| 名称 |
MIRS1303 競技会プログラム開発計画書 |
| 番号 |
MIRS1303-PLAN-0003 |
最終更新:2013.10.01
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2013.09.30 |
杉山春樹・飯塚洸平 |
|
第1版 |
| A02 |
2013.10.01 |
杉山春樹 |
江上先生
|
担当者追記、小部屋の説明文を追加 |
目次
1.はじめに
-
本ドキュメントは、MIRS1303の標準機で迷路を攻略するための戦略・プログラム設計及び開発過程について記したドキュメントである。
2.基本戦略
-
標準プログラムを最大限活用し、ゴールすることを最優先に目指す。
3.攻略するコース
今回攻略するコースを以下に示す。
事前にコースがわかっているため、今回はコースに合わせた攻略プログラムを作成する。
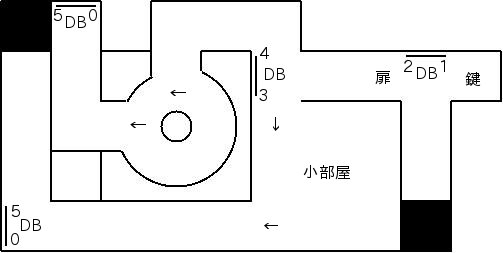
図1 攻略するコース
4.動作のながれ
全体の動作のながれを簡単に示す
画像認識後の各仕掛け攻略プログラムの優先順位は
- ゴール>小部屋>ロータリー=鍵
の順とする。
基本的には通路走行を行い、DBを読んで各仕掛けを攻略していく。
