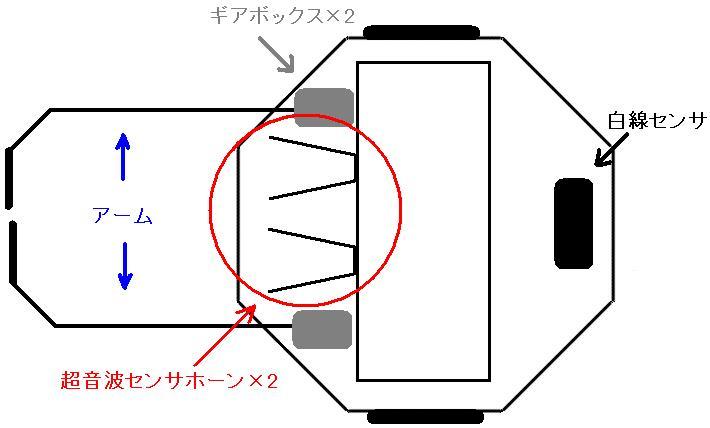
fig.1 MIRS外観図
| 沼津高専 電子制御工学科 | ||||||
| ||||||
| 改訂記録 | ||||||
|---|---|---|---|---|---|---|
| 版数 | 作成日 | 作成者 | 承認 | 改訂内容 | ||
| A01 | 2008.9.17 | 浦田・中村・森 | 浦田 | 初版 | ||
| A02 | 2008.9.17 | 早苗 | 浦田 | アームの動作原理、形状の説明追加・MIRS外観図の追加 | ||
| A03 | 2008.9.19 | 森 | 浦田 | ポスト読取機構外観図の追加 | ||
| A04 | 2008.9.19 | 中村 | 浦田 | 部品表の追加 | ||
| A05 | 2008.10.24 | 森 | 浦田 | ポスト番号読取機構の概観図を変更、アーム-本体接続部の概観図を追加 | ||
本ドキュメントはMIRS0804のエレクトロニクスに関する詳細設計を記述したものである。
(1)アーム
MIRS0804システム基本設計書(MIRS0804-DSGN-0002)で述べたように、ポスト獲得用のアームを実装する。
(a)取り付け位置
前部の超音波センサの横に取り付ける。下図参照。
(b)動作原理
現段階
ポストを発見、正対補正をしたあと、MIRS前方がポストに衝突するまで前進する(衝突の検知は前方のタッチセンサで行う)。
アームの長さ分後退する(アームを下ろす余地を得るため)。
アームは閉じた状態で収納されているため、そのままおろす。アームが降りきったところでアームを開く。
その状態でMIRS正面にポストが衝突するまで前進する。
アームを閉じ、MIRS本体を前後に動かすことでポストを獲得する。
アームを開き後退する。
アームを閉じ、収納する。
