はじめに
本ドキュメントは、競技会攻略のためのシステムの確立を目的とする。
システム概要
青い鳥となったMIRSが巡回、怪盗の確保を行う。
- 警備状況をツイートしながら巡回する。
- 宝物を確認したとき音を出して知らせる。
- 怪盗進入の報告を受けたら進入口を監視する。
- 怪盗を発見次第、音と光を出しながら追跡・確保する。
開発項目
競技会攻略にむけた開発項目を以下に示す。
- 怪盗確保のためのシステム
開発項目 内容 タイヤ・シャーシ・バンパの変更 タイヤを任意の幅にし、シャーシの形を変えることでMIRSの形状をスマートにする。 射出機構の実装・動作回路、動作プログラムの作成 怪盗の風船を割るための機能を構築する。 モータードライバの設計・モータ制御ボードの作成 電流の許容範囲の大きい、モーター周辺の回路を新規作成する。 目的地点に到達する関数の作成 自己位置を把握しながら巡回を行うため。 怪盗を発見するための画像処理を行う関数の作成 怪盗の風船を発見し割るため。 その他の関数は既存のものを使う。
- パフォーマンスを行うためのシステム
開発項目 内容 機体外装の作成 外装を制作することで見た目を改善する。 FPGAボードの回路変更・Arduinoとの接続 FPGAボードとArduinoが通信でやり取りできるようにする。 センサー等のCNの増設 ジャンパ線で接続はしないでpinケーブルで通信する。 LED装飾・LED装飾プログラム作成 LEDを用いて見栄えをよくする。 音声回路の作成・音声出力 音声によりMIRSの動作をガイドする。 Twitterのつぶやき機能によるパフォーマンス MIRSの状態を把握するため。
動作シナリオ
- 発進
MIRSにリプを送るか、スタートボタン(タッチセンサ)を押すと発進することを考えている。
- 宝の巡回
30秒以内に一つ目の小部屋に入り宝を確認する。1分以内に二つ目の宝を確認する。
この際、小部屋へ侵入したかどうかは、左右の超音波センサの測定距離により判別する。
