.jpg)
| モジュール名 | 関数名 | 引数 | 戻り値 | 機能 | 言語 |
|---|---|---|---|---|---|
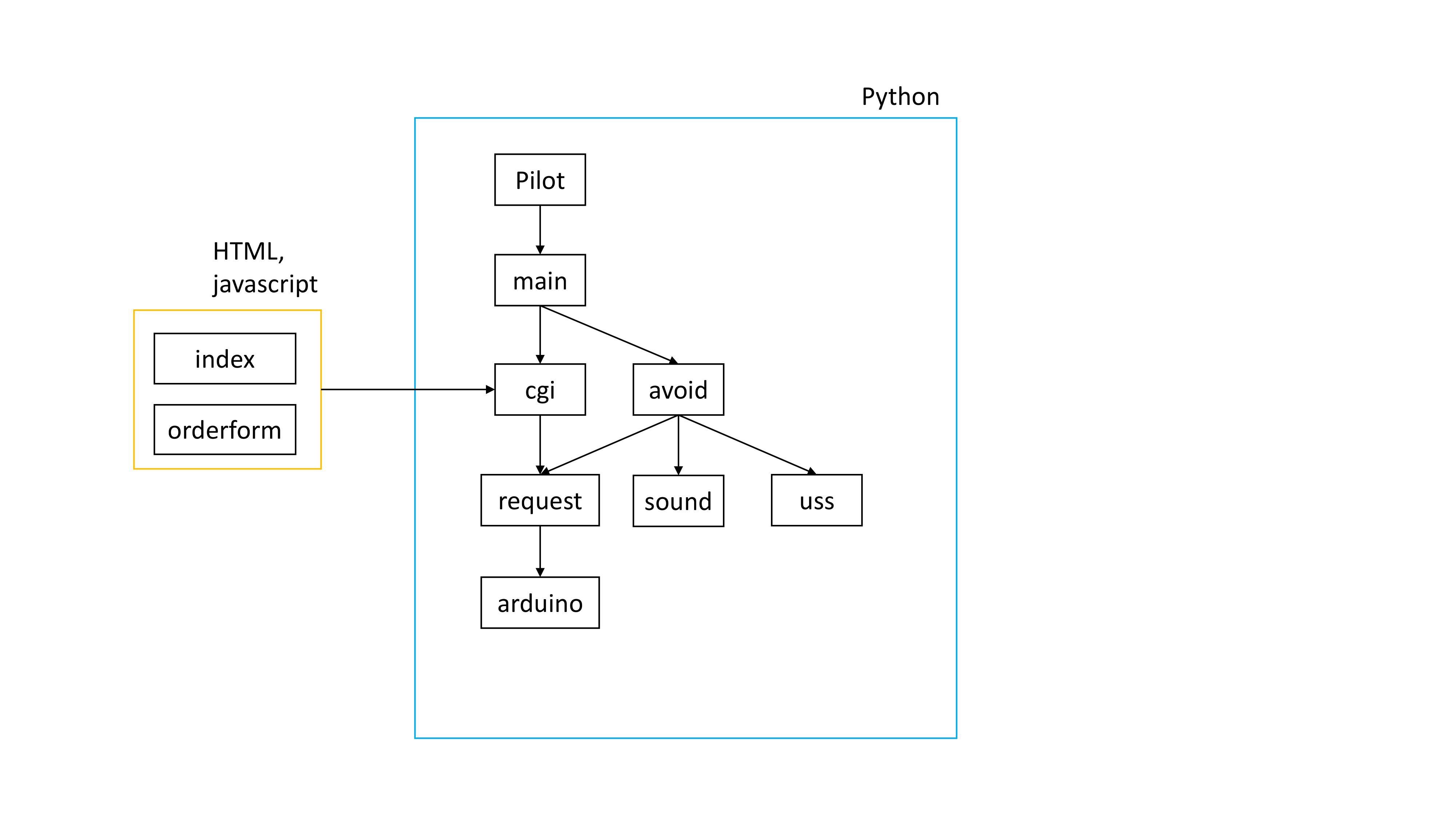
| index.html | display | なし | なし | 注文フォーム用WEBページの表示 | HTML |
| Orderform.js | disp countup SelectedValueAndText |
なし なし オブジェクト |
なし |
現在の注文内容を表示 注文番号のカウントアップ ラジオボックスの選択した値を読み取る |
javascript |
| CGI | script.py | フォームデータ | なし | フォームデータの受け取りと処理 | Python |
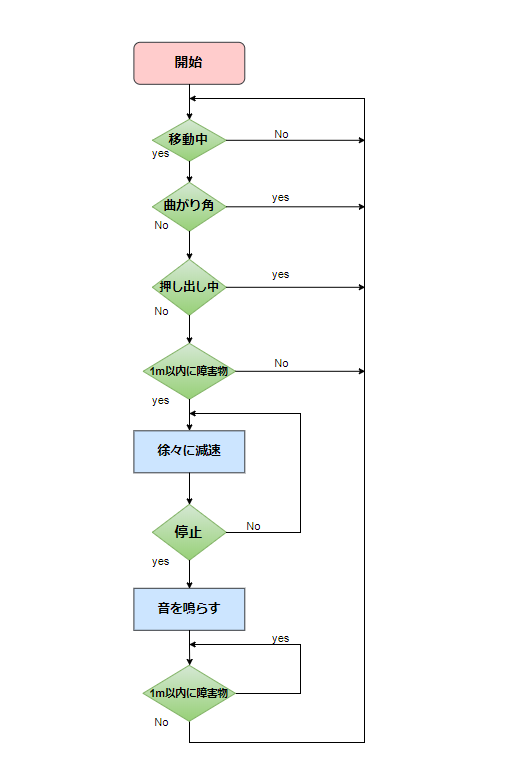
| avoid.py | init detection |
なし なし |
なし なし |
超音波のオープン、初期化 障害物の検知→走行の停止、音の再生 |
Python |
| request.py | motor | モータへの指令値 | なし | arduinoに指令を送る | python |
| music.py | sound | 1(鳴らす) or 0 | なし | 録音した音を流す | Python |
| uss.py | uss_open_l
