ドキュメント内目次
1.はじめに
本ドキュメントはMIRS1703班のシステム提案書である。
方向性が定まったためここで報告する。
2.プロジェクトの方針
プロジェクト名
店員 ~season 2~ プロジェクト
キャッチコピー:お前、バイトクビだってよ
これが21世紀型店員
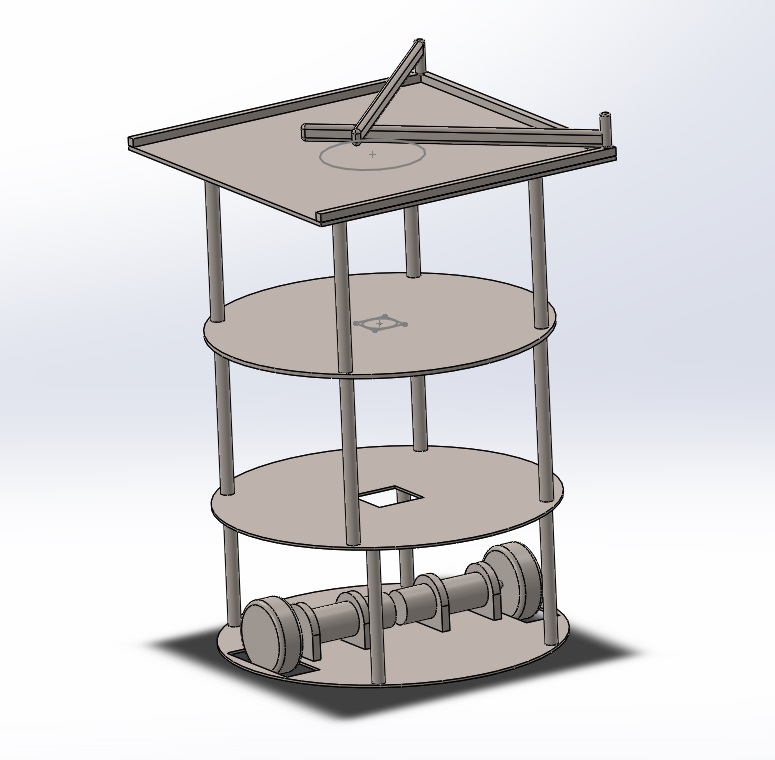
外観図 MODEL:ARC(Automated Robot Carrying)
開発の背景
アルバイトをしているとシフトが足りていない日に直面することがある。また自分が客の立場で飲食店で食事をする際、
店員を呼んでもなかなかこなかったり、料理がくるのが遅すぎてお腹をすかせイライラとした経験がある人は
少なくないであろう。そんな飲食店の店員のなにか助けになるロボットはできないだろうかを考え本プロジェクトを始動した。
開発の目的
商品の配膳をロボットが行うことにより人手不足を解消出来るようにするとともに、人には人にしか出来ない
おもてなしの心を持った接客に専念してもらえる環境を作る。
目標・成果
店員がキッチンに専念できフロアでの配膳作業を一任できるようにすることである。
ここでの配膳とは、お客様の正面、机の上まで運ぶことである。
ターゲット
人手の足りないフロアに段差がなくテーブル席のみの飲食店。
3.機能の要件
「お客様の目の前まで配膳いたします。お席についてお待ちください。」
机の近くまで料理を運ぶだけでなく、人が配膳するのと同じようにお客様の目の前まで、机の上に配膳します。
荷台の上に押し出し機構を取り付けることにより、実現します。
全自動!料理を荷台に乗せたらあなたのお仕事は終わりです。
料理を乗せて行先を指定すると以降はロボットがひとりでに配膳し再びキッチンまで戻ってきます。
配膳の工程をすべて自動化することでホールの従業員の人数が少数でまかなえます。
おっと危ない!!なんてことは起こしません。人が近づくと一時停止します。
ロボットが店内を走り回っているとなると心配なのが人や物との接触事故。お客様にケガをさせてしまうおそれがある
だけでなく、料理をこぼしてしまう恐れもあるなど配膳中に接触事故は起こしてはいけません。安全に配膳できるよう
センサに物体が近づくと一時停止し音声にてロボットが近づいていること知らせます。
ライントレースを使用して最短で確実にお届けいたします。
たくさんの机がある店内でお客様の手元に確実に料理を運びかつ最短のルートで配膳するためにライントレースを活用します。
テーブルごとに場所を記憶させたプログラムでライン上を走行します。
4.試作機製作
初めから完成形を目指して製作するのは効率的でないと考えたので以下の機能のみに絞った
試作機を製作する。
- 無線でデータを送りそのデータを元にラインとレースで指定の場所まで走行する。
- 机と同じ高さにある天板を実装する。
5.動作シナリオ
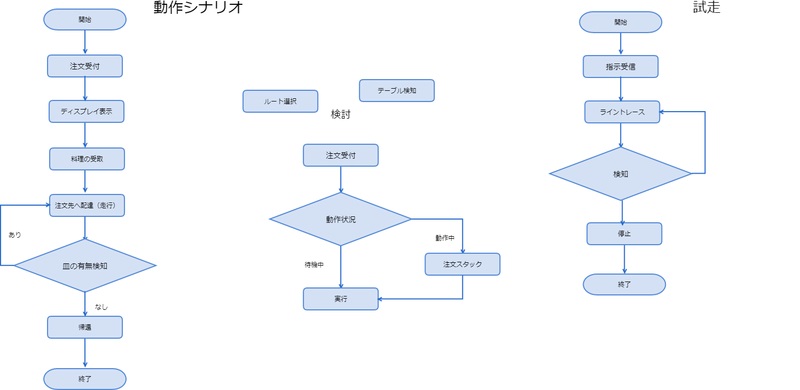
想定される動作のシナリオを以下に示す。
右端の試走中にある検知とは停止すべき机の検知であり人や障害物のことではない。
6.購入予定物品
現状分かっている必要購入物品を以下にあげる。
昨年の部品で使えるものがあればなるべく活用していく。
| 品名 |
品番 |
単価 [円] |
必要個数[個] |
販売元 |
使用用途 |
超音波センサ
|
HC-SR04 |
400 |
6 |
秋月電子通商 |
障害物検知機能 |
フォトリフレクション
|
LBR-127HLd |
50 |
2 |
秋月電子通商 |
ライントレース |
アルミ棒
|
A5052 30φ*1m |
3690 |
4 |
モノタロウ |
天板の高さをあげる支柱 |
スピーカー
|
F77G98-6 |
300 |
1 |
秋月電子通商 |
停止の際の音声通知機能 |
| モーター |
ST-42BYH1004-5013 |
1900 |
1 |
秋月電子通商 |
天板の押し出し機構 |
| モータードライブキット |
AE-L6470DRV |
1800 |
1 |
秋月電子通商 |
天板の押し出し機構 |
合計21,260円
7.標準機との変更点
標準機との変更点を以下にあげる
- 機体の高さを0.7mに変更
- 超音波センサを6つ追加して八方位に対応させる
- フォトリフレクションをシャーシに2つ搭載
- ホイル、天板の素材を耐久性の高いものへ変更
- 天板に押し出し機構を搭載
- スピーカーの搭載
8.検討事項
このプロジェクトを進めていく上で現在わかっている今後の検討事項は以下の2つである。
- 天板上の押し出し機能の実装方法
- 重さや高さに耐えられる耐久性を満たしたシャーシやホイルの素材
- 外部端末との連携機能実装について
MIRS1703 管理台帳へ戻る