はじめに
本ドキュメントは、MIRS1504のオリジナル機体についての基本設計及び、開発スケジュールを記録に残すことを目的とする。
動作シナリオ
MIRS1504機体の動作シナリオを、フローチャートとして以下に示す。

Fig.1 動作シナリオ |

Fig.2 現場急行 |

Fig.3 捕獲 |
機能・性能
機能の性能、及び実現方法を以下に示す。
競技レベル
Table1 競技レベル 機能 概要 時間[s] 現場急行 直進、左折、直進する。 10 数字認識 DBに表示されている数字をカメラを用いて認識する。 6 巡回 怪盗機を発見するまで、展示室を巡回する。 12 怪盗機確保 怪盗機めがけて突進する。 2 30 基本機能
Table2 基本機能 機能 内容 実現方法 直進走行 超音波センサやタッチセンサの情報を元に、常に直進走行を行えるように補正する。 超音波センサを2つに増やす。設置場所は機体概形を参照。 正体補正 2機のセンサの値のずれをがなくなるようにして正体補正を行う。 前方部と右側に超音波センサを2機ずつ設置し、直進中は右側の2機、数字認識するときは前方部の2機を使用する。
超音波センサを市販のものに変更する。
設置場所は機体概形を参照。機体の回転 右左折や進行方向決定の際に、必要量の回転を行う。 ロータリーエンコーダを用いる。 数字認識 正体補正を行い、機体正面に設置するWEBカメラにより画像を撮る。 正体補正を確実に行い、数字認識可能な位置への移動を行う。 画像による怪盗の認識 画像中の赤色の割合から、怪盗機のおおよその位置を割り出す。 正面と左側に設置した2つのWEBカメラを用いて行う。
設置場所は機体概形を参照。赤外線センサによる怪盗の認識 WEBカメラで怪盗を認識後は、赤外線センサによる怪盗の追跡を行う。 機体に赤外線センサを8つ設置し、追跡を行う。
設置場所は機体概形を参照。サーバへの通信 数字認識において、画像から得られた数字データをサーバへ送信する。 数字のデータをsshで送る。 拡張機能
Table3 競技終了を認知させるための拡張機能 機能 実現方法 担当者 怪盗機確保の認識 WEBカメラの赤色の割合が条件に達しているときにタッチセンサが押された状態を怪盗確保として プログラムを作成する。 川崎 Table4 観客に魅せるための拡張機能 機能 実現方法 担当者 外見に親しみを持ってもらう バンパにデコレーションを施す。 鍵山・望月 エレクトリカルパレード 複数のLEDで派手な演出を行う。 佐野・三室 Table5 便利性向上のための拡張機能 機能 実現方法 担当者 メンテナンスのしやすさ 標準機に使用しているねじがいくつか長さがあっていないので丁度いい長さに変えて外見をよくする。 鍵山・望月 システム開発項目
システム開発項目を以下に示す。
