| 沼津高専 電子制御工学科 | |||||||
|
|||||||
| 改訂記録 | |||||||
|---|---|---|---|---|---|---|---|
| 版数 | 作成日 | 作成者 | 承認 | 改訂内容 | 提出先 | ||
| A01 | 2002.12.15 | 温水 | 初版 | MIRS0204 | |||
1. ロータリエンコーダは…
タイヤの回転数(アナログ量)をパルス数(デジタル量)に変換する機能を持っている。
回転軸の回転速度に比例した,互いに90°位相の異なる2相の近似正弦波を出力しているもので、
2相の位相関係から回転方向が判別できる。
他に、2相の信号をカウントして回転数を求めることもできる。
一般的な使用法は回転子の回転数の検出・速度の検出である。
MIRSでは光電式(光学式のロータリエンコーダ)を使用する。このロータリエンコーダ部は大きく分けて
マイクロエンコーダとロータリエンコーダモジュールの二つの部分から構成されている。
その二つを組み合わせる事によりアナログ量であるモータの回転数をディジタル量でカウントしている。
*マイクロエンコーダ…モータの回転数を90°位相がずれた変換させる矩形波に変換させる
*ロータリエンコーダモジュール…FPGA内に構成され、モータの回転数をカウントする
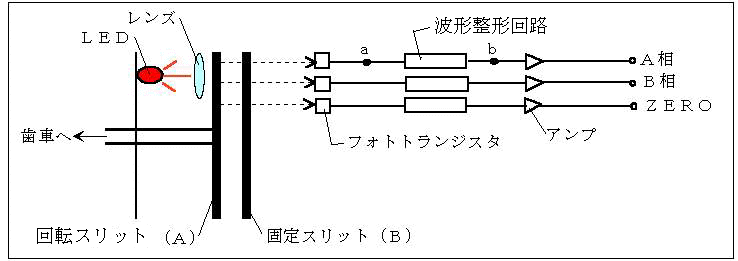
2. 光電式ロータリーエンコーダの概要
2.1 回転量の検出
発光ダイオード(LED)と受光素子(フォトトランジスタ)が、回転軸に取り付けられた回転スリット(A)と
固定スリット(B)をはさみ相対して取り付けられている。
回転スリット(A)が回転すると、ダイオードの光がスリットによって通過、遮断を繰り返す。
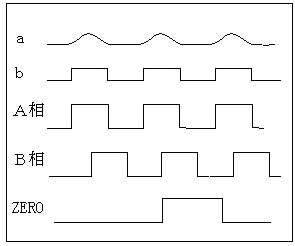
この光を受光素子により検出して、信号(パルス)に変換する。出力信号を2相にするため、
固定スリット(B)のスリットは2つで、90°位相がずれている。(図1・図2参照)
― 図1 ―
― 図2 ―
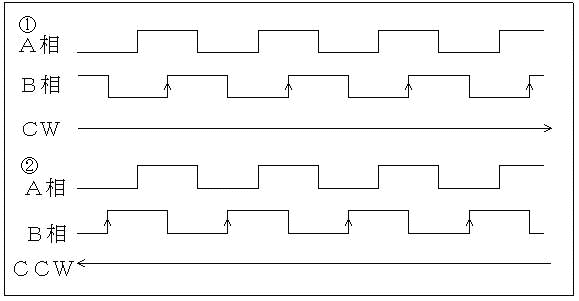
2.2 回転方向(正・逆)の判別
― 図3 ―
図3において出力信号A,Bの位相差は常に90°であるが、回転方向により、ずれ方が異なってくる。
①の場合、B信号の立ち上がり時にA信号は必ず”H”になっているため回転方向検出信号は”H”になる。
②の場合、B信号の立ち上がり時にA信号は”L”になっているため、回転方向検出信号は”L”になる。
このようにして回転方向の判別を行う事ができる。
(*パルス弁別回路…2相パルス出力型のエンコーダ正転/逆転を検出するために必要な回路。
*カウンタ回路…ロータリエンコーダの信号をカウントし、2相の信号の位相差から回転方向を判断する回路。)
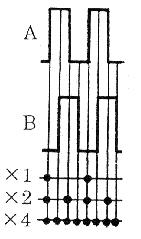
2.3 回転数のカウント
パルスのカウント法は、1,2,4逓倍の数え方がある。MIRSではA相、B相が0のときに
どちらが立ち上るかを判別している。1逓倍を使っている。
― 図4 ―
MIRS標準のマイクロエンコーダでは1回転するのに100パルス発生する。2.4 回転速度の検出
A、Bの周波数は回転数に比例するからBのパルスを一定時間毎にカウントし回転数をデータ化する。
データの読み込みはタイマー割り込みを使い、そのたびにカウンタはリセットされる
3. MIRSで使用するマイクロエンコーダの仕様
| 供給電圧 | 5V(-10/+10%) |
| 出力信号 | TTLコンパチブル |
| 立ち上がり時間 | 200ns |
| 下降時間 | 50ns |
| チャンネル数 | 2 |
| カウント/回転 | 100 |
| 使用温度範囲 | -20/+85℃ |
| コード・ホイール慣性モーメント | =<0.05gcm2 |
| 最大加速度 | 250000rad/s2 |
| 最大出力電流/チャンネル | 5mA |
| 位相差 | 90°e(-45/+45°e) |
| 最大周波数 | 20kHz |
4. その他
MIRS競技で指定されている物以外のロータリエンコーダについて調査したところ、指定されている物より
1.2倍から最大12倍の精度を得る事ができる物をいくつか見つけました。当然のことながら、
精度が良くなるにつれて価格も上がるのでMIRSを製作する上でどの程度の゛正確さ゛が
必要なのかを話し合った後決めたほうが良いと思います。