- ��Ū
���ɤϥݥ��Ȥΰ��ֳ�ǧ��Ķ���ȥ����˻��Ѥ��������PIC�Ȥ����ޥ�����Ǽ����ͽ��Ǥ��뎡���Τ��ᡢPIC��Ķ���ȵ�Υ¬��������ˡ��Ĵ�����뎡

�����dz��դ����ʤ����ʤ������륤����Υޥ�������åס�
�Ȥ������ȥ�����PIC��Peripheral Interface Controller�ˤϤ���̾����ͳ��ɤ��ꡢ����ԥ塼���μ��դ���³�������յ���Ȥ���³��ʬ�����椹�뤿��˳�ȯ���줿�֥ޥ���������ȥ�����פȸƤФ���ΰ��IC�Ǥ��롣�Ĥޤꡢ����ۤɹⵡǽ����®����ɬ�פȤ��ʤ��������յ�������椹��Τ������ʵ�ǽ����¢���Ƥ���Ȥ��ä���������Ū�����Ū���Τ��ϰϤ˸¤��Ƥ���ޥ���������ԥ塼���Σ���Ǥ��롣
���Τ褦����ħ�����롣
- TTL�ǤϤ���ä����Ѥ���Z80�Τ褦�ʥޥ������Ȥ��ۤɤǤ�ʤ������Ӥ�Ĺ����ư����������Ȥ����褦�����Ӥ˺�Ŭ�ʾ����ʥ����åץޥ���������ԥ塼����
- ����������ϲ�ϩ�����ƣ��Ĥ�IC�����äƤ��������ʤ�Ρ��ä�PIC16F84�ϡ����꤬EEPROM�ʤΤǡ����٤Ǥ�ץ�������õ����������롣
- ��ȯ�ѤΥ��եȤ��ե���եȤ�����Ǥ���ROM�饤���⼫�����롣����Ǥʤ��Ƥ�����ʤ��¤�����Ǥ��롣
- ̿��������ʤ��ΤdzФ��䤹���ץ�����ߥ��פ���(35̿��)�Τǡ��ǿͤǤ�Ȥ��롣
*RISC(Reduced Instruction Set Computer)�Ľ���̿��åȥ���ԥ塼����̿�������14�ӥå�Ĺ��1ñ��(1��ɤȤ���)�Ȥ��ƹ�������Ƥ��ơ����줬�ץ����������1���ϤˤĤ�1̿��Ȥ������dz�Ǽ����Ƥ����Ύ�
��ȯ�� �ƹ�ޥ��������åץƥ��Υ�����(Microchip Technology Co.) ̾�� PIC16/17����� �ԥ�� 8�ԥ�18�ԥ�28�ԥ�40�ԥ�64�ԥ� ��� 12bit��14bit��16bit��*RISC������ԥ塼��
�����ʤ��������Ÿ��ȥ��ꥹ����ȯ���Ҥ����Ĥʤ��С�LED��ľ�ܶ�ư�Ǥ��������ϥݡ��Ȥ�ġ��˥ץ����������Ǥ��롣�ǹ�20MHz�Ȥ�����®�����Ӷ�ư��Ǥ�����������ϡ�
PIC�ˤϡ���Ū�˹�碌�ƿ�¿���μ��ब���롣�鷺��8�ԥ�ξ�����IC����ˡ��ޥ���������ԥ塼���Ȥ��Ƥε�ǽ�����̤�Ǽ�ޤäƤ����Τ��顢��¿���μ��յ�ǽ����¢�����ѥå�������40�ԥ��64�ԥ�⤢���緿�Υ����פޤ��Ѱդ���Ƥ��롣����ˤ����Υ������ƥ����㤬���̤ȤʤäƤ��뤿�ᡢ�礭��PIC�ϡ�������PIC�ξ�̸ߴ��ȤʤäƤ��ơ�Ʊ���ץ�������ư�������Ȥ�����롣