また、具体的に変更する点をシステム構成に示す。Table6 システム開発項目 システム項目 内容 タイヤの変更 アルミホイールに変えてテニスグリップを巻く。 赤外線受信ボードの製作 怪盗機から発せられる赤外線を受信するボードを8つ製作する。 現場急行用プログラムの作成 展示室内へ向かうプログラムを作成する。 展示室内進入用プログラムの作成 超音波センサを使用して機体を旋回し、展示室内に進入するプログラムを作成する。 展示室内移動用プログラムの作成 直進走行、回転を繰り返し行うプログラムを作成する。 怪盗確保確認用プログラムの作成 webカメラとタッチセンサからの情報を使用したプログラムを作成する。 色識別プログラムの作成 怪盗機の赤色を認識するプログラムを作成する。 移動方向判断プログラムの作成 画像から怪盗機の位置を認識するプログラムを作成する。 赤外線受信プログラムの作成 怪盗機から発せられる赤外線を受信するためのプログラムを作成する。 機体全体にデコレーションを施す MIRSを観客の目を引く見た目にする。 システム構成
メカ二クス構成
担当者 : 鍵山・望月
構成概要
Table7 メカニクス構成概要 開発概要 目的・理由 担当者 シャーシに追加で穴を開ける。 各種センサを追加で搭載するため。 望月 バッテリー置き場を製作する。 バッテリーの置き場を確保するため。 望月 USBハブの固定台を製作する。 USB端子をまとめるため。 鍵山 シャーシの後方にバンパとタッチセンサを3つ追加する。 後部にタッチセンサを追加することで後ろの壁を検知するため。 鍵山 標準のタイヤをアルミホイールに変える。 タイヤが歪んでロータリーエンコーダの値がずれるのを防ぐため。 望月・鍵山 機体概形
機体概形を図として以下に示す。
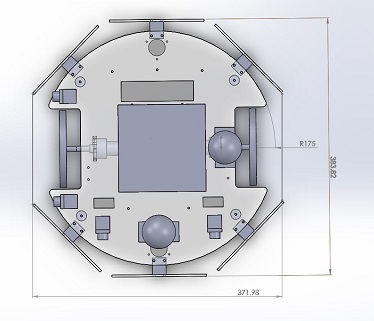
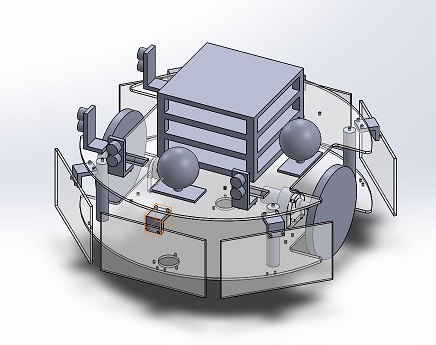
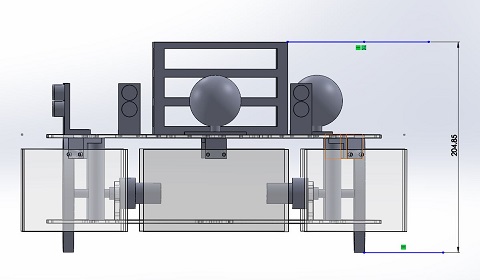
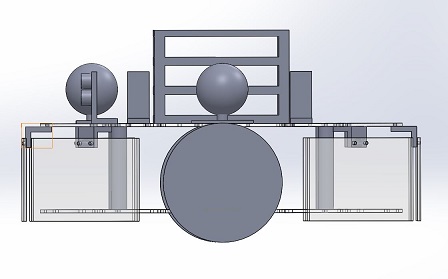
Fig.4 機体概形 主要部品表
Table8 主要部品表 要素 概要 個数 シャーシ 標準機のものに新規に穴を開けて使用。 2 支柱 標準機のものを使用。 4 タイヤ アルミ製。昨年度MIRS1403からの引継ぎ物品を使用。直径115mm 2 バンパ 標準部品を使用する。新規に3つ製作する。 6 バッテリーボード バッテリーボード詳細設計書を元に新規に製作。 1 USB固定具 USB固定金具詳細設計書を元に新規に製作。 1 モーター 標準機のものを使用。 2 ロータリエンコーダ 標準機のものを使用。 2
エレクトロ二クス構成
担当者 : 大石・水溜・佐野・三室・勝又
構成概要
