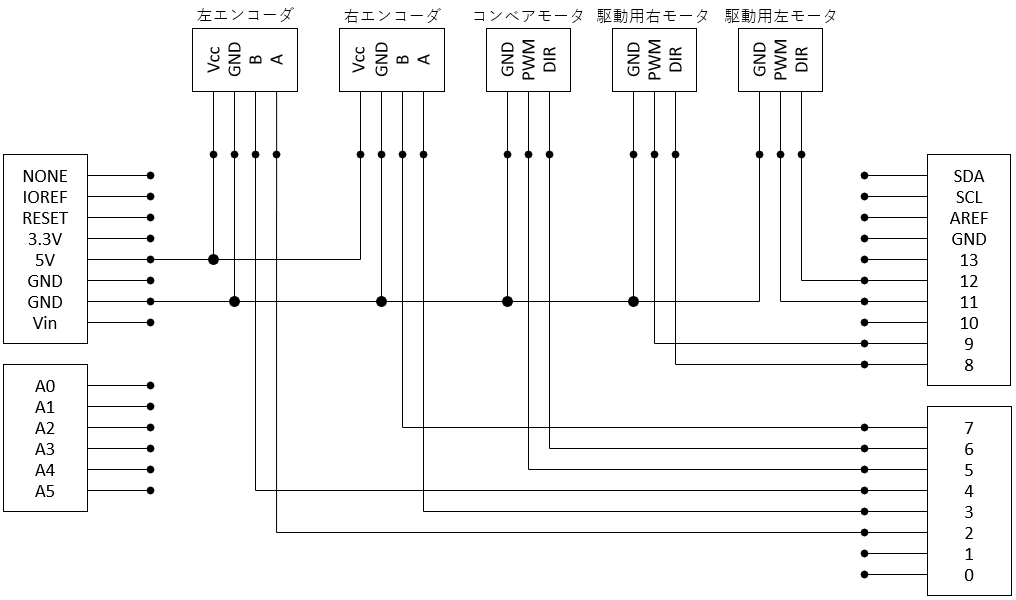
fig.1 Arduino配線図
tab.3 RaspberryPiピン配置
| ピン番号 | 接続デバイス |
|---|---|
| 1 | I2C-VccA |
| 2 | I2C-VccB |
| 3 | I2C-SDA |
| 5 | I2C-SCL |
| 6 | I2C-GND |
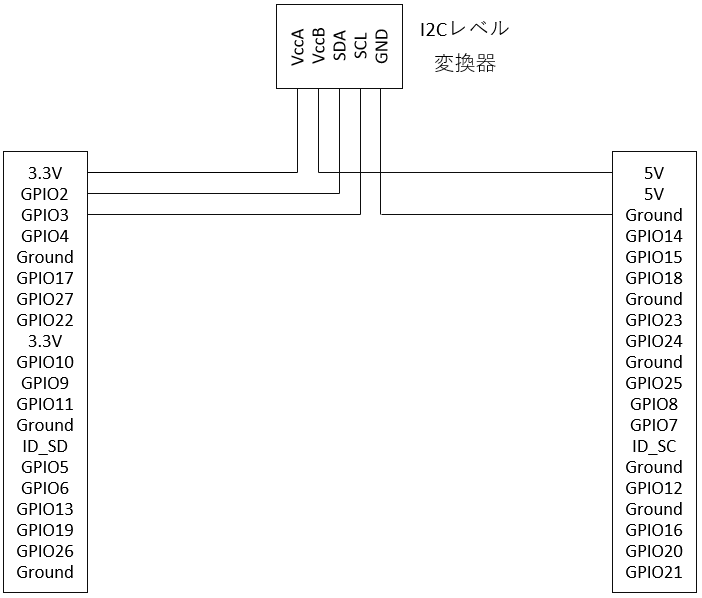
fig.2 RaspberryPi配線図
電源ボードの回路図をfig.3に示す。
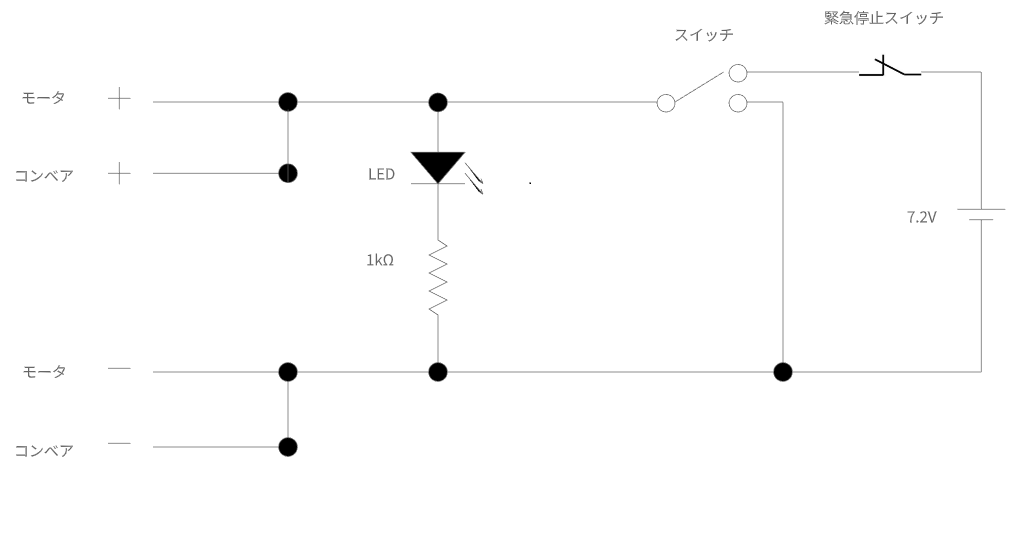
fig.3 電源ボードの回路図