- 怪盗侵入
宝の巡回を終了、または怪盗侵入の情報を受け取ったら、フィールドの中央まで移動し、怪盗確保に専念する。
- 怪盗認識
中央で回転しながら、360度を警戒する。
風船の色により怪盗の確認を行う。
発見したら怪盗に突進する。
- 射出機構
怪盗に5[cm]程度まで近づいたと判断したら、針を射出する。
機能・性能
競技レベル
- 競技開始から怪盗侵入までに小部屋を2つ以上巡回する。
- 怪盗の侵入発覚後は逮捕に努める。
- 怪盗発見後、1分で逮捕を目標とする。
基本機能
- 走行機能
- 最高速度50[cm/s]を目標とする。
- 巡回時は25[cm/s]程度とする。
- 自己位置認識
- csvを用いてマップの情報を格納
- 追尾性能
- 三枚の画像を撮り比較することで、怪盗の移動方向を判別し、追尾する。
- 風船割り機能
- 二本の射出される針で、あたる範囲が広くなる。
拡張機能
- Twitter機能
- Twitterを使いMIRSが実況する。
- 音声出力機能
- MIRSがアクションしたことを知らせる。
- LED機能
- 見栄えをよくする。
- MIRSがアクションしたことを知らせる。
システム構成
ハードウェア構成
構成概要
シャーシ・バンパ材料を変更、新規作成
小型化をし、動作効率の上昇。形状を円形にして壁に引っかかるリスクを減らす。材料をアルミ複合板にして、小型化を図る。
上段シャーシの直径は24[cm]、中・下段シャーシの直径は36[cm]とし、高さは支柱×2と外装の頭の高さを考慮して、目安は35[cm]とする。
重量の目安としてはシャーシの材料を変更し、外装などのパフォーマンス面等を含めた時、標準機の重量より多少軽くなるようにする。
タイヤの新規作成
シャーシ新規作成、機体小型化のためタイヤも小型化する。3DCADでタイヤのデータを作成し、3Dプリンタにより作成する。
タイヤの直径は標準機とタイヤと変わらない、13[cm]で、幅は1[cm]で設計する。