Table9 エレクトロニクス構成概要 開発概要 目的・理由 担当者 超音波センサーをMIRS1403から引き継いだもの×4(パララックス社#28015)に変更する。 動作が安定化し、壁との距離が3cm~335cmまで測定可能になるので現在の超音波センサよりも性能が良いため。 勝又・佐野 タッチセンサを後部に3つ追加する。 プレ競技会では前方のみしか必要なかったが今回は後ろの壁も検知できるようにするため。 勝又・佐野 カメラを正面のほかに左側に追加で設置する。 怪盗発見後、迅速に追跡動作に入るため。 勝又・佐野 赤外線受信ボードを製作する。 怪盗機から発せられる赤外線を受信して怪盗機を発見するため。 大石・水溜 新規ケーブル製作 現在はケーブルの長さが適切でなく配線が絡まってしまうので適切な長さに調整するため。 三室 LEDを使用した外装を製作する。 観客に魅せるため。 佐野 構成図
構成図を以下に示す。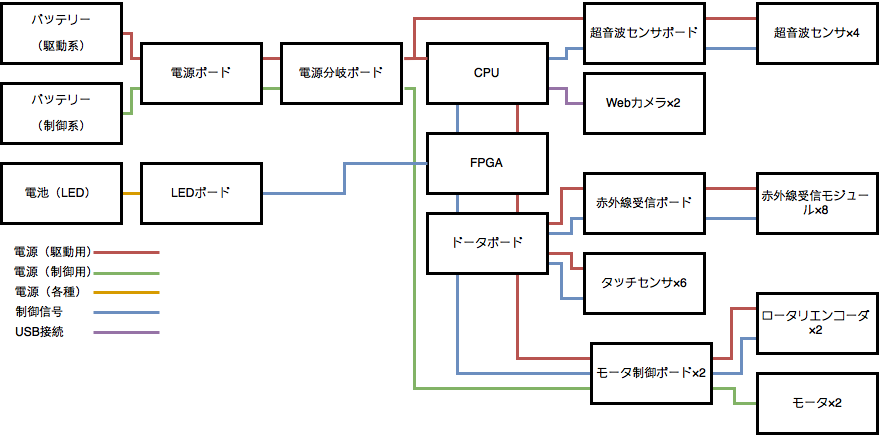 Fig.5 エレクトロニクス構成図
Fig.5 エレクトロニクス構成図
使用ボード・部品一覧
Table10 使用ボード・部品一覧 部品・ボード名 概要 個数 超音波センサ MIRS1403から引き継いだものを使用。 4 超音波センサボード MIRS1403から引き継いだものを使用。1つのボードで4つの超音波センサを管理する。 1 赤外線受信ボード 新規に製作。 8 モータ制御ボード 標準機のものを使用。 2 電源ボード 標準機のものを使用。 1 CPUボード 標準機のものを使用。 1 FPGAボード 標準機のものを使用。 1 ドータボード 標準機のものを使用。 1 LEDボード MIRS1403から引き継いだものを使用。 1 バッテリー 標準機のものを使用。 1
ソフトウェア構成
担当者 : 川崎・原・志村構成概要
Table11 変更点一覧 開発概要 目的・理由 担当者 怪盗機を見つけたときの関数を作る。 怪盗機を確保するため。 川崎 超音波センサの変更に対応する。 正体補正により走行の直進性を高めるため。 志村 赤外線センサ用のモジュールを作る。 怪盗機を見つけるため。 原 画像処理(色の識別)用のモジュールを作る。 怪盗機を見つけるため。 川崎 通信用のモジュールを作る。 認識した数字をサーバへ送信するため。 原 LED制御用のモジュールを作る。 現在のプログラムの状態を視覚的に知るため。観客を魅せるため。 志村 モジュール構成図

Fig.6 モジュール構成図モジュール一覧
上記のモジュールについて個別にテストプログラムを作成する。Table12 モジュール一覧 モジュール名 用途 概要 依存モジュール 担当 備考 パイロット(pilot) 司令塔の呼び出しとデバイスのオープン 司令塔とデバイスオープンモジュールを呼び出す デバイスオープン、司令塔 大きな変更はしない デバイスオープン(device) デバイスのオープン 各デバイスを使用する準備をする 各デバイスドライバ 大きな変更はしない 司令塔(mirsak_main) 各モジュールを統合し、全体の制御を行う 現場急行、巡回、怪盗発見後の追跡動作を行う 数字認識、画像認識、IO