-
PIC����¢����Ƥ������ˤϴ��Ĥ��μ��ब���롣
- �ץ��������ꡡ1k���(PIC16F84�ξ��)
1000�ĤޤǤ�̿���Ȥ������ȡ�PIC�饤���ǽ��ࡣ - �쥸��������68byte(PIC16F84�ξ��)
�ѿ��Ȥ������ѤǤ������� Register File�Ȥ�����Ω�Υ��ꥢ�����ݤ���Ƥ��롣�ǡ����ΰ�����byte(8bit)ñ�̤ʤΤ����ա� - Special Register��16����
PIC���Τ�ư��⡼�ɤ���ꤹ�뤿��Υ쥸������ǡ���Ω��Register File �Ȥ����Ѱդ���Ƥ��뎡 - EEPROM�ǡ�����64byte(PIC16F84�ξ��)
�Ÿ���OFF���Ƥ�ä��ʤ�����إǡ��������롣��������ư��٤����Ȥȡ����߲�������¤�����Τǡ����̤Υץ�������ѿ��Ȥ��ƤϻȤ��ʤ����Ȥ����Ȥ��Ƥϡ��ѥ����dzФ��Ƥ���������Τ����Ǥ������ƥ������Ȼ��˥쥸�����˸ƤӽФ��ƻȤ��Ȥ����褦�ˤʤ롣 - Configration Bits
�ץ���������Υ��ɥ쥹2007H���Ϥˤ������̤ʥ���ǡ�PIC�δ���Ū�ʾ������ꤹ�롣���Υ���ϥץ�����ߥλ���������Read/Write������ʤ����������Ƥϡ��ץ�������ݸ��̵ͭ���Ÿ�ON����RESET��WatchDog Timer��̵ͭ��ȯ���Ҥμ��ࡣ
��ȯ�ѥ��ե�
-
��ȯ�ѥ��եȤώ�MPLAB���Ȥ����ե���եȤ�ޥ��������åץƥ��Υ������ҤΥۡ���ڡ����������������ɤ��뤳�Ȥ�����롣��MPLAB���ˤϥ��ǥ�����ޤޤ�Ƥ��뤷��¨������֥��ǥХå���Ǥ���Τ������Ǥ���褦������������Windows�Ķ����ѡ�

������ T40-16
������ R40-16
���濴���ȿ� 40��7kHz
��������٥� 115dBmin
���������� -64dB/V/��BARmin
�����ȿ��Ӱ� 6kHzmin
���������� 2400pF��25%
��������ˡ 16.2�ա�12.2mm
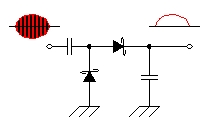
Ķ���ȥ��ϰ��Ÿ��̤Ȥ������ݤ����Ѥ������Ǥ��롣���Ÿ��̤ˤϰ��ŵ�ľ�ܸ��̤Ȱ��ŵ��ո��̤����ꡢ���ŵ�ľ�ܸ��̤ϰ����ǻҤ�Ķ���Ȥʤɤγ������ϡ���ư�Ѱ̤��ä��ȡ����ν���ü���ŵ����椬ȯ�����븽�ݤǡ�Ķ���Ȥμ��������ѽ���롣 �ޤ����ŵ��ո��̤ϡ������ǻҤ˳��������Ű���Ϳ����ȡ��ǻҤ�����Ū�Ѱ̤������븽�ݤǡ�Ķ���Ȥ����������ѽ���롣����Ū�ˤ�����Ĥθ��̤ϰ�Ĥ�Ķ���ȥ��Ǽ¸�����뤬�������Ȥȼ����ȤǤ϶����ο�ư�����ˤ������˰ۤʤꡢ�����⥤��ԡ������Ѥ����ۤ�����Ψ���褤�Τǡ��̸Ĥ����Ѥ���Τ����̤Ǥ��롣
