本ドキュメントについて
本ドキュメントは、以下の4項目について記し、8月8日に行われる1日体験入学でのプレ競技会で、優勝するための計画書である。
- チーム目標
- 基本戦略
- プログラム概要
- 開発日程
チーム目標
MIRS1504 目標
~優勝~
早くゴールすることを目標とする。
~優勝~
早くゴールすることを目標とする。
理由:MIRS2015プレ競技会 ルールの試合形式に学業点として、「順位に応じてチームメンバーの学業点に加味される。 」とあるため。
チーム目標を達成するためのシステム開発計画は、第5項の開発日程どおりである。
基本戦略
MIRS1504はスピードを重視して優勝を目指すので、基本戦略は以下の4項目である。
•すべての直進走行を50[cm/sec]で行う。
•最初の直進が終了する直前に2つの超音波センサで距離を計測し、その計測値に5[cm]以上の差があれば、正体補正をする。
•曲がるときに機体を止めない。
•スタートしてから14秒以内でゴールする。
プログラム概要
MIRS2015プレ競技会 ルールを参照し、プレ競技会用のプログラムを作成する。
競技内容はタイムアタックで、試合形式はトーナメント形式である。今回のタイムアタックの企画立案者は今年度のプロジェクトリーダーの4名である。
Fig.1に走行する競技フィールドの全体図を示す。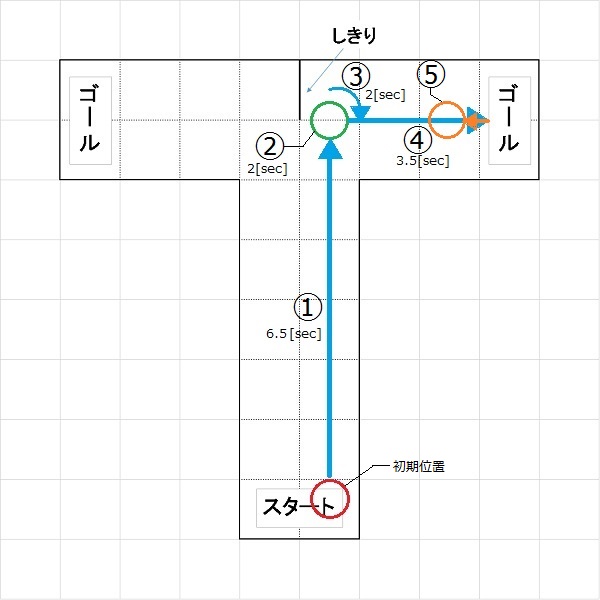
Fig.1 競技フィールド
一マス500mm×500mmとし、競技フィールド全体の広さは4000mm×4000mmで、道幅は1000mmである。
超音波の干渉を防ぐためにしきりが設けられている。
このようなフィールドとルールで競うためのプログラムを、Fig.2のプレ競技会用フローチャートに基づき、今後作成する。
フローチャートのメインの流れは以下の①から⑤に示す。
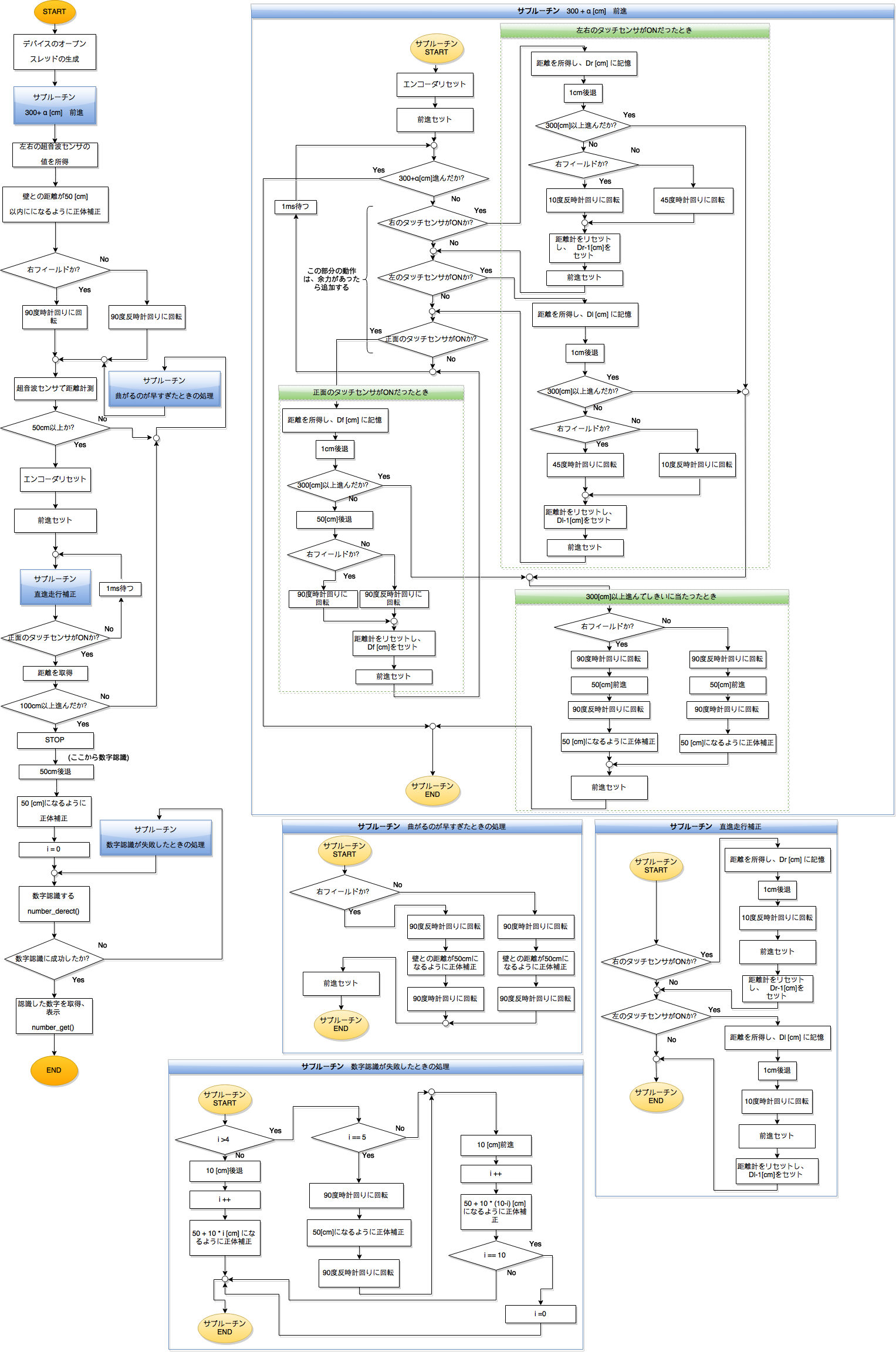
Fig.2 プレ競技会用フローチャート
競技内容はタイムアタックで、試合形式はトーナメント形式である。今回のタイムアタックの企画立案者は今年度のプロジェクトリーダーの4名である。
Fig.1に走行する競技フィールドの全体図を示す。
Fig.1 競技フィールド
一マス500mm×500mmとし、競技フィールド全体の広さは4000mm×4000mmで、道幅は1000mmである。