Read、赤外線計測、正体補正、走行管理、距離計、速度制御、LED制御、通信 川崎 既存のモュール(mirsak_patrol)を変更する 数字認識(number) 数字の認識 webカメラを使い数字を認識する なし 大きな変更はしない 画像認識(picture) 怪盗機の発見 webカメラを使い怪盗機を発見する なし 川崎 新規に作成する IO Read(io) タッチセンサの確認 タッチセンサのON,OFFを所得する なし 大きな変更はしない 赤外線計測(infrared) 赤外線センサの確認 各赤外線センサの値を所得する なし 原 新規に作成する 正体補正(direction) 正体補正の実行 正体補正をして、自機の直進性を保つ 超音波計測、走行管理 大きな変更はしない 超音波計測(uss) 超音波センサの確認 各超音波センサの値を所得する なし 志村 既存のモジュール(uss)を変更する 走行管理(run_ctrl) 走行の制御 直進および旋回を行う 速度制御、距離計 大きな変更はしない 速度制御(vel_ctrl) 走行速度の制御 走行速度を指定速度に制御する モータ、エンコーダ 大きな変更はしない 距離計(distance) 走行距離の計測 モータの走行距離を計測する エンコーダ 大きな変更はしない モータ(motor) モータの制御 モータにPWM値を送り、動かす なし 大きな変更はしない エンコーダ(encoder) エンコーダの値の所得 エンコーダの値を所得する なし 大きな変更はしない LED制御(led) LEDの制御 LEDを制御する なし 志村 新規に作成する 通信(server) サーバとの通信 サーバへデータを送信する。 なし 原 新規に作成する
購入物品
Table13 購入物品 品名 販売元 型番 価格 個数 赤外線受信モジュール 秋月電子通商 赤外線リモコン受信モジュールOSRB38C9AA 400円 4 ユニバーサル基板 秋月電子通商 片面ガラス・ユニバーサル基板 Cタイプ(72x47.5mm) めっき仕上げ 60円 8 PIC16F84A 秋月電子通商 PICマイコン PIC16F84A-20I/P 300円 1 プラスチックねじ 秋月電子通商 3mmプラネ(12mm) + ナットセット(20個入) 200円 1 アクリル板(透明) アクリルアイ アクリル板 (495×495) 980円 1 アクリル棒(透明) アクリルアイ アクリル棒 (φ15、長さ1m) 822円 1 スペーサー マルツオンライン ジュラコンスペーサー C-315 (M3用、15mm) 25円 4 グリップ ヨネックス(YONEX) ウェットスーパーエクセルグリップ(黒) 302円 1 合計 3514円 開発スケジュール
MIRS1504の開発スケジュールを以下に示す。
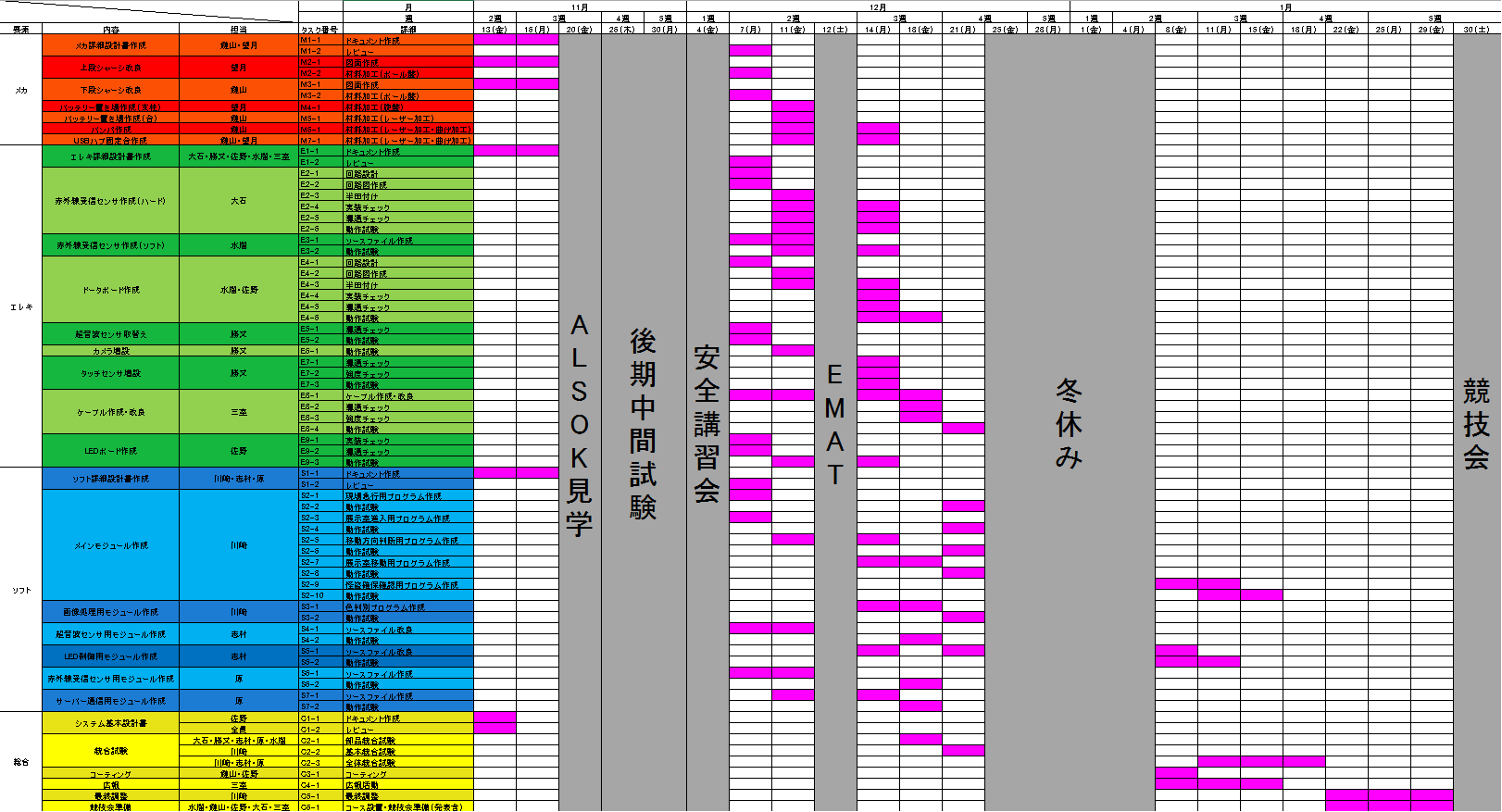 Fig.7 ガントチャート
Fig.7 ガントチャート
沼津工業高等専門学校 電子制御工学科