目次
1. 本ドキュメントについて2. システム概要
3. 機能・性能
4. 今後の開発内容
1. 本ドキュメントについて
-
このドキュメントは、MIRS0802のシステムの、基本的な設計を説明するものである。
2. システム概要
2.1. 動作概要
競技1回目と2回目でMIRSの動作を切り替える。
ただし、ポストの獲得動作は共通で、
両側面に取り付けられたアームを展開、ポストを挟むかたちで獲得動作を行う。
これは、周回動作によって発生する、位置の誤差をなくすためである。
以下に競技1回目、2回目の動きを示す。
ただし、ポストの獲得動作は共通で、
両側面に取り付けられたアームを展開、ポストを挟むかたちで獲得動作を行う。
これは、周回動作によって発生する、位置の誤差をなくすためである。
以下に競技1回目、2回目の動きを示す。
競技1回目
ライントレースにより競技場枠を周回し、同時に超音波センサを動作させて探索を行う。
本体左側面にポストを確認したら、停止し、90°回転、ポストの獲得動作に移る。
1回目はポスト番号に関係なく、発見したものから獲得動作を行い、
獲得と同時にポスト番号と獲得時のMIRSの位置を記録する。
本体左側面にポストを確認したら、停止し、90°回転、ポストの獲得動作に移る。
1回目はポスト番号に関係なく、発見したものから獲得動作を行い、
獲得と同時にポスト番号と獲得時のMIRSの位置を記録する。
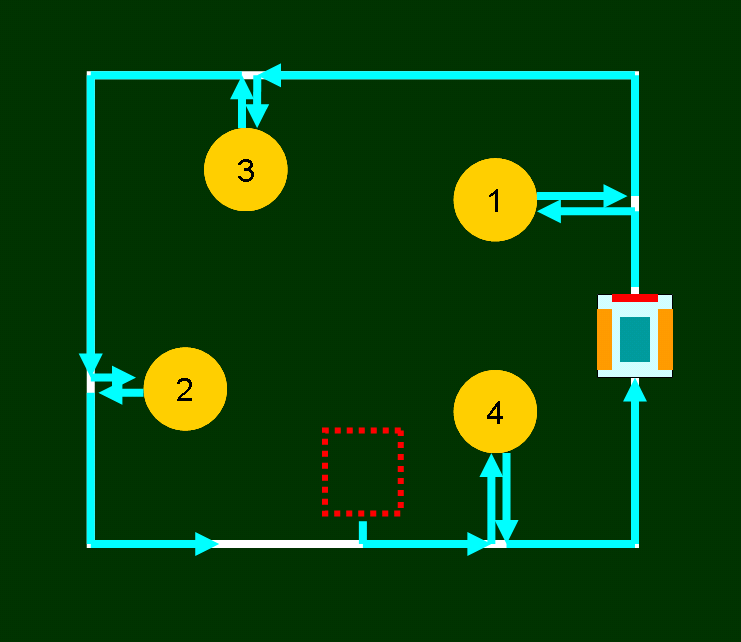
図1. 競技1回目(mv_1st.bmp)
競技2回目
競技1回目のポスト発見数に応じて、以下のように対応させる。
これにより、1回目に得たポスト情報を元に獲得するポストに直接移動できるようにし、
順番にポストを獲得することにより、高得点を狙う。
移動の際は前進と後退のライントレースを使い分ける。
①番ポストと②番ポストを未発見
時計回りで周回①番ポスト発見、②番ポスト未発見
①番が奥にある場合
①番獲得後、反時計回りで周回①番が手前にある場合
①番獲得後、時計回りで周回①番ポスト未発見、②番ポスト発見
②番が奥にある場合
時計回りで周回、①番獲得、時計回りで周回②番が手前にある場合