DBが読めなかったときは、右に2マス以上空いていれば右に、空いていなければ左に曲がる。また、白線を4回検知した場合、ゴール攻略に移る(DB前の白線は3つで、これ以上は検知しないため)。あらかじめコースがわかっているためこのような攻略法をとった。
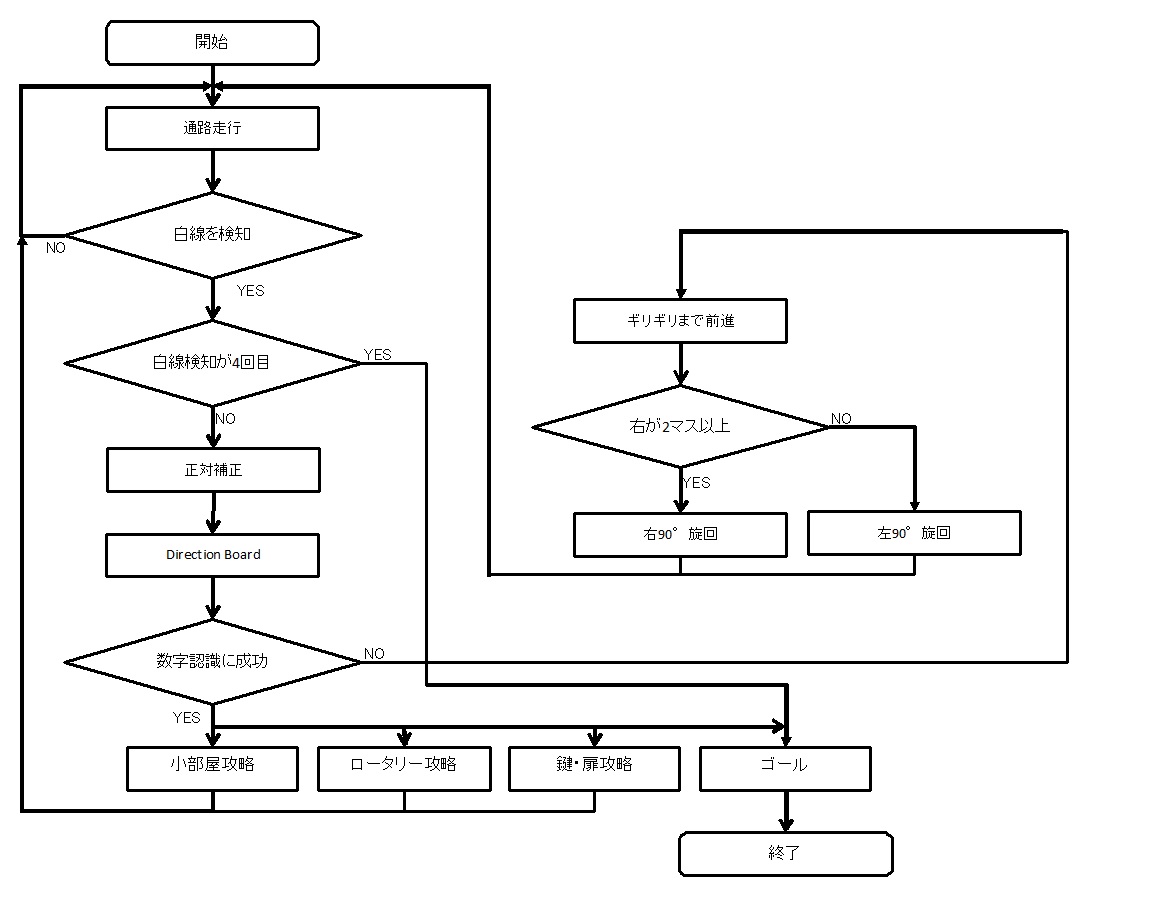
図2 動作の流れ
5.標準プログラムと作成するプログラム
標準プログラムを改良したことで、走行制御などはある程度の精度で行うことができる。そこで、この標準プログラムをベースとして、更に改良を加えながら迷路を攻略していく。
以下に、標準プログラムで達成されている機能と、作る必要がある機能を示す。
- 標準プログラムで達成されている機能
-
直進走行
旋回走行
その場回転
正対補正
通路走行
Direction Board(数字認識)
- 作成する機能
-
小部屋攻略…担当者 杉山春樹
ゴール攻略…担当者 飯塚洸平
ロータリー、鍵・扉は回避できるため、今回の攻略では作成しない。
6.詳細設計
動作説明と、必要に応じてフローチャートを以下に示す
-
- 通路走行
標準の通路走行プログラムを適宜改良して使用する。標準機の超音波センサ取り付け位置から変更をすることになったため(前方2つ、左1つ→前方2つ、右1つ)、左右の壁との距離を測る部分などは適宜変更する。
- Direction Board(画像認識)
