このドキュメントは、MIRS1001班の通路プログラムの概要を記述したものである。
・確実にクリアする。
・例外処理が確実に行える。
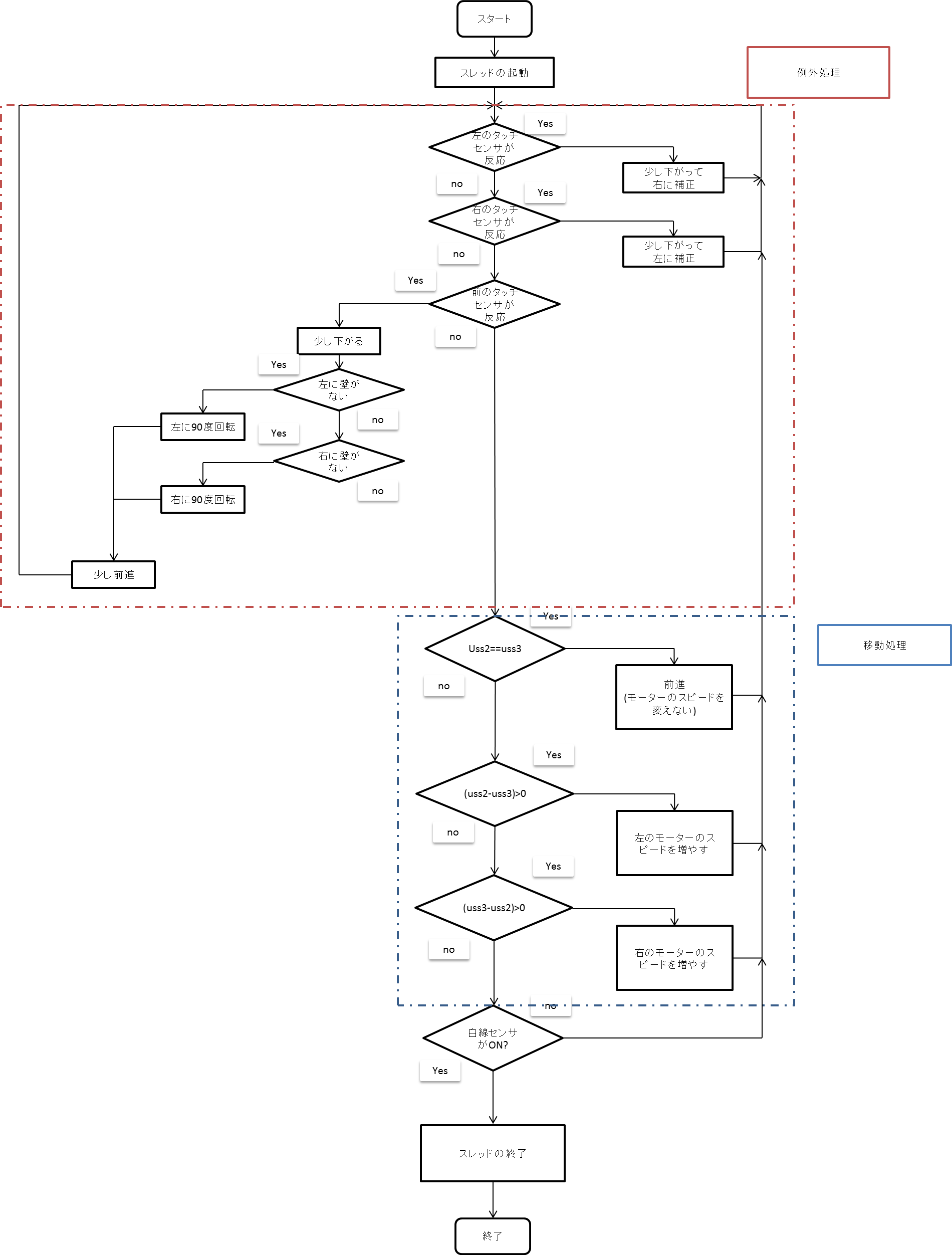
・プログラム開始後、スレッドを起動し、常にタッチセンサ、白線センサの状態、超音波センサで測定される壁との距離の値を監視する。
・MIRSと左右の壁との距離に応じて左右のモーターのスピードを変えて、通路内を補正して通行する。
・左右のタッチセンサが押された場合は、通路の内側に戻るように補正する。また、前のタッチセンサが押された場合、超音波センサで左右の壁の有無を判断し、壁の無いほうに90度回転、その後は直進を行う。
・白線を見つけた場合、少し前に進み、左右の白線センサが白線の上または白線の前に出るようにした後停止する。 このようにする理由は正対補正プログラム仕様書(3.概要)参照。