時計回りで周回、①番獲得,反時計回りで周回①番ポストと②番ポストを発見済み
反時計回りで周回これにより、1回目に得たポスト情報を元に獲得するポストに直接移動できるようにし、
順番にポストを獲得することにより、高得点を狙う。
移動の際は前進と後退のライントレースを使い分ける。
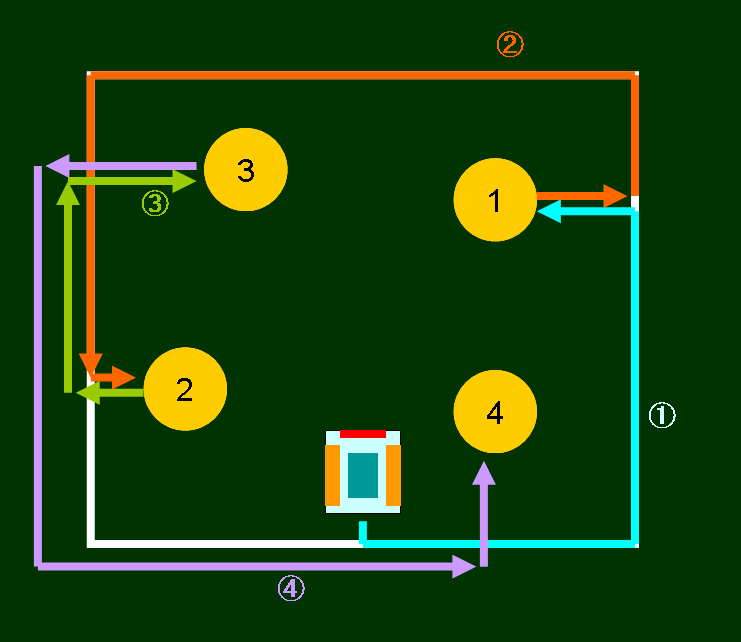
図2. 競技2回目(mv_2nd.bmp)
2.2. フローチャート
競技1回目
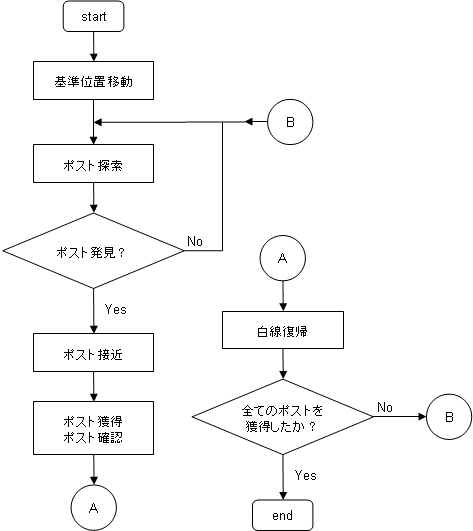
図3. 競技1回目(com_1st.bmp)
競技2回目
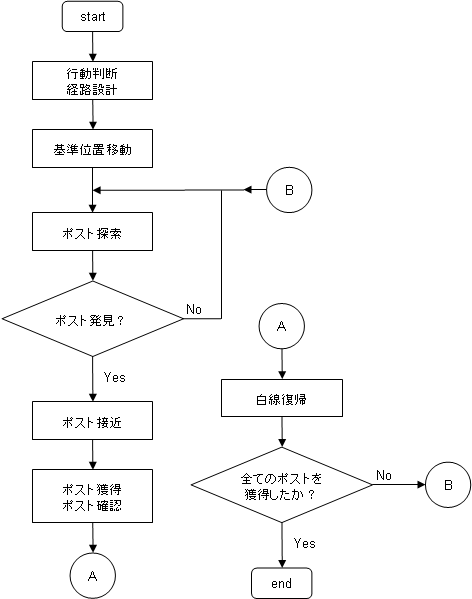
図4. 競技2回目(com_2nd.bmp)
2.3. 概観図
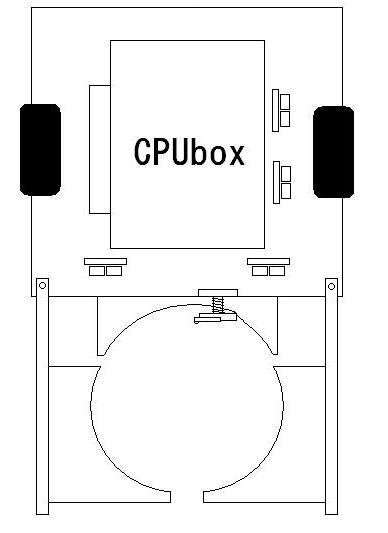
図5. 概観図(image001.jpg)
3. 機能・性能
- ポスト獲得アーム
- バーコードリーダ
- バンパー
- 塩ビ板シャーシ
- タイヤカバー
3.1. メカニクス
3.1.1. ポスト判別・獲得機構
3.1.2. その他新機構
詳細は、詳細設計書参照
- アーム用モータ制御ボード
3.2. エレクトロニクス
センサ
白線センサを追加しタッチセンサを減らした。
| センサ名 | 個数 | 用途 |
|---|---|---|
| 超音波センサ | 4 | ポスト探索・正対補正 |
| 白線センサ | 6 | ポスト番号識別・ライントレース |
| タッチセンサ | 1 | ポストへの接触感知 |
| ロータリーエンコーダ | 2 | 本体移動状況の把握 |
追加する制御ボード
- 後退動作モード
- ポスト探索モード
- 左回転モード
- ポスト接近モード
- ポスト判別モード
- ポスト獲得モード
- 周回復帰モード
- ポスト番号保存モード
- 危機回避動作
3.3. ソフトウェア
3.3.1. 動作モード
ポスト獲得後、白線のある位置まで後退する。そして、右に90°回転し、ライントレースによるポスト探索に復帰する。。
ライントレースしながら、左側の超音波センサでポストがあるか探索する。
