|
沼津高専 電子制御工学科 |
||||||
|
||||||
|
改訂記録 |
||||||
|
版数 |
作成日 |
作成者 |
承認 |
改訂内容 |
||
|
A01 |
2004.7.2 |
原、斉藤、鈴木 |
蛭ヶ谷 |
初版 |
||
目次
- はじめに
- 概要
- 機能・性能
- ソフトウェアビジビリティ
- FPGAピン割り当て
- 回路構成
はじめに
本仕様書は標準MIRS(MIRSSTND)のIOの制御を司るAT互換PC用ISA拡張ボードに搭載されているFPGAに書き込む回路情報について規定する。
この文書は主に標準機からの引用となっているが変更点であるかめらの搭載について書き足されている箇所がある。それはこの文書の目次でいうと概要、FPGAピン割り当て、回路構成(カメラモジュール)である。
概要
標準MIRS(MIRSSTND)のIO制御拡張ボードは、アリテック社のD40-10-208(以下 IO制御ボードと称す。)にMIRS用ドータボードを搭載して実現する。基板上に搭載されているFPGAはALTERA社EPC10K10QC208-4である。本ボードでは以下の周辺回路の制御部を実現する。
カメラモジュールの搭載についてはFPGAに直接デジタル信号を入れることにする。
- 車輪駆動用モータ
- ロータリーエンコーダ
- 超音波センサ
- タッチセンサ
- 白線センサ
- 赤外線センサ
- カメラモジュールとAD変換機
IO制御ボードはISAバスを介してAT互換PCと接続され、各周辺回路とはドータボー ドを介して接続される。ドータボードの役割は主としてコネクタ変換程度で、
ほとんどのデジタル制御回路はFPGA上で実現される。本仕様書はこのFPGAで実 現する回路について規定する。
図1にIO制御ボード内のFPGAとISAバスおよび周辺回路の接続関係を示す。

図1
アリテック社の本ボードはISAバス側の配線は購入時からされており、その詳 細はアリテック社のマニュアル"マイコンビルダー取扱説明書"に記されている。
機能・性能
- 車輪駆動用モータ
モータの速度制御はPWM信号によって行う。回転方向とPWM信号をHブリッジ LL298(STMicroelectoronics)の2つ入力信号に変換して出力する。 - ロータリーエンコーダ
ロータリエンコーダの2相のパルスをカウントする16bitのカウンタが中心であ る。順回転で加算され、逆回転で減算される。回転方向の順、逆はロータリエンコーダの2相のパルスにより判別され、AがBより進んでいるとき順回転となる。負の値は2の補数表現であらわされる。 - 超音波センサ
2bitの超音波センサ番号をUSS制御ポートアドレスにに書き込むと、幅0.4[ms]、 周波数約40[kHz]の超音波パルスを送信する。同時に回りこみ除去回路へのガー ドタイミングパルスを出力する。又、超音波センサから受信信号を受けとると、割り込み信号を、割り込み信号のリセットを行うまでCPUへ出力し続ける。 - 汎用入力ポート