uss_open_r uss_get_l uss_get_r |
なし | 0(成功) or それ以外(失敗)
0(成功) or それ以外(失敗) 測定値[cm] (不正な値を得た場合-1) 測定値[cm] (不正な値を得た場合-1) |
左の超音波センサのオープン
右の超音波センサのオープン 左の超音波センサの測定値取得 右の超音波センサの測定値取得 |
Python |
| arduino.py | serial_write |
文字列 | なし |
引数で受け取った文字列を、Arduinoへシリアル通信で送信 | Python |
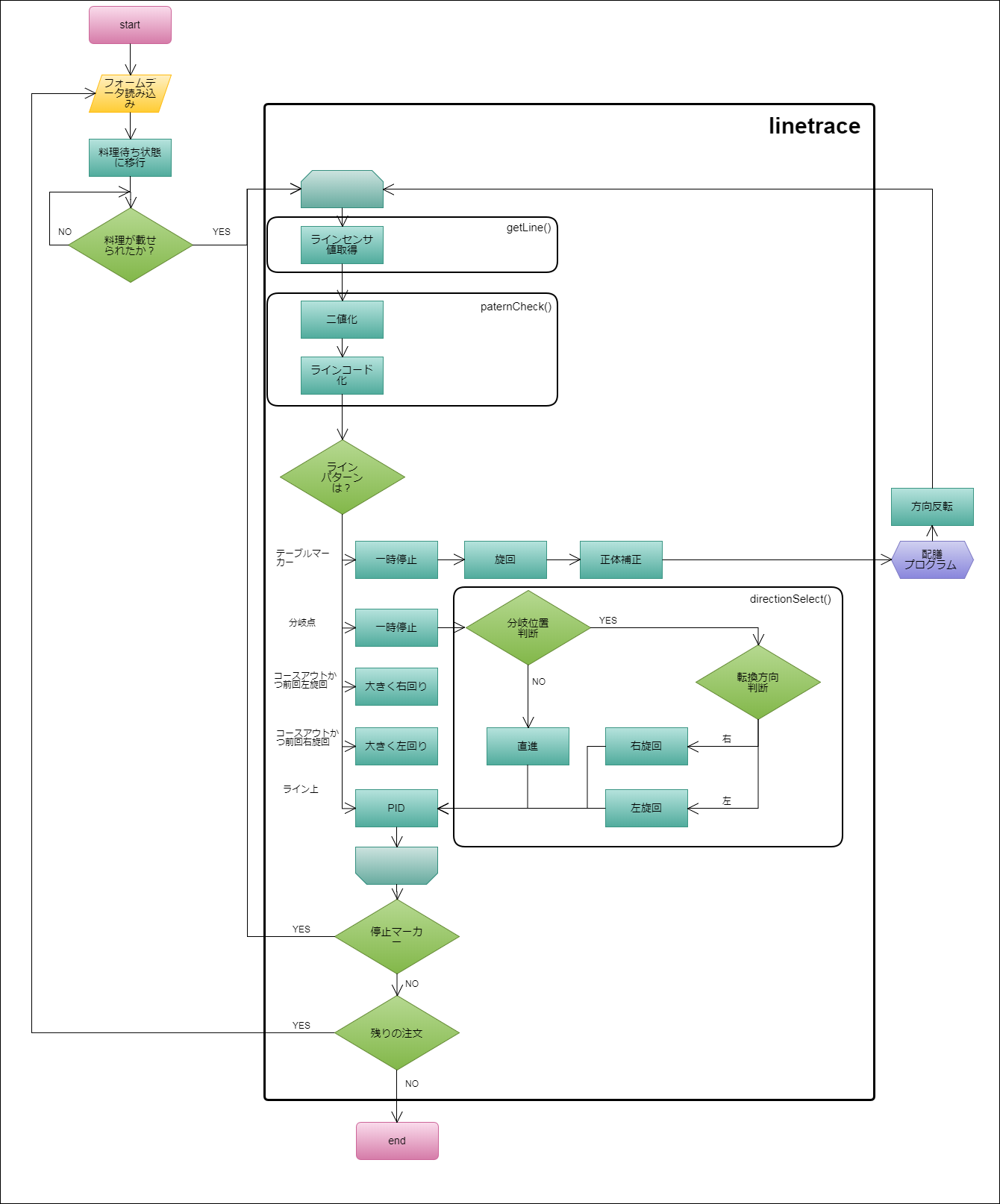
| linetrace.ino | linetrace()
getLine() doublecheck() |
なし | なし | PID制御によるライントレース
ラインセンサの値の取得 ライン境界面での2重チェック |
Arduino |
| raspi.ino | serial_pi raspi_read |
なし シリアル通信で受け取った文字列 |
なし なし |
RaspberryPiとのシリアル通信 受け取った文字列を動作に変換 |
Arduino |
| put.ino | put() | なし | なし | 押し出し機構の制御 | Arduino |
| モジュール名 | 試験内容 |
|---|---|
