- �͂��߂�
�{�h�L�������g�́AMIRS0102��{�v��(MIRS0102-DSGN-1001)�ɋK�肳�ꂽ �V�X�e���̓���K��A��ԑJ�ڂ���������e�^�X�N�̊J���i�R�[�f�B���O�A�������j�ɕK�v�Ȏ������q�ׂ�B
- �T�v
MIRS2000 �\�t�g�E�F�A�́ART-Linux ��œ��삷��v���O�����Q�ō\�������B �v���O�����́ALinux �̕W���� API �ƂƂ��ɁA�s�����[�h�ɑΉ������v���O�����A��̋@�\���̃v���O�����Q�Œ���@�\���W���[���A����сART�^�X�N�A�h���C�o�ƁA�⏕���ƓƎ��ɒ�`�����w�b�_�t�@�C������\�������B
�{ MIRS �ł́A�s�����[�h�ɑΉ���������9�̃��[�h���W���[����3�̃��[�h�⏕���W���[����p�ӂ���B IO ����́A�����g����Ƌ쓮�n�̐���A�����T�m�Z���T�� RT �^�X�N�Ƃ��ċ쓮�����A �ԊO���M�����͒T�m�ƁALCD �o�͂́A�f�o�C�X�h���C�o��p���čs���B �f�o�C�X�h���C�o�́A�W�� API �̃f�o�C�X�h���C�o�𗘗p����B
- OS�iRT-Linux�j�̊T�v
OS�iRT-Linux�j�̊T�v�ɂ��Ă͉��L�̒������ցB
- �s�����[�h�̏ڍ�
- �ҋ@���[�h
- ��`�@�@�@�F���C���v���O�����𗧂��グ�āA�X�^�[�g�X�C�b�`���������܂ł̑ҋ@��Ԃɓ���B
- �J�ڏ����F�d���X�C�b�`�������B
- �������샂�[�h
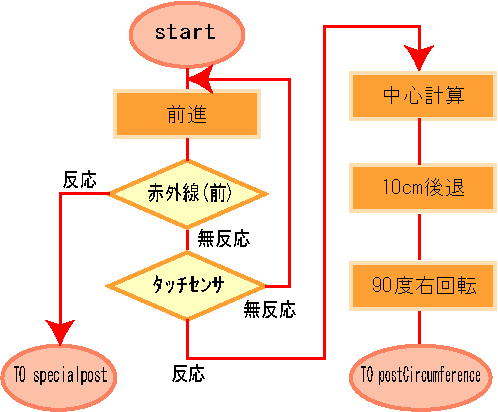
- ��`�@�@�@�F�X�^�[�g�ʒu���獶�ւX�O�x��]���O�i�A���������m�����Ƃ���łƂ܂�P�Ocm��ނ��E�X�O�x��]�A��ނ����������m�����Ƃ���Ŏ~�܂�A���̒n�_���i�O�C�O�j�Ƃ���B
- �J�ڏ����F�ҋ@���[�h�ŃX�^�[�g�X�C�b�`�����邱�ƁB
- �|�X�g�T�����[�h
- ��`�@�@�@�F�����ɉ����ċ��Z������v���ɐi�s���Ȃ���MIRS�����ɐݒu���������g�����Z���T�ɂ��A�|�X�g�̒T�����s���B�|�X�g�������炻�̃|�X�g�̈ʒu���L������B�i�L������̂͒����g�Z���T�ő�����MIRS����|�X�g�܂ł̋����ƃ��[�^���[�G���R�[�_�̒l�B�j
- �J�ڏ����F�������샂�[�h���|�X�g�T�����[�h�@�@�|�X�g�T�����[�g���A���[�h���|�X�g�T�����[�h