タッチセンサ、白線センサ、赤外線センサはその検出信号が、そのまま汎用入 力ポートに入力される。ソフトウェアから汎用入力ポートを読み込むとその時 点の各センサの状態が読める。 - 赤外線コード検出
ポストに設けられた赤外線コード送信器から出力される赤外線コードを復調す る。コードは12bit、コードを検出するとflagビットがsetされコードが読み込まれる とflagはリセットされる。赤外線コードの復調は使用するFPGAのゲート数の不 足から1つのセンサのみとする。ただし、4つの赤外線センサのうちコード復 調を行うセンサの選択ができるようにする。 - カメラモジュール
- ADコンバータ
- ローパスフィルタ
ソフトウェアビジビリティ
IOポート仕様
|
名称 |
IO port Address[hex] |
R/W |
Port Name |
機能 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
LCD |
0100 |
R/W |
LCD Control |
LCDの制御レジスタ
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
0102 |
R/W |
LCD Data |
LCDのデータレジスタ
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
PWM |
0110 |
W |
PWM 0 |
PWM出力0信号制御
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
0112 |
W |
PWM 1 |
PWM出力1信号制御
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Rotary |
0120 |
R/W |
RE_X |
ロータリエンコーダXの制御
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
0122 |
R/W |
RE_Y |
ロータリエンコーダYの制御 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
超音波 |
0130 |
W |
USS_Send |
超音波信号の送信
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
0132 |
W |
USS_Ctl |
超音波受信信号割り込みの制御
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
汎用 |
0140 |
R |
GIO |
デジタル入力入力
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
赤外線 |
0150 |
W |
IRS_sel |
赤外線コード復調センサの指定
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
0152 |
R |
Ir_Code |
赤外線検出コード