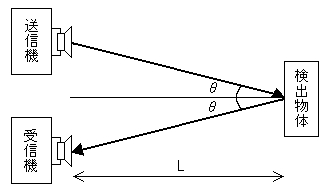 �嵭�Υ���ȤäƵ�Υ���¬�������櫓���������Τ���ˤϺ��ޤΤ褦�ʹ����ˤ��롣Ķ���Ȥ�®��v�ϲ��٤�T[��]�Ȥ����
�嵭�Υ���ȤäƵ�Υ���¬�������櫓���������Τ���ˤϺ��ޤΤ褦�ʹ����ˤ��롣Ķ���Ȥ�®��v�ϲ��٤�T[��]�Ȥ�����Ȥʤ�Τǡ�����������Ķ���Ȥ�ȯ���������о��������ȿ���Ȥ�������Ǹ��Ф���ȡ�ȿ���Ȥ��֤äƤ���ޤǤλ���t�����о�ʪ�ޤǤε�ΥL��
������뤳�Ȥ�����롣���ʤߤˡ���ĤΥ���Ȥä����ˤϿޤΤ褦�˳��٦Ȥ�����ʬ���������������뤬��L�����������礭����ЦȤ�̵��Ǥ���Τǡ�(2)���ǵ�ΥL����ޤ롣�ޤ�PIC���Ѥ��Ƶ�Υ��¬��Ԥ��Ȥ��ˤϡ�(2)���������Τ�����Ǥ��ꡢ���Τ˷����Ƥ������������Τǡ� ¬���Υ1cm������������ֳִ֤��Ȥ˼���������å����뤳�Ȥˤ���Υ���¬���롣
�Ȥ�����Ķ����®��v�ϡ�(1)������ʬ����褦�˲��٤ˤ�ä��Ѳ����Ƥ��ޤ��� v �� 340[m/sec]�ȸ��ꤷ�ƹͤ��Ƥ��ޤ��Τ��Ĥμ���������٤����ϤǤ���褦�ʲ�ϩ(���٥��������ʤ�)���Ȥ�С�(1)�����鲹�������Ԥ����Ȥ�����롣(���٤ˤ�äƲ������Ѥ������������Ԥ���ˡ�ϸ�Ҥ��롣)
���ʤߤˡ�Ķ����®�٤˰�¸���ʤ���Υ¬���Ԥ����Ȥ��ǽ�Ǥ��롣
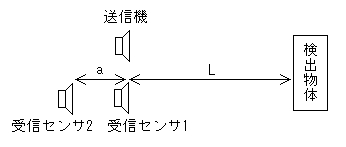 �㤨�к��ޤΤ褦��Ķ���ȼ����ѤΥ�������Ѱդ������餷�����֤��롣��Ĥμ������֤ε�Υ��a��Ķ���Ȥ�®�٤�v�Ȥ���ȡ�Ķ���Ȥ���ΥL���оݤ�ȿ�ͤ����֤äƤ���ޤǤλ��֤�
�㤨�к��ޤΤ褦��Ķ���ȼ����ѤΥ�������Ѱդ������餷�����֤��롣��Ĥμ������֤ε�Υ��a��Ķ���Ȥ�®�٤�v�Ȥ���ȡ�Ķ���Ȥ���ΥL���оݤ�ȿ�ͤ����֤äƤ���ޤǤλ��֤�
��������2 : t2 = (2L + a) / v��(4)
�Ȥʤ롣�����Ǥ���2����ϢΩ�������
�Ȥʤ롣(5)���ˤ�Ķ����®��v���ޤޤ줺���������ä�Ķ����®�٤˰�¸���ʤ���Υ¬�꤬��ǽ�Ǥ��뎡 ����������¬����ˡ�ϡ�PIC��(5)��������뤳�Ȥ������Ȥȡ��ǻҤ���;ʬ�˻Ȥ����Ȥʤɤ���ͳ���麣��ϻȤ�ʤ���
����������ϩ
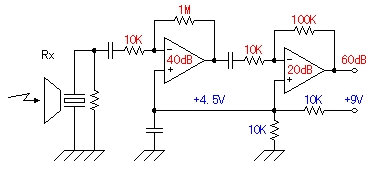 �����ѥ��Ǽ�����Ķ���ȿ���ϥ��ڥ�����������2�ʻ��Ѥ���1000�ܡ�60dB�ˤ��Ű�����������롣1���ܤ�100�ܡ�40dB�ˡ�2���ܤ�10�ܡ�20dB�ˤ������롣���ڥ���פ��̾�ץ饹�ȥޥ��ʥ��Σ��Ÿ�����Ѥ��뤬�����β�ϩ�Ǥϡ�9V��ñ�Ÿ���ư����Ƥ��롣���Τ��ᡢ���ڥ���פΥץ饹���Ϥ��Ÿ��Ű���Ⱦʬ��4.5V�ˤ��Ű���Х������Ű��Ȥ��Ʋä������������ή������濴�Ű���4.5V�ˤ��Ƥ��롣���ڥ���פ��鵢�Ԥǻ��Ѥ�����硢�ץ饹����ü�Ҥ��Ű��ȥޥ��ʥ�����ü�Ҥ��Ű����ۤ��������ʤ�Τǡ����ΥХ������Ű��ˤ���ή����Υץ饹¦�ȥޥ��ʥ�¦��������������뤳�Ȥ�����롣���ΥХ������Ű���ä��ʤ��ȸ�ή������Ĥߤ������뤳�Ȥˤʤ롣������ˡ��2�Ÿ��ѤΥ��ڥ���פ�ñ�Ÿ���ư�������ή�������������˺Τ�����ˡ�Ǥ��롣
�����ѥ��Ǽ�����Ķ���ȿ���ϥ��ڥ�����������2�ʻ��Ѥ���1000�ܡ�60dB�ˤ��Ű�����������롣1���ܤ�100�ܡ�40dB�ˡ�2���ܤ�10�ܡ�20dB�ˤ������롣���ڥ���פ��̾�ץ饹�ȥޥ��ʥ��Σ��Ÿ�����Ѥ��뤬�����β�ϩ�Ǥϡ�9V��ñ�Ÿ���ư����Ƥ��롣���Τ��ᡢ���ڥ���פΥץ饹���Ϥ��Ÿ��Ű���Ⱦʬ��4.5V�ˤ��Ű���Х������Ű��Ȥ��Ʋä������������ή������濴�Ű���4.5V�ˤ��Ƥ��롣���ڥ���פ��鵢�Ԥǻ��Ѥ�����硢�ץ饹����ü�Ҥ��Ű��ȥޥ��ʥ�����ü�Ҥ��Ű����ۤ��������ʤ�Τǡ����ΥХ������Ű��ˤ���ή����Υץ饹¦�ȥޥ��ʥ�¦��������������뤳�Ȥ�����롣���ΥХ������Ű���ä��ʤ��ȸ�ή������Ĥߤ������뤳�Ȥˤʤ롣������ˡ��2�Ÿ��ѤΥ��ڥ���פ�ñ�Ÿ���ư�������ή�������������˺Τ�����ˡ�Ǥ��롣
���Ȳ�ϩ
 ��������Ķ���ȿ���Ф��뤿��˸��Ȥ�Ԥ������β�ϩ��*����åȥ������Хꥢ�����������ɤ���Ѥ���Ⱦ����ή��ϩ�Ǥ��롣���������ɤθ�Υ���ǥ�ʿ�ꤹ�뤳�Ȥˤ�ꡢ���п���ο����٥�˱�ä�ľή�Ű������뤳�Ȥ�����롣
��������Ķ���ȿ���Ф��뤿��˸��Ȥ�Ԥ������β�ϩ��*����åȥ������Хꥢ�����������ɤ���Ѥ���Ⱦ����ή��ϩ�Ǥ��롣���������ɤθ�Υ���ǥ�ʿ�ꤹ�뤳�Ȥˤ�ꡢ���п���ο����٥�˱�ä�ľή�Ű������뤳�Ȥ�����롣