- ��`�@�@�@�F�����ɉ����ċ��Z������v���ɐi�s���Ȃ���MIRS�����ɐݒu���������g�����Z���T�ɂ��A�|�X�g�̒T�����s���B�|�X�g�������炻�̃|�X�g�̈ʒu���L������B�i�L������̂͒����g�Z���T�ő�����MIRS����|�X�g�܂ł̋����ƃ��[�^���[�G���R�[�_�̒l�B�j
- �|�X�g�ڋ߃��[�h
- ��`�@�@�@�F�|�X�g�ւƒ��i�ڋ߂���B���̎�MIRS�O�ʂɐݒu�����ԊO���Z���T�����������ꍇ�A���ʃ��[�h�ֈڂ�B�����łȂ���ΑO�ʕ��^�b�`�Z���T���Ԃ���܂Œ��i�A���̌�|�X�g�̒��S�������Ă���10cm��ނ����Ƃ���Ń|�X�g�l�����[�h�֑J�ڂ���B
- �J�ڏ����F�|�X�g�T�����[�h�Œ����g���Z���T������
- �|�X�g�l�����[�h
- ��`�@�@�@�F�܂��E��90����]�B�|�X�g���v���Ɏ���B �����āAMIRS�����ɐݒu�����ԊO���Z���T�ɂ��X�C�b�`�̒T�����s���B���̌㔭�������X�C�b�`���l�����ׂ��ԍ��ł���Ίl������B�l��������A���n�߂��n�_�֖߂�B�@
- �J�ڏ����F�|�X�g�ڋ߃��[�h�őO���̃^�b�`�Z���T�����������ꍇ
- ���ʃ��[�h
- ��`�@�@�@�F�|�X�g�ڋ߃��[�h�Ń|�X�g�ڋߒ��ɐԊO�������m�����ꍇ�ɁA���̐ԊO���̔ԍ���F������B���̔ԍ����l�����ׂ��ԍ��ł���|�X�g���l���B�����łȂ�����[�g�֖߂�B
- �J�ڏ����F�|�X�g�ڋ߃��[�h���ɑO���̐ԊO���Z���T�����������Ƃ�
- �|�X�g�T�����[�g���A���ʃ��[�h
- ��`�@�@�@�F�|�X�g���l��������A�|�X�g�T�����[�g�ւƈړ�����B
- �J�ڏ����F�|�X�g�l�����[�h����
- �|�X�g�ʒu�ړ����[�h
- ��`�@�@�@�F�Ō�̈ړ����[�h�B�ʒu���f���[�h�ɂ���Ĕ��f���ꂽ���Ɏ��ׂ��|�X�g�̈ʒu�܂ňړ�����B���̂Ƃ��̓������Ɋi�[����Ă���|�X�g�̈ʒu�ƒ����g�Z���T�Ɨ����g���Ĉړ�����B
- �J�ڏ����F����ڂɓ�������B
- ��������
- ��`�@�@�@�F�������s�p�̃��[�h�Ŋe�펎�����s�����́B�������e�̓V�X�e�������d�l���ɂ��B
- �J�ڏ����F
- �ҋ@���[�h
- �v���O�����Q�̍\��
MIRS0102�̃v���O�����\�����ȉ��̐}�Ɏ����B