超音波の干渉を防ぐためにしきりが設けられている。
このようなフィールドとルールで競うためのプログラムを、Fig.2のプレ競技会用フローチャートに基づき、今後作成する。
フローチャートのメインの流れは以下の①から⑤に示す。
①初期位置(Fig.1の赤丸に示す)から、ロータリエンコーダで移動距離を計測しつつ、50[cm/sec]のスピードで機体の方向転換をする地点まで直進する。(右フィールドか左フィールドかはマクロで与える。)(6.5[sec])
②左右の超音波センサの値の差が5[cm]以上、または目標距離と実測値が離れているほうの超音波センサの値と目標距離の差が5[cm]以上であった場合のみ正体補正する。
壁とMIRSの距離とは、壁とMIRSの中心との距離という意味である。(MIRSの中心と超音波センサとの距離はマクロで与える。)(2[sec])
③ロータリエンコーダを用いて、機体をゴール方向へ90度回転させる。(2[sec])
④機体のタッチセンサで、ゴールのタッチセンサを押したことを認識するまで、直進する。(3.5[sec])
⑤超音波センサで数字ボードとの距離を計測しながら正体補正し、ロータリエンコーダを用い後退しながら、webカメラで数字認識をする。(ここまで14[sec]で、制限時間90秒なので⑤は76秒以内)
②左右の超音波センサの値の差が5[cm]以上、または目標距離と実測値が離れているほうの超音波センサの値と目標距離の差が5[cm]以上であった場合のみ正体補正する。
壁とMIRSの距離とは、壁とMIRSの中心との距離という意味である。(MIRSの中心と超音波センサとの距離はマクロで与える。)(2[sec])
③ロータリエンコーダを用いて、機体をゴール方向へ90度回転させる。(2[sec])
④機体のタッチセンサで、ゴールのタッチセンサを押したことを認識するまで、直進する。(3.5[sec])
⑤超音波センサで数字ボードとの距離を計測しながら正体補正し、ロータリエンコーダを用い後退しながら、webカメラで数字認識をする。(ここまで14[sec]で、制限時間90秒なので⑤は76秒以内)
Fig.2 プレ競技会用フローチャート
開発日程
Fig.3にMIRS1504の開発日程ガントチャートを示す。
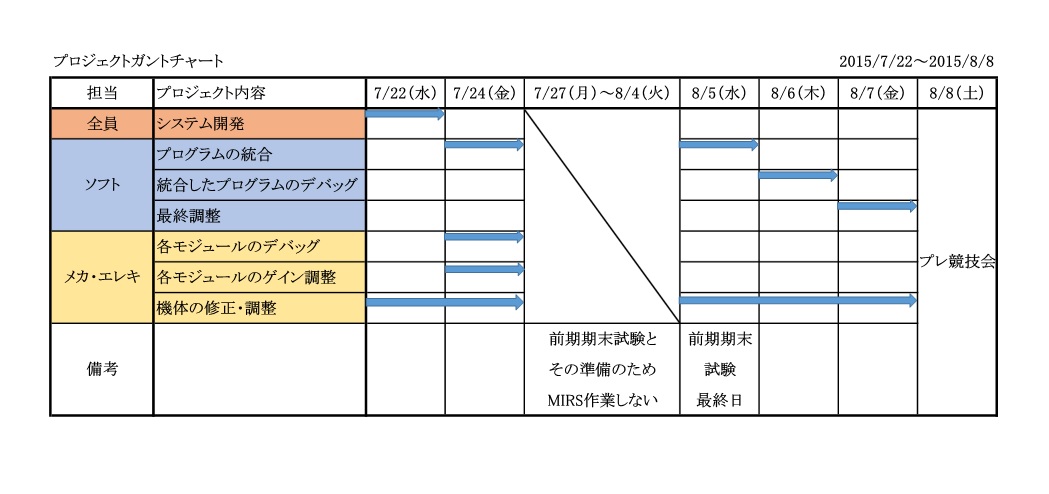
Fig.3 開発日程ガントチャート
7月20日(月)から成績不振者は19:00以降のMIRS作業を禁止されている。