*����åȥ������Хꥢ�������������ĥ��������ɤϸ�ή��ľή����ή����Ȥ����Ѥ���뤬����ή�μ��ȿ����⤯�ʤ����ή������ʤ��ʤ롣����ϵղ���(�ꥫ�Х�)�����˴ط����뎡�ղ��������Ȥ����Τϼ��Τ褦�ʤ��ȤǤ��뎡���������ɤ˽�������ή��ή��Ƥ�����֤ǵޤ˵��������Ű�����Ȱ�ֵ���������ή��ή��Ƥ��ޤ������ε�������ή�����ή���ߤޤ�ޤǤ�(����ή�Υԡ�����10��̤ˤޤDz�����)���֤�ղ������֤Ȥ���������åȥ������Хꥢ�����������ɤϤ��εղ������֤�û�������������Ű��߲����㤤�Τǹ���Ȥ���ή��Ŭ�������������ɤǤ��뎡��������ϳ����ή��¿�����ȡ����������Ϥ��㤤���Ȥʤɤ������Ǥ��뎡
���渡�в�ϩ
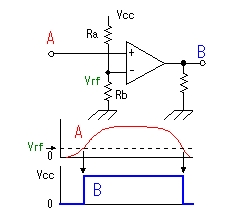 ¬���о�ʪ��ķ���֤äƤ���Ķ���Ȥθ��Ф�Ԥ���ϩ����θ��Ȳ�ϩ�ν��Ϥ��Ű���Ӵ�(����ѥ졼��)�Ǹ��Ф��롣���β�ϩ�Ǥ��Ű���Ӵ�������ñ�Ÿ��Υ��ڥ���פ���Ѥ��Ƥ��롣���ڥ���פϥץ饹���Ϥȥޥ��ʥ����Ϥκ����������ƽ��Ϥ��롣�̾索�ڥ���פ��鵢�Ԥ��ƻ��Ѥ��뤬���鵢�Ԥ��ʤ���羯���������Ű��κ��Ǥ���Ϥ�˰�¾��֤ˤʤ롣���ڥ���פ�����Ψ�ϼ���ˤ��뤬�����ܤ�����Ψ������Τǡ��ץ饹���Ϥ��ޥ��ʥ����Ϥ�꾯���Ǥ�⤯�ʤ�ȡ����κ��Ͽ����ܤ�����������ϤϤۤȤ���Ÿ��Ű���Ʊ����(˰�¾���)�ˤʤ롣�դˡ��ץ饹���Ϥ��ޥ��ʥ����Ϥ�꾯���Ǥ��㤯�ʤ�ȡ����κ��Ͽ����ܤ�����������ϤϤۤȤ��0V(OFF����)�ˤʤ롣����ư����Ű���Ӵ��ư��Τ�ΤǤ��롣����������Ū���Ű���Ӵ�ȥ��ڥ���פ������β�ϩ���㤦�Τǡ��Ű���Ӵ�ڥ���פ˻Ȥ����ȤϽ���ʤ������β�ϩ�Ǥϸ��Ȳ�ϩ�ν��Ϥ渡�в�ϩ�Υץ饹���Ϥ���³�����ޥ��ʥ����Ϥ��Ű��ϰ���ˤ��Ƥ��롣
¬���о�ʪ��ķ���֤äƤ���Ķ���Ȥθ��Ф�Ԥ���ϩ����θ��Ȳ�ϩ�ν��Ϥ��Ű���Ӵ�(����ѥ졼��)�Ǹ��Ф��롣���β�ϩ�Ǥ��Ű���Ӵ�������ñ�Ÿ��Υ��ڥ���פ���Ѥ��Ƥ��롣���ڥ���פϥץ饹���Ϥȥޥ��ʥ����Ϥκ����������ƽ��Ϥ��롣�̾索�ڥ���פ��鵢�Ԥ��ƻ��Ѥ��뤬���鵢�Ԥ��ʤ���羯���������Ű��κ��Ǥ���Ϥ�˰�¾��֤ˤʤ롣���ڥ���פ�����Ψ�ϼ���ˤ��뤬�����ܤ�����Ψ������Τǡ��ץ饹���Ϥ��ޥ��ʥ����Ϥ�꾯���Ǥ�⤯�ʤ�ȡ����κ��Ͽ����ܤ�����������ϤϤۤȤ���Ÿ��Ű���Ʊ����(˰�¾���)�ˤʤ롣�դˡ��ץ饹���Ϥ��ޥ��ʥ����Ϥ�꾯���Ǥ��㤯�ʤ�ȡ����κ��Ͽ����ܤ�����������ϤϤۤȤ��0V(OFF����)�ˤʤ롣����ư����Ű���Ӵ��ư��Τ�ΤǤ��롣����������Ū���Ű���Ӵ�ȥ��ڥ���פ������β�ϩ���㤦�Τǡ��Ű���Ӵ�ڥ���פ˻Ȥ����ȤϽ���ʤ������β�ϩ�Ǥϸ��Ȳ�ϩ�ν��Ϥ渡�в�ϩ�Υץ饹���Ϥ���³�����ޥ��ʥ����Ϥ��Ű��ϰ���ˤ��Ƥ��롣
�����顢��ή����Ķ���ȿ��椬0.4V�ʾ�ˤʤ�ȿ��渡�в�ϩ�ν��Ϥ�H��٥�ʤۤܡ�9V�ˤȤʤ롣���ν��Ϥϸ��ʤο����ݻ���ϩ������(TTL:0V��5V)�˹�碌�뤿������ʬ�����롣
�����ݻ���ϩ
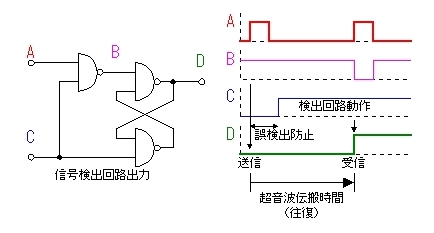 Ķ���Ȥ����Ф��Ƥ���¬���о�ʪ��ȿ�ͤ��Ƶ��äƤ���������ݻ����뤿��β�ϩ��RS(���åȎ��ꥻ�å�)�ե�åץե��åפ���Ѥ��Ƥ��롣�����ѥ륹�β����ߤˤ������Ф��ɻߤ��뤿��������ѥ륹��Ф��Ƥ���������(��1.5msec)���в�ϩ��ư��ʤ��褦�ˤ��Ƥ��롣���ξ��֤�PIC�Υ��եȤ����椹�롣
Ķ���Ȥ����Ф��Ƥ���¬���о�ʪ��ȿ�ͤ��Ƶ��äƤ���������ݻ����뤿��β�ϩ��RS(���åȎ��ꥻ�å�)�ե�åץե��åפ���Ѥ��Ƥ��롣�����ѥ륹�β����ߤˤ������Ф��ɻߤ��뤿��������ѥ륹��Ф��Ƥ���������(��1.5msec)���в�ϩ��ư��ʤ��褦�ˤ��Ƥ��롣���ξ��֤�PIC�Υ��եȤ����椹�롣
���β�ϩ��ȿ�Ϳ��渡�л���(��65msec)����˿���Ф������ɤ������ǧ���뤿��˻��Ѥ��롣����Ķ���ȥѥ륹��Ф��Ȥ��ˤ��β�ϩ�ν��Ϥ�����å�����L��٥�Ǥ����ȿ�Ϳ���ϸ��ФǤ��ʤ��ä��Ȥ��������Ф���
������ϩ
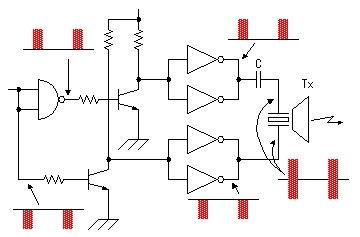 ����С�������Ѥ���Ķ���ȥ��Υɥ饤�֤�Ԥ���ϩ��2�ĤΥ���С������������³���ƽ������Ϥ�;͵��������Ƥ��롣���Υץ饹ü�Ҥȥޥ��ʥ�ü�Ҥ˲ä����Ű��ΰ����180�뤺�餷�Ƥ��롣�ޤ�������ǥˤ��ľή���åȤƤ���Τǡ����ˤϥ���С������Ϥ����ܤ��Ű����ä�뤳�Ȥˤʤꡢ�������Ķ���Ƚ��Ϥ���Ƥ��롣
����С�������Ѥ���Ķ���ȥ��Υɥ饤�֤�Ԥ���ϩ��2�ĤΥ���С������������³���ƽ������Ϥ�;͵��������Ƥ��롣���Υץ饹ü�Ҥȥޥ��ʥ�ü�Ҥ˲ä����Ű��ΰ����180�뤺�餷�Ƥ��롣�ޤ�������ǥˤ��ľή���åȤƤ���Τǡ����ˤϥ���С������Ϥ����ܤ��Ű����ä�뤳�Ȥˤʤꡢ�������Ķ���Ƚ��Ϥ���Ƥ��롣
���Υɥ饤�ֲ�ϩ�ϡ�9V���Ÿ���ư����롣PIC��ư���Ű��ʡ�5V�ˤ����椵���뤿��˥ȥ�����ˤ���Ű��Ѵ����Ƥ��롣����С����ˤ�C-MOS��ϩ��Ȥ���ON/OFF�����Ū��®�˹Ԥ��롣
���������Ű�ȯ����ϩ
 ��������Ȥ����¤���®�٤ϲ��٤ˤ���Ѳ����롣0��Ǥ�331.5m/sec��40��Ǥ�355.5m/sec�Ǥ��롣PIC��Ķ���ȵ�Υ¬���ϩ�����硢����ץ��㵡ǽ�Ȥ�����Τ��Ѥ��Ʒ�¬�������»��֤��Υ�����ͤdz�뤳�Ȥˤ���Υ����뤳�Ȥ��Ǥ��롣
��������Ȥ����¤���®�٤ϲ��٤ˤ���Ѳ����롣0��Ǥ�331.5m/sec��40��Ǥ�355.5m/sec�Ǥ��롣PIC��Ķ���ȵ�Υ¬���ϩ�����硢����ץ��㵡ǽ�Ȥ�����Τ��Ѥ��Ʒ�¬�������»��֤��Υ�����ͤdz�뤳�Ȥˤ���Υ����뤳�Ȥ��Ǥ��롣
�㤨��0��δĶ���1m�ε�Υ�ΤȤ������Ȥ�����������֤�2[m] / 331.5[m/sec] �� 0.006033[sec] �� 6.033[msec]�Ǥ��롣����ץ��㵡ǽ�Ǥ�1��sec�ǥ�������Ȥ��Ƥ���Τǡ������������Ƥ�6033�Ȥʤ롣������Υ(cm)�˴�������ˤ�60�dz�뤳�Ȥˤʤ롣6033 / 60 �� 100.55[cm]�Ǿ������ʲ����ڤ�ΤƤ��롣�����ڼΤ�ʬ�������Ȥʤ롣���δ�����(60)�ϲ��٤ˤ�äƷ�ޤꡢ��¬�����Υ�ˤϴط����ʤ���9m�ξ��ˤϥ�����54298��60�dz���904.9cm�Ǥ��롣�Ĥޤꡢ��Υ��Ĺ���ʤ�ȴ����������礭���ʤ뤳�Ȥˤʤ롣����Ͼ������ʲ��δ���������ʤ�����Ǥ��롣40��ξ���2[m] / 355.5[m/sec] �� 5625[��sec]�Ǵ����ͤ�56�����Τ��Ȥ��顢���ϲ��٤ˤ�괹���ͤ��ѹ����Ʒ�¬����ɬ�פ����뤳�Ȥ��狼�롣
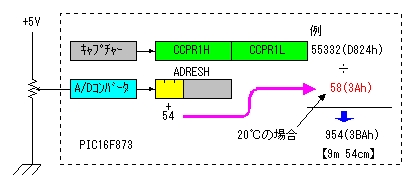
���β�ϩ�ϲ�������Ű����Ѳ�������A/D�Ѵ��ƴ����ͤȤ��ƻ��Ѥ��롣A/D�Ѵ��Ǥ������Ű���10bit�Υǥ�����ǡ������Ѵ����롣���β�ϩ��10bit�Τ������3bit��ȤäƤ��롣�Ĥޤꡢ0V����5V�����Ϥ�A/D�Ѵ������0����7�ޤǤ��ͤ������뤳�Ȥˤʤ롣�����54��ä��ƴ����ͤȤ���ȡ������ͤ�54����61�ޤ��Ѳ������뤳�Ȥ�����뎡
1cm�Ե��ץ������
-
Ķ���Ȥ�����®�٤ϡ�(1)���Ǽ������褦�ˡ�v[m/sec] �� 331.5 + 0.6T��ɽ����롣���μ���ꡢĶ���Ȥ�1cm����оݤ�ȿ�ͤ����֤äƤ���ޤǤˤ��������t1cm�ϡ����٤�T[��]�Ȥ����
��ɽ����롣�����Ǿ弰��ޥ��������Ÿ�����ƣ����ʹߤι��̵�뤹���
�Ȥʤ롣PIC��10MHz��ư�����Ȥ���ȡ�PIC�Ǥ�4�����å���1step�¹Ԥ����Τǡ�1step�ˤ�������֤�0.4��sec�Ǥ���������(8)���ƥå����Ѵ������
�Ȥʤ롣�ʾ�Τ��Ȥ��顢(9)����ɽ����륹�ƥåײ��ʬ���롼�פ�ޤ魯���Ȥˤ�ꡢ��¬���Υ1cmʬ���Ե����֎�����뤳�Ȥ�ʬ���롣���������ºݤˤϥ��ƥå��������Ǥʤ���Фʤ�ʤ��������ǡ�151���ƥåפ����ݻᲹ�٤�10�ΰ̤�3�ܤ���������ƥå���Ķ���ȼ��������å��δ֤ˤϤ��ߡ�Ķ����®�٤��б������Ե����֤�¸����롣
Ķ���������ץ������
-
Ķ���Ȥ��������뤿��ˤϡ�������Ķ���ȥ�����³���줿�ݡ��Ȥ�ON/OFF����Ф褤�����Ѥ���Ķ���ȥ��ζ������ȿ���40kHz�ʤΤǡ����μ��ȿ��ǥݡ��Ȥ� ON/OFF��Ԥ���1 / (40 * 1000) = 25[��sec]�ʤΤǡ�ON�����OFF���Ƥ�����ֳִ֤�25��sec��Ⱦʬ��12.5��sec �Ȥʤ롣
�����֤��β���ϡ���������¿�������ۤ���ȯ�������Ķ���ȤΥѥ���礭���ʤꡢ���Υ��¬�꤬��ǽ�ˤʤ롣�����������֤���¿�������Ķ���Ȥ�ȯ���ˤ�������֤�Ĺ���ʤꡢ���Υ��¬�꤬����ʤ��ʤ롣���Υ��¬��ϸ������礭���ʤ�Τ��������ɤ�MIRS�ϥݥ��ȳ�ǧ�����Υ�ǽ��褿�ۤ���ͭ���ʤΤǡ��������礭���Ƥ���Υ��¬�꤬�Ǥ���褦�ˎ������֤�����ʤ����ꤹ�뎡�㤨��12������ꤷ���Ȥ���Ķ���Ȥ����������10cm�ʤ�Τǡ�¬��Ǥ����û��Υ��10cm��Ⱦʬ(�������뤫��)��5cm�Ȥʤ롣
��Υ��¬�ץ������
-
��Υ��¬��Ԥ�����ˡ� Ķ���Ȥ��������Ƥ���¬���Υ1cm�ֳ֤�Ķ���Ȥμ���������å����롣ȿ���Ȥ����������������ȡ������Ѳ�ϩ�ˤ����Ϥ��ǥ������̤��Ѵ������Τǡ�������ϩ����³���줿PIC�Υݡ��Ȥ�H��٥�ˤʤ롣���äƤ��Υݡ��Ȥ�ON�ˤʤ�ޤǼ��������å����֤��Ф褤���Ȥˤʤ롣���������о�ʪ�Τ������ꡢĶ���Ȥ�ۼ����Ƥ��ޤ��褦��ʪ�ΤǤ��ä���硢Ķ���Ȥ��������Ƥ�ȿ���ȤФ��뤳�Ȥ�����ʤ������ΤȤ��˼��������å��롼����̵�¥롼�פ˴٤�ʤ��褦�ˡ�¬��Ǥ���³���Υ�����ꤷ���³���Υʬ�ʾ�λ��֤��ФäƤ�ȿ���ȤФǤ��ʤ���и����ԲĤȤ��Ƶ�Υ��¬��λ���롣