正対補正の精度が高い場合
超音波センサで正対補正と同時にアームの長さ分距離を確保する。
上記のことが実現すればアームを下ろす際の前進、後退が省けるため、時間短縮、誤差の減少につながる。
※超音波センサを実装し、正対補正の精度を測定後、可能であれば上記のプロセスを導入する。
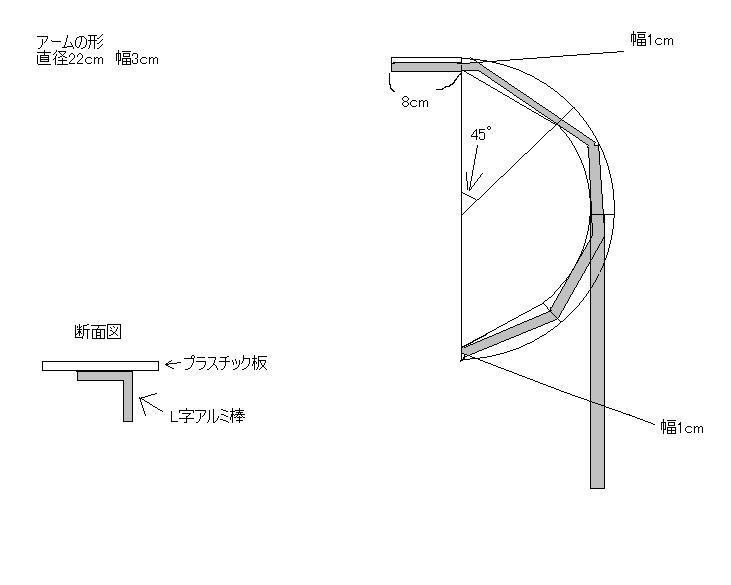
(c)形状
アームでポストを挟み込んだ状態のとき、前後に多少の余裕がもてるようにアームを設計する。
正対補正がうまくいかず、傾いた状態でポスト獲得動作に移ってしまった場合、円形ではアームを閉じこととができない状態となる可能性があるため、楕円、六角形などの形状が好ましい。
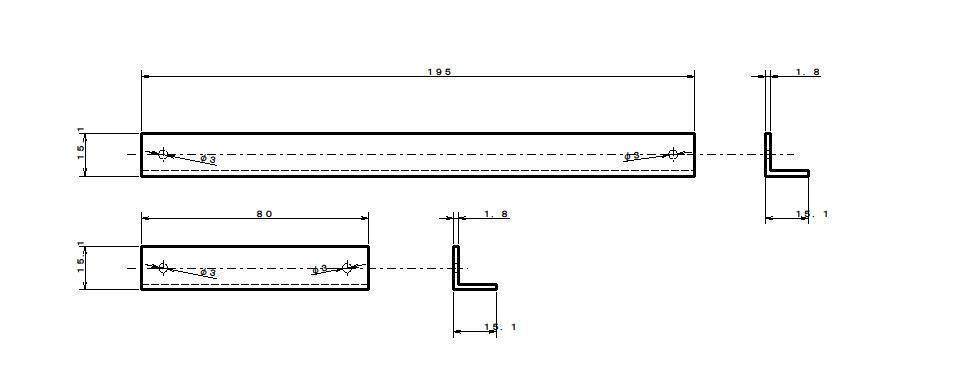
(d)部品表
アーム 部品表
| 部品名 | 数量 |
| L字材 | |
| アクリル板 | |
| ギヤーボックス | 2 |
| モータ | 2 |
| ステッピングモータ | 1 |
| 糸 | |
| M3ネジ | |
| M3ワッシャー | |
| M3ナット |
(2)ポスト番号読取機構
MIRS後方に白線センサ4つをつけたプレートをMIRSのシャーシに垂直に装備する。
白線センサをポストに接触させることでポスト番号を読み取る。
白線センサの取り付け位置は、ポストに巻かれているポスト番号を示す黒色のビニルテープの高さと一致させる。また、ポストが5つある場合を想定して上から2〜5番目のビニールテープの高さに一致させる。
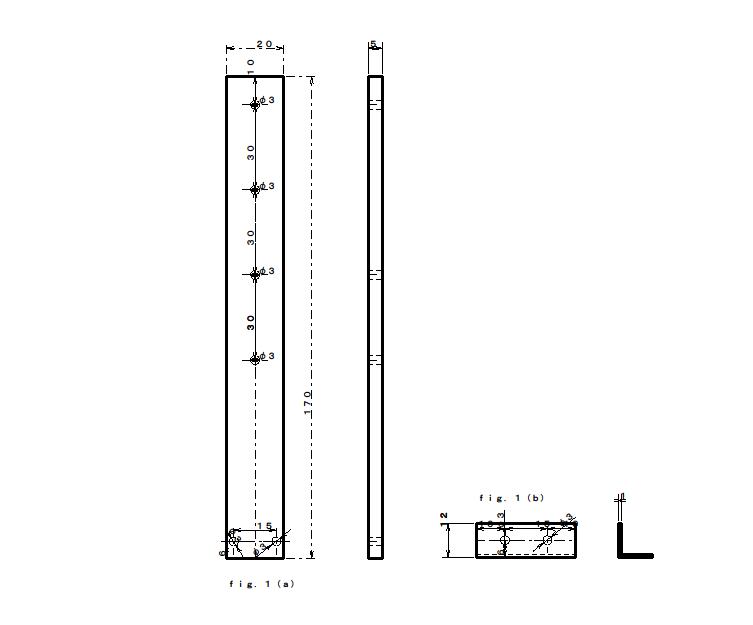
(a)部品表
ポスト番号読取機構 部品表
| 部品名 | 数量 |
| アクリル板 | |
| L金具 | 1 |
| M3ネジ | 8 |
| M3ワッシャー | 8 |
| M3ナット | 8 |