| 名称 |
MIRS1203 標準機競技用システム開発計画書 |
| 番号 |
MIRS1203-PLAN-0004 |
最終更新日:2012.10.22
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2012.10.22 |
稲鶴和也 |
|
|
目次
1.はじめに
-
本ドキュメントは、MIRS1203の標準機で迷路を攻略するための戦略・プログラム設計及び開発過程について記したドキュメントである。
2.基本戦略
-
直進性能に優れたプログラム(PD制御)を駆使し、スムースな走行で時間短縮を狙う。
3.動作のながれ
全体の動作のながれを簡単に示す
以上のプログラムを組み合わせメインプログラムを作成する。画像認識後の各仕掛け攻略プログラムの優先順位は鍵→小部屋→ロータリー→ゴールの順とする。扉の攻略は、鍵のプログラムに含まれる。(扉のみのプログラムはない)

図1
4.詳細設計
動作説明と、必要に応じてフローチャートを以下に示す
-
- 通路走行
標準の直進プログラムがうまく動作し、まっすぐに直進させることができたので、そのプログラムを応用して作成する。
超音波センサで左右の壁との距離を測定しながら走行させることを考えているが、その間隔やタイミングに関しては開発しながら最適なものを探し、決定する。

図2
- Direction Board
標準機基本動作試験で使用した、標準プログラムを改良したものを使用する。必要だと感じた場合、横方向に2つの超音波センサを取り付け、画像認識前に正対補正を行わせる。
- ロータリー
中央の円柱にぶつかったらロータリーに入ったと判断し、90°ずつ旋回して超音波センサにより出口を探す。

図3
- 小部屋
左右両方、もしくはどちらかの超音波センサで検知した壁との距離が遠くなったら小部屋に入ったと判断し、右の壁伝いに進んでいき、超音波センサにより出口を探す。
 図4
図4
- 鍵・扉
Direction Boardの画像認識によりどちらに鍵があるかを判断し、鍵側に直進する。正面のタッチセンサが反応した時点で鍵に接触したと判断し、180°旋回して攻略プログラムを終了する。

図5
- ゴール
Direction Boardの画像認識からゴールを見つけた場合その方向に進む。基本的には通路走行と同じだが、白線を検知すると停止しプログラムの終了とする。
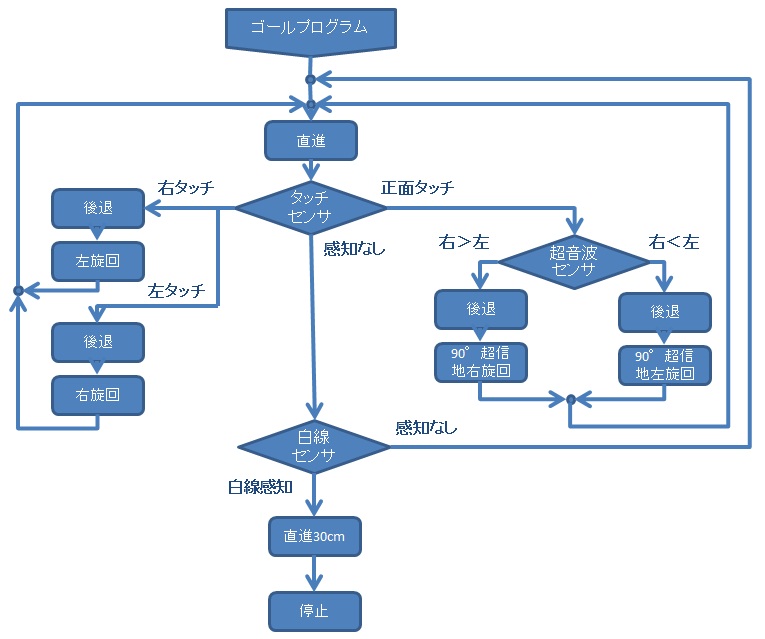
図6
5.チェック項目
-
- 通路走行
□5マス分(1マス50cm×50cm)直進できるか試験する。5回連続成功でOK。
- Direction Board
□直進後、白線で止まり画像を認識するかテストする。使用する全てのDBで成功すればOK。
- ロータリー
□DBを読んだと仮定して、90°・180°・270°と出口をずらして全て成功すればOK。
- 小部屋
□すべての種類の小部屋に対する試験は不可能なため,高専祭用競技場の小部屋を5回クリアすればOK。
- 鍵・扉
□タッチした後、180°超信地旋回し、コースに帰できるかを試験する。5回成功でOK。
- ゴール
□DBを読んだと仮定して、ゴールまで直進し停止できるか試験する。5回成功でOK。
MIRS1203ドキュメント管理台帳