射出機構の実装
怪盗の風船を割り、怪盗を確保するため。
2本の針型の機構を作成する。3DCADで機構のデータを作成し3Dプリンタにより作成する。
機体外装
コード類の配線を隠し、見栄えをよくする。機体の上から被させられるような外装を作成する。ツイッターのロゴにちなんで鳥型の外装を作成する。
概観図
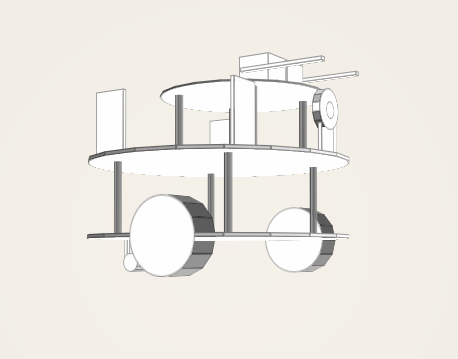
概観図作成内容
要素 概要 担当者 シャーシ 材料をアルミ複合板に変更・新規作成 萩原 バンパ 材料をアルミ複合板に変更・新規作成 萩原 タイヤ 3Dプリンタで新規作成する予定 土屋 射出機構 2本の針型の機構を作成 土屋
吉村機体外装 機体の上から被せる外装を作成 吉村 カメラ2台 前後に1台ずつカメラを設置 萩原
使用部品
購入予定物品 使用用途 購入場所 価格 新規購入 既存部品 アルミ複合板 300×300 (3[mm]) バンパ・上段シャーシ材料の変更に用いる ホームアシストで購入予定 約572円×2 ○ アルミ複合板 450×450 (3[mm]) 中下段シャーシ材料の変更に用いる ホームアシストで購入予定 約961円×2 ○ タッチセンサ 壁などの衝突の合図の確認のため SS-5GL 160円×1 ○ 3Dプリンタの樹脂 射出機構・タイヤに使用する。 樹脂が足りなくなったらD科から購入 約???円 ○ USBカメラ 画像処理に使用する なし 無料 ○ 合計 3,226円
エレクトロニクス構成
構成概要
モータドライバおよび制御回路の再設計
現状のモータドライバではモータの最高効率を引き出せないため、出力を今より上げるために再設計する
また、それに伴ってモータ制御ボードの拡張も必要になるため、制御ボードそのものの再設計も行う
射出機構制御のための回路の設計
怪盗機確保の際に使用する射出機構の制御には専用の制御回路が必要だが、各班で設計となるため、班の仕様にあわせて制御回路を新しく作成する