標準プログラムを使用する。画像認識前に正対補正(標準プログラム)を行わせる。時間の都合上、10回の試行回数を3回に減らしている。また、画像認識に失敗した場合も進むようにしている。
- 小部屋
前方の超音波センサで壁との距離を測り、小部屋に入ったかどうかを判断する。その後、右の壁伝いに進んでいき、超音波センサにより出口を探す。
出口の方向を前方に見たとき、小部屋のプログラムを抜けて、通路走行へと戻る。
小部屋は、標準プログラムの前進・その場回転のみを組み合わせて走行する。また、条件分岐は超音波で行い、値をローカル変数に保持して行う。また、フローチャートの値の単位はcmである。
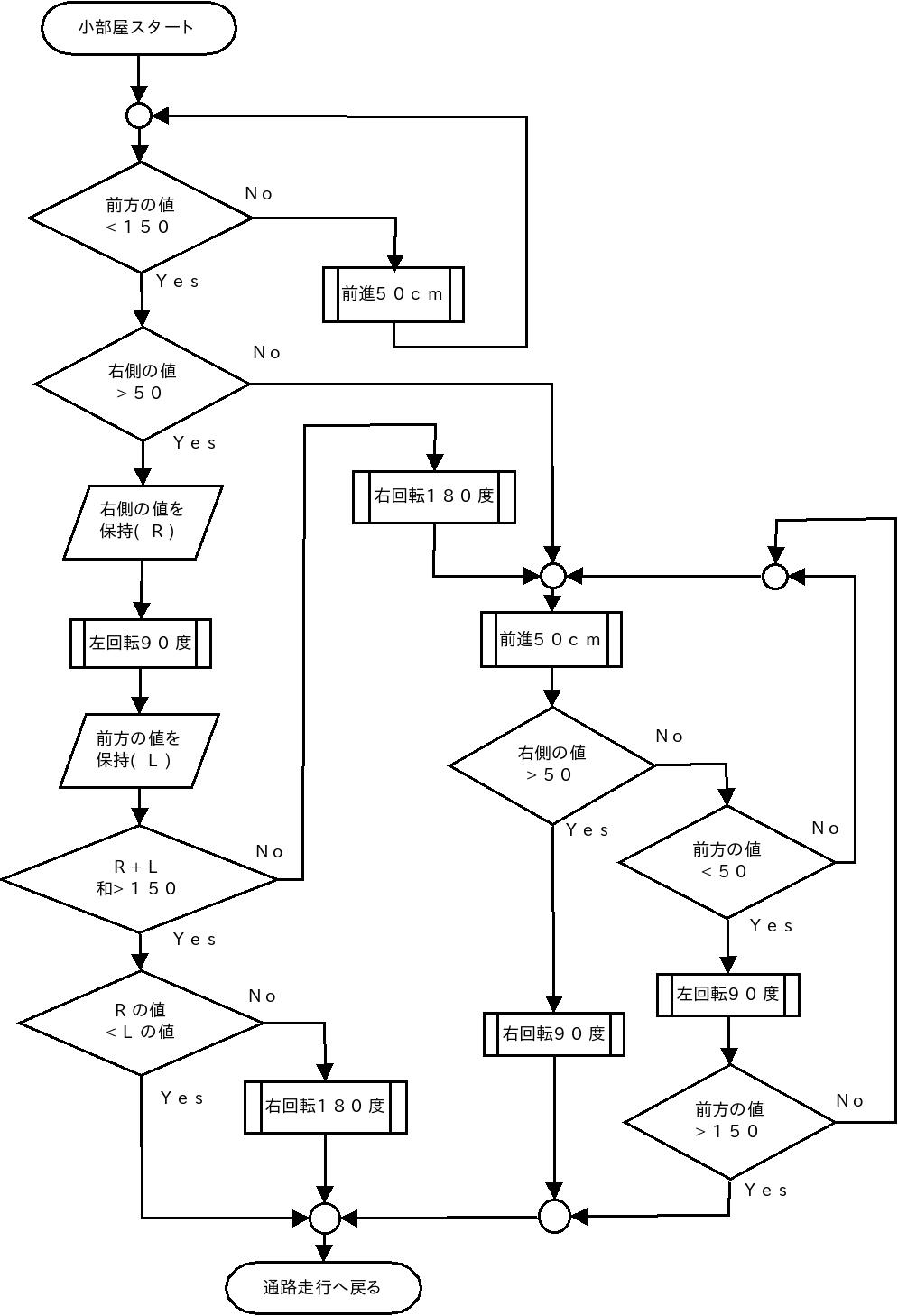 図3 小部屋攻略
図3 小部屋攻略
- ゴール
Direction Boardの画像認識からゴールを見つけた場合その方向に進む。基本的には通路走行と同じだが、白線を検知するとゴールにMIRSが収まる程度前進した後停止し、プログラムの終了とする。
また、白線を4回検知した場合もゴールとみなすようにしている。
7.開発日程
| 8/7 |
8/8 |
8/9 |
8/10 |
| 設計 |
基本的な流れの作成 |
基本的な流れの作成
各仕掛け攻略の精度向上 |
パラメータ等の最終調整 |
MIRS1303ドキュメント管理台帳