| linetrace.ino | センサ値を正しく取得できるか確認
パターンに応じた値が出力できるか確認 センサ値により望んだ方向に旋回できるか確認 |
| uss.py | 左右の超音波センサがオープンできるか確認
正しく超音波センサ値を取得できるか確認 |
| sound.py | 音を再生できるか確認 |
| arduino.py | arduinoと通信できるか確認 |
| put | 押し出しできるか確認 タッチセンサの反応確認 |
| 動作ブロック名 | 試験内容 |
|---|---|
| 注文ブロック | 指定した注文を送信できるかいる確認 |
| 障害物回避 | 前方に障害物があるとき停止できるか確認。
停止後、音声による警告を行うか確認。 障害物がなくなると走行を再開するか確認。 |
| ライントレースブロック | 線を辿れるか確認 停止線で停止できるか確認 |
| 配膳ブロック | マーカーを検知し、適切な位置に停止できるか確認
押し出し動作を行い、ものが適切に押し出せるか確認 押し出し動作の後、ラインに復帰できるか確認 |
| 名称 | MIRS1703ソフトウェア詳細設計書 |
|---|---|
| 番号 | MIRS1703-DSGN-0002b
|
最終更新日:2018.2.7
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| B01 | 2017.12.22 | 片岡駿介、峯慎平 | 初版 |