FPGAボード回路の変更およびセンサーチャンネルの増設
射出機構の制御および音声を発するためのON/OFF制御信号入力のためにArduinoを用いる
そのため、Arduinoを使用できるようにFPGAボードにArduinoを搭載するための回路を新規に作成、また制御に使用するセンサーチャンネルも増設する
LED装飾の作成
チームコンセプトである「魅ルス ~ 勝利を呟く ~ 」を体現するために、観客にも見た目で楽しんでいただけるよう、LEDによるライトパフォーマンスのために作成する
音声回路の作成
音声を発生させる信号はArduinoから送られてくるが、実際に音声を発するものがないと音声を発することができない
そのため、音声を発生させる回路を新たに設計する
構成図
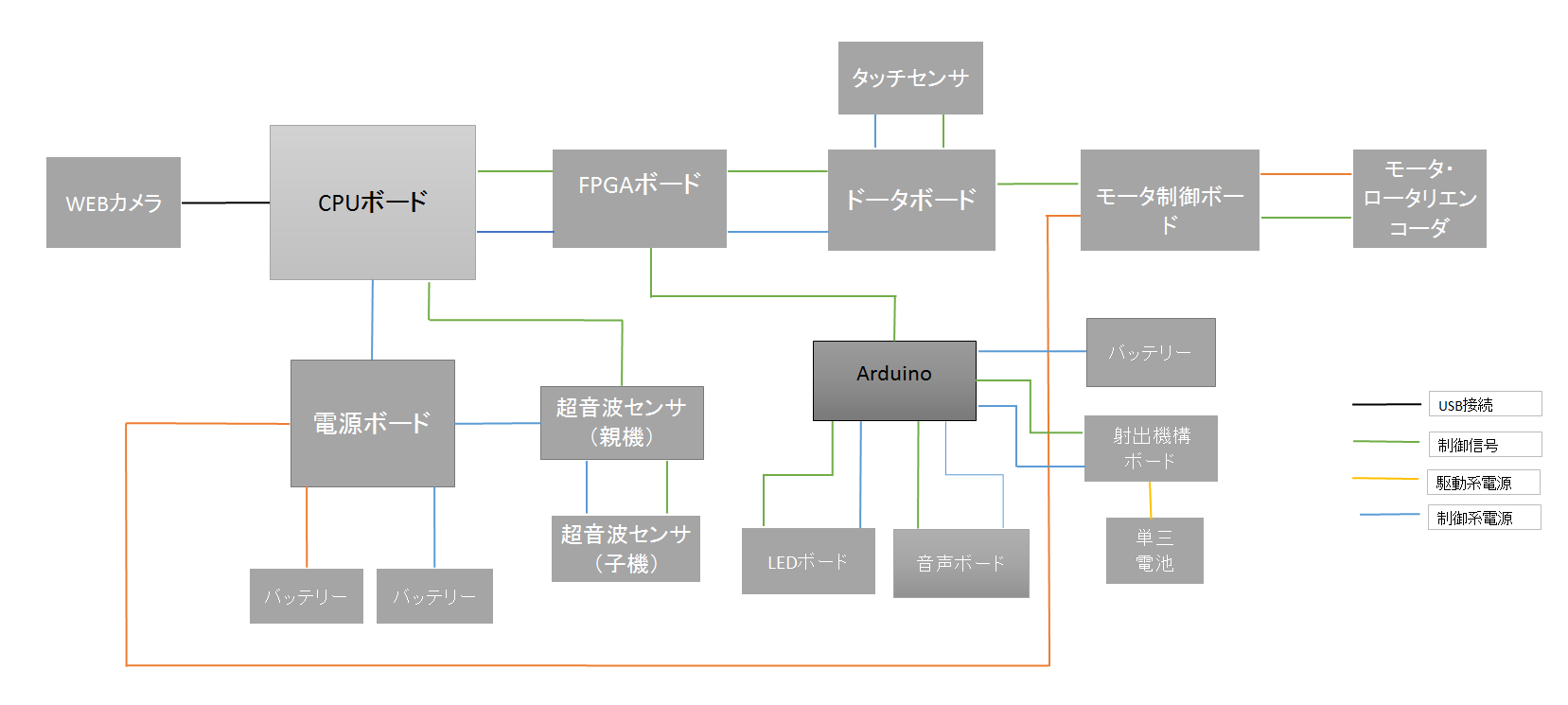
電気系統
作成内容
要素を以下に示す。要素 概要 担当者 モータドライバ 十分に電流に耐えられる設計をする 海老名
早川モータ制御ボード ドライバに対応させるため 海老名
早川射出機構回路作成 DCモータを使用した回路を作成 早川 FPGAボードの回路変更 Arduinoと接続するため 太田
高村センサーのCNの増設 ArduinoのCNに接続できる基板を作成 太田 LED装飾 外装に合わせて装飾を施す 高村 音声回路作成 音を用いてMIRSのアクションを観客に知らせる 海老名 超音波センサ 標準機のものを用いる
使用部品
購入予定物品 使用用途 購入場所 価格 新規購入 既存部品 Arduino Mega 2560 R3 射出機構・パフォーマンス面で使用 Arduino Uno R3 約5,832円÷2=2,916円? ×1 ○ DCモータ 射出機構の駆動部に使用する 【ITEM70103】ユニバーサルギヤーボックス 約570円×1 ○ バッテリーもしくは乾電池 射出機構用のバッテリー、乾電池 ホームアシストで4本セット以上を購入 約600円 ○ 電池ボックス 射出機構の電源供給 電池ボックス 単3×4本用(フタ付プラスチック・スイッチ付) 約110円 ○ 超高輝度LED 光を用いて見栄えを良くする。 超高輝度5mm赤色LED 15度 (10個入) 約150円×1 ○ スピーカー 音声出力のため。 ダイナミックスピーカー 8Ω0.5W50mmΦ FA200C 約70円×2 ○ 音声LSI しゃべらせるための声のライブラリに使用する。 音声合成LSI ATP3011F4-PU(かわいい系の女声) 約850円 ○ Arduino用 ピンヘッダ Arduinoとオリジナル基板を接続させるために使用する。 細いピンヘッダ 20P 約41円×1 ○ モータドライバの部品 モータドライバの作成に使用 未定 約円 ○ 合計 5,377円
ソフトウェア構成
構成概要
MIRSで動作する関数
怪盗確認の画像処理
怪盗の風船の色は赤色で固定なのでカメラで円形でかつ赤色を判断できた場合、怪盗が確認できたとする。
写真を3枚撮り、写真を比べ、怪盗の写っている位置のずれから怪盗の移動方向を判別する。
画像処理は基本的に機体が静止しているときに行うことにする。
目的地点に到達する関数
.csvを用いた競技場モデリングによる自己位置把握機能。
自己位置把握を用いた目的地へのルート算出機能及び移動機能。
Twitterのつぶやき機能
Ruby Twitter Gemを用いてスレッド処理により実装予定。
現時点ではツイート機能及び画像投稿機能を予定しているがタイムラインの取得やお気に入りの登録及びDMの送信など技術的に可能なことは多々ある為、
処理の際のCPUの負荷との折り合いを見て機能を追加する。
Arduinoで動作する関数
射出機構の動作
PWM制御を使い、時間で区切って機構の出し入れを行う。
機構の針を出したまま走行することはセットを傷つける危険性があるので怪盗を見失った際に機構を収納することにする。
音声出力