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
割り込みポート仕様
|
IRQ番号 |
信号名称 |
機能 |
|
5 |
USS_int |
超音波検出の立ち上が りでsetされ、USS_Ctlに0x01を書き込むとリセットされる。 |
FPGAピン割り当て
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
回路構成
図2に回路全体のブロック図を示す。

図2
1.アドレスデコーダ部
ISAバスのアドレス信号をデコードし各モジュールの選 択信号を生成する。
2.PWMモジュール
図3
モータ速度制御のためのPWM信号を生成する。IO-Write命令のデータ8bit を保持するレジスタとフリーランのカウンタの値を比較することにより レジスタ値に応じたDuty比のPWM信号を生成する。
3.ロータリエンコーダモジュール
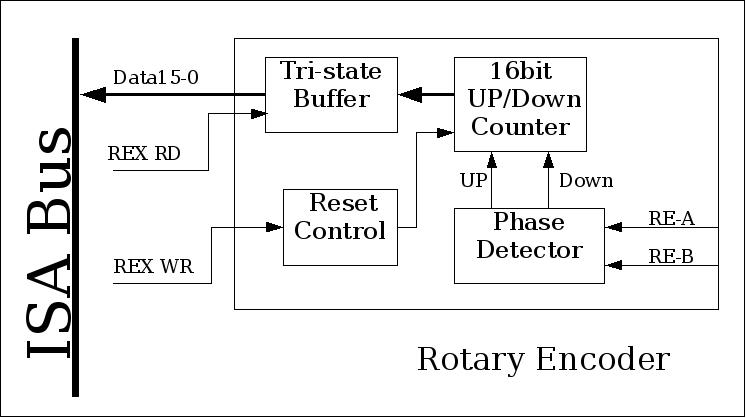
図4
ロータリエンコーダからのA相とB相のパルスの位相を比較し、カウントアップ 信号とカウントダウン信号を生成する。それらの信号で16bitのカウンタを UP/Downする。
4.超音波センサモジュール
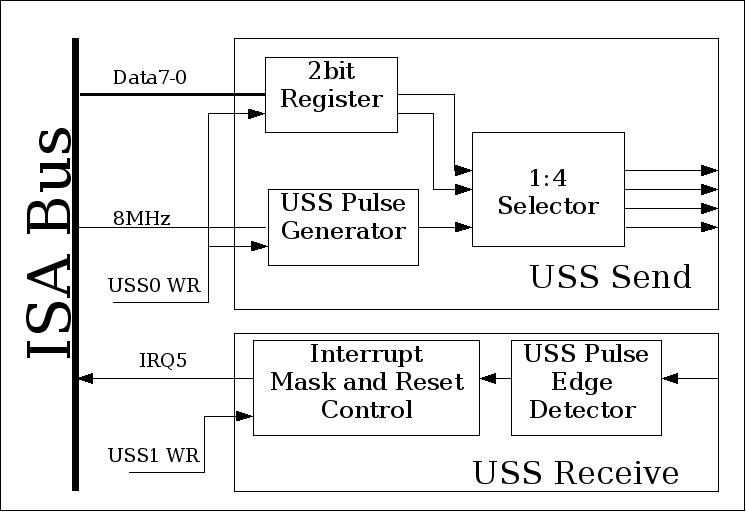
図5
センサ選択IO書き込み命令の下位2bitをレジスタに保持し、その出力と1:4 のセレクタでセンサを選択する。受信信号の前縁微分信号で割り込み信号を flipflopにラッチし、IRQ5を出力する。割り込みマスク信号はffに保持され マスク信号が1の時はIR5に出力しない。
5.汎用入力ポートモジュール
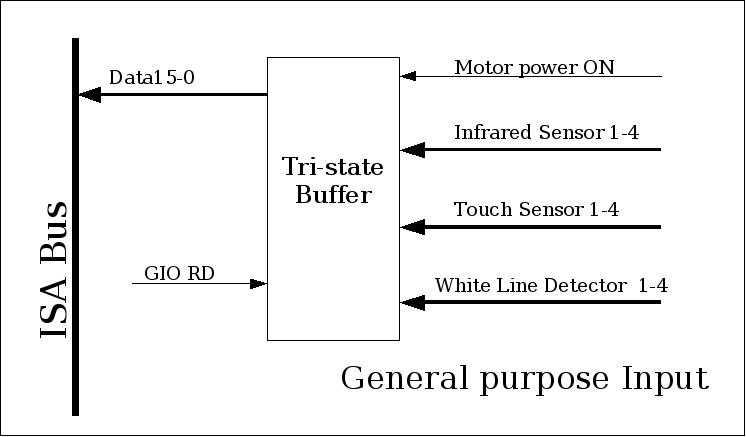
図6
モータパワーON信号、白線センサ信号、タッチセンサ信号、赤外線センサ信号 をそのアドレスのIOread時にデータバスに載せる。
6.赤外線コード検出モジュール
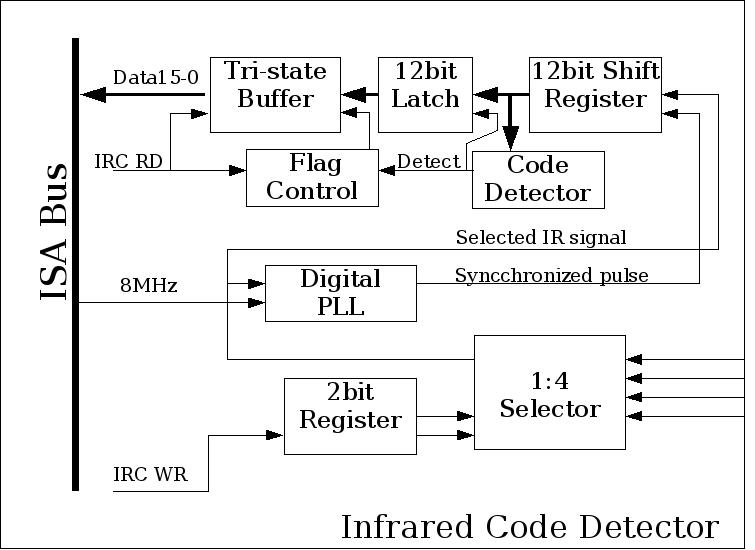
図6
選択された赤外線信号の立ち上がりを検出し、この信号でデジタルPLL回路の 同期引き込みを行う。同期信号で赤外線センサ信号をサンプルし12bitシフトレジス タに順次取り込む。コード検出器は赤外線のシフトレジスタの内容が信号パター ンに一致しているかを同期信号ごとにチェックし、信号パターンに一致したと きにその内容を12bitラッチ回路にラッチ信号を送る。同時にflagレジスタを セットする。フラグコントロール回路はフラグ保持のレジスタと、データの読 み込み時にフラグをリセットする機能を実現する。
7.カメラモジュール
PICを利用したADコンバータからはNTSC信号が8ビットのデジタル信号で送られてくる。その値を使いたいときは専用の番地を用意するので、データ取得用の番地にアクセスして8ビットのデ
−タを引き出せるようにする。また、データを得ようとした時に、その瞬間に値が変化するのは避けたいのでR/W(リード、ライト)信号のやり取りができるようにする。
図7
|
関連文書 |