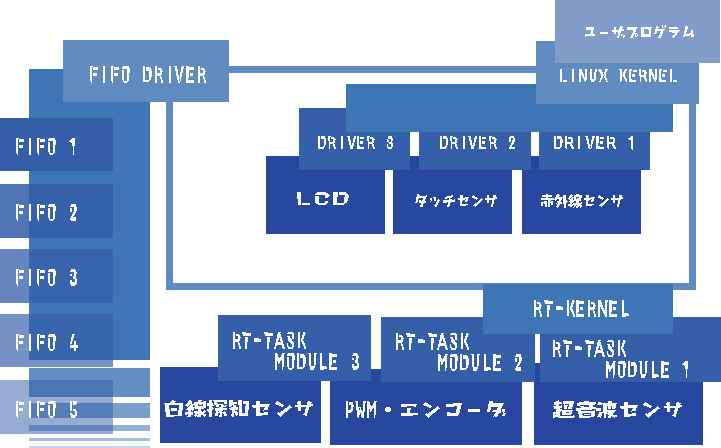
fig. �S�̍\���} - �v���O�����Q�̏ڍ�
- ���[�h���W���[��
- �������샂�[�h
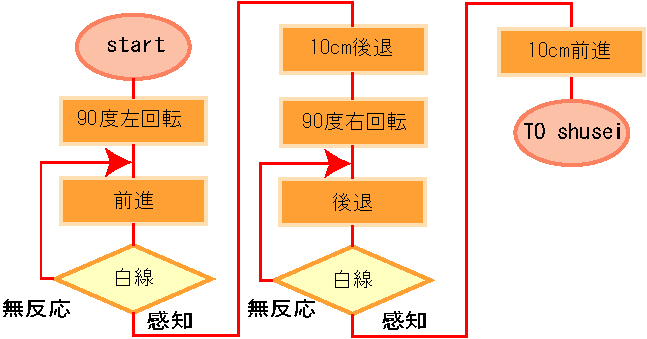
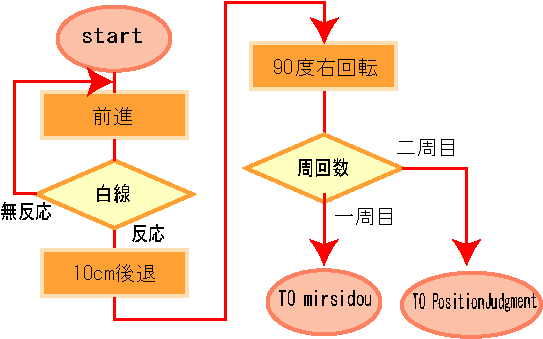
- ��`�@�@�@�F�X�^�[�g��90������]���A�����܂őO�i�B���̌�10������ނ��A90���E��]�B�����܂Ō�i������A10�����O�i����B
- �J�ڏ����F�ʒu�C�����W���[���֑J��B
- �\���v�f�F
�o�v�l�E���[�^���[�G���R�[�_RT-�^�X�N���W���[��
�k�b�c�f�o�C�X�h���C�o
�����T�mRT-�^�X�N���W���[��
- ���� :void shoki()
- �����F�Ȃ�
- �߂�l�F�Ȃ�
- �A���S���Y���i�t���[�`���[�g�j
- �ʒu�C�����[�h
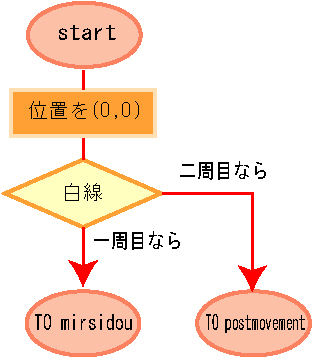
- ��`�@�@�@�F���݈ʒu���i�O�C�O�j�ƏC������B
- �J�ڏ����F��T�ڂȂ璼���ړ����[�h�ցA��T�ڂȂ�|�X�g�ʒu�ړ����[�h�֑J��B
- �\���v�f�F
�o�v�l�E���[�^���[�G���R�[�_RT-�^�X�N���W���[��
�����T�mRT-�^�X�N���W���[�� - ���� :void shusei()
- �����F�Ȃ�
- �߂�l�F�Ȃ�
- �A���S���Y���i�t���[�`���[�g�j
- �����ړ����[�h
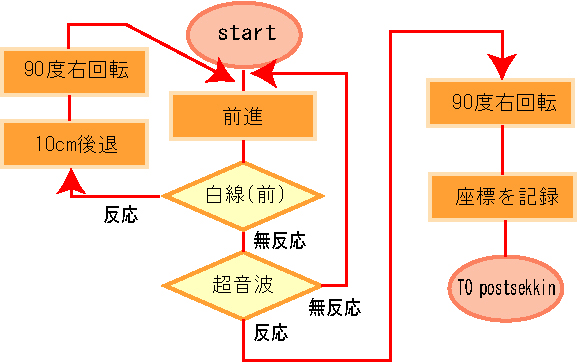
- ��`�@�@�@�F�����ɉ����ċ��Z������v���ɐi�s���Ȃ���MIRS����(�E����)�ɐݒu���������g����Z���T�ɂ��A�|�X�g�̒T�����s���B�|�X�g�������炻�̃|�X�g�̈ʒu���L������B�i�L������̂͒����g�Z���T�ő�����MIRS����|�X�g�܂ł̋����ƃ��[�^���[�G���R�[�_�̒l�B�j
- �J�ڏ����F�����g�Z���T�Ń|�X�g���L��������|�X�g�ڋ߃��[�h�ցB
- �\���v�f�F
�����g�Z���TRT-�^�X�N���W���[��
�o�v�l�E���[�^���[�G���R�[�_RT-�^�X�N���W���[��
�k�b�c�f�o�C�X�h���C�o
�����T�mRT-�^�X�N���W���[�� - ���� :void mirsidou()
- �����F�Ȃ�
- �߂�l�F�Ȃ�
- �A���S���Y���i�t���[�`���[�g�j
- ��`�@�@�@�F�����ɉ����ċ��Z������v���ɐi�s