MIRSが何かをアクションしたこと、または動作の効果音などをしゃべらせてお知らせする。
LED装飾
MIRSの外装に加え、光により見栄えを良くする。また、音声出力と同様にMIRSがアクションしたことを光でお知らせする。
- 上記以外の関数は既存のものを用いる。
モジュール構成図
下記にプログラムの構成図を示す。
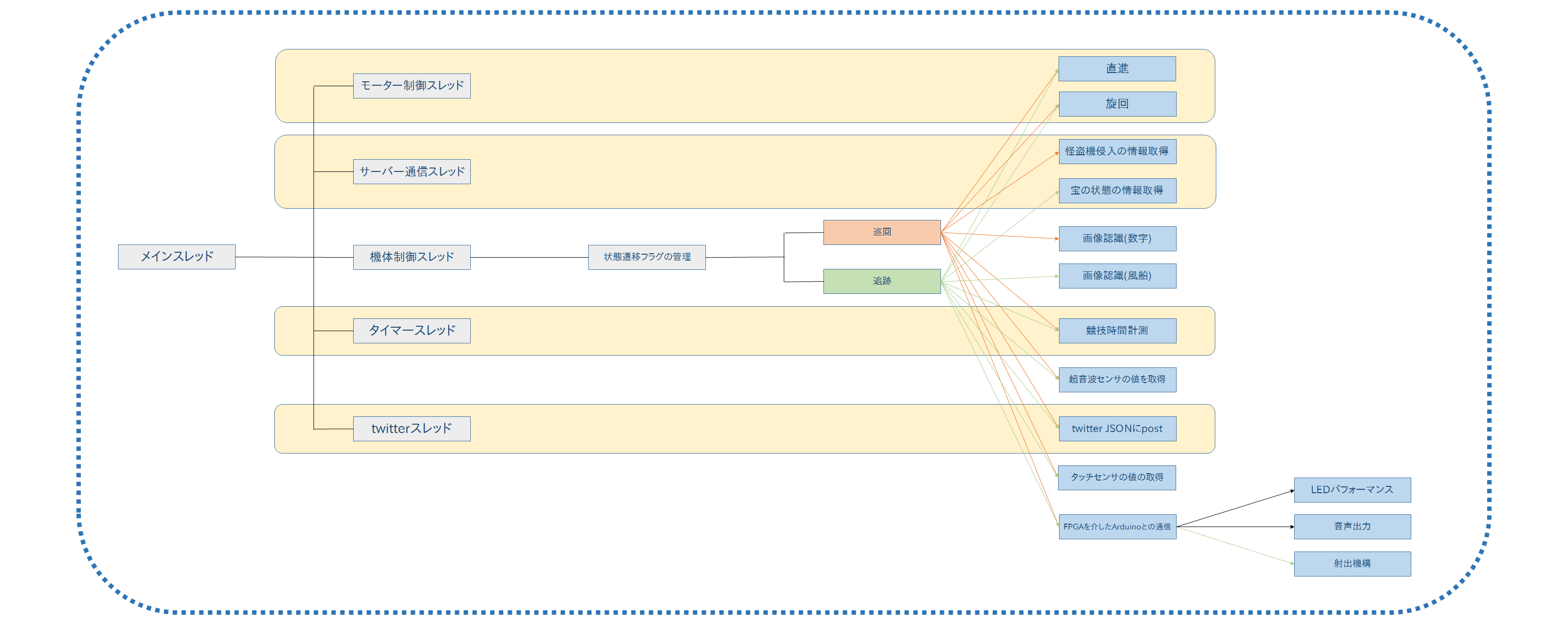
モジュール構成図
モジュール一覧表
要素 概要 担当者 直進 モータの出力比やPIDパラメータを調整し正確に動作するプログラムを作成する 加藤 旋回 モータの出力比やPIDパラメータを調整し正確に動作するプログラムを作成する。 加藤 怪盗機侵入の情報取得 サーバー関係のプログラムについてはCP班からのアナウンスを待つ 加藤 宝の状態の情報取得 サーバー関係のプログラムについてはCP班からのアナウンスを待つ 加藤 画像認識(数字) 宝発見のための画像処理プログラムを作成する。 石井 画像認識(風船) 怪盗機の目印である赤色を発見のための画像処理プログラムを作成する。 石井 競技時間計測 競技開始からの時間を測定する。この値は状態遷移に用いる。 加藤 超音波センサの値取得 既存のプログラムを使用する。 / twitterのJSONにpost Rubyを用いてツイートをするプログラムを作成する。 加藤 タッチセンサの値取得 既存のプログラムを使用する。 / LEDパフォーマンス Arduinoを用いて動作させる。 石井 音声出力 Arduinoを用いて動作させる。 石井 射出機構 Arduinoを用いて動作させる。PWM制御により指定時間で動作するようにする。 石井 合計費用
合計 8,603円 + 必要に応じて3Dプリンタの樹脂 + モータドライバの部品



開発スケジュール
開発日程予定を以下に示す。
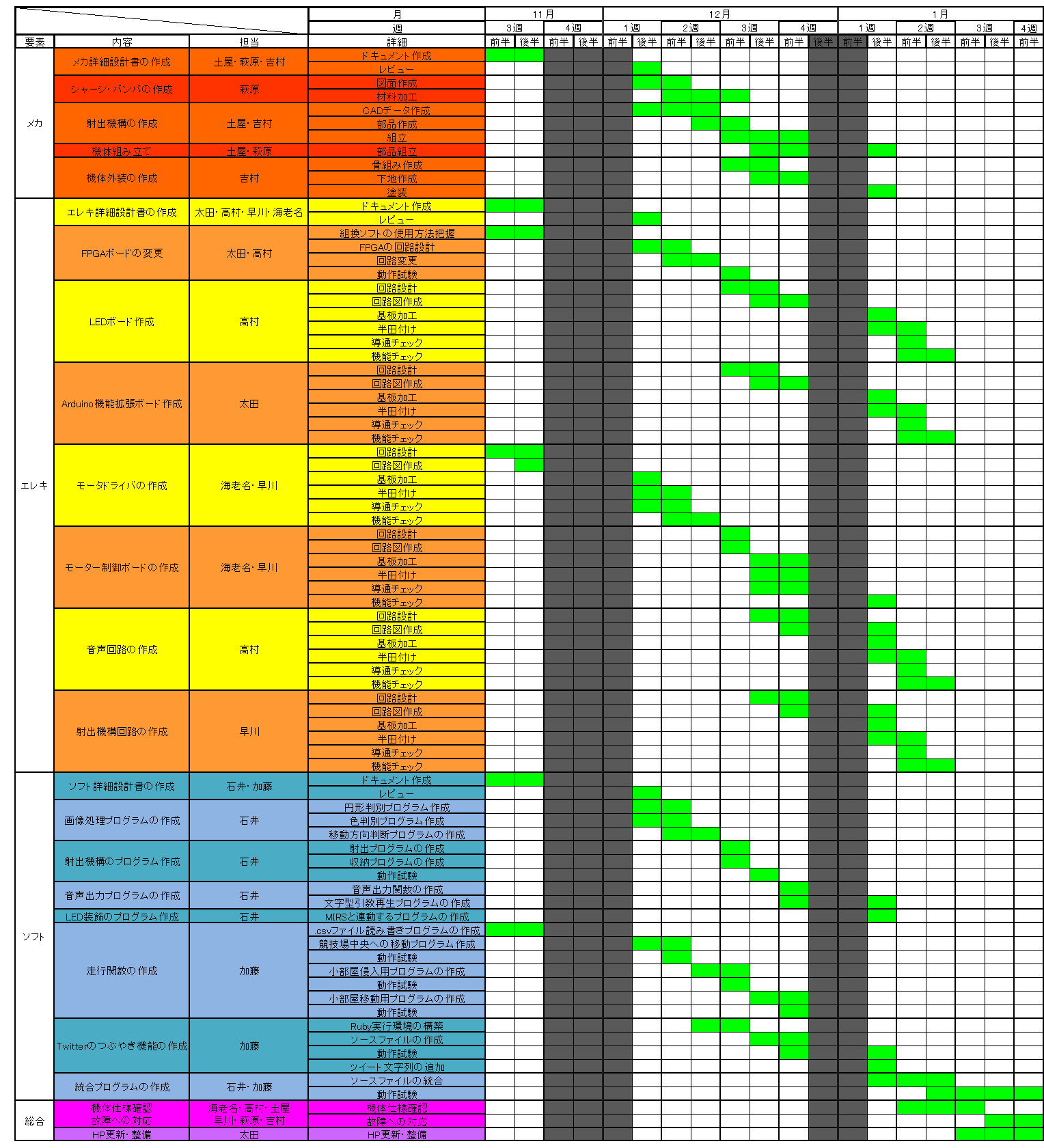
開発スケジュール