3つの白線センサが白線を確認したら、「左回転モード」へ
ポストを発見したら、「ポスト接近モード」へ
3つの白線センサが白線を確認したら、「左回転モード」へ
ポストを発見したら、「ポスト接近モード」へ
ライントレース中、競技場枠の角まできたら90°回転、場外への進行を防ぐ。
前方の超音波センサで補正を行いながら、ポストに接近する。
バーコードリーダにあるタッチセンサにポストが接触したら、ポスト判別動作に入る
バーコードリーダにあるタッチセンサにポストが接触したら、ポスト判別動作に入る
バーコードリーダに付いている白線センサでポスト番号を判別する。
ポスト判別後、アームを動かしポストを獲得する。
獲得後、アームを本体に仕舞う
獲得後、アームを本体に仕舞う
右に90°回転する。そして、白線が見つかるまで前進する。
白線を感知したら、左に90°回転し、ライントレースを数秒する。(ポスト探索は行わない。)
その後、「ポスト探索モード」へ
白線を感知したら、左に90°回転し、ライントレースを数秒する。(ポスト探索は行わない。)
その後、「ポスト探索モード」へ
ポストを獲得したら、スタートしてからポストを発見した順番、ポスト番号、ポスト位置などのポスト情報を記憶する。
この記録を基に2回目の競技では、判別動作なしに順番どおりにポストを獲得する
この記録を基に2回目の競技では、判別動作なしに順番どおりにポストを獲得する
想定される基本プログラム外のトラブルを危機回避モードとしてスレッドを走らせ、
予定外の行動を起こしたときに緊急回避を可能にさせる。
予定外の行動を起こしたときに緊急回避を可能にさせる。
4. 今後の開発内容
- ポスト獲得機構
- アームの動作試験
- バーコードリーダのスプリング部分安定化試験
- バンパーの設計製作
- その他新機構
- シャーシ軽量化
- その他細部にわたる加工技術向上
4.1. メカニクス
- アーム制御ボードの設計、製作
- アーム制御用信号をFPGAによりINからOUTへ変更。
- FPGAの改良
4.2. エレクトロニクス
- main関数の再構成
- 新規モードの作成
- 行動制御系関数の修正
- アーム制御関連ドライバ・関数作成
- 危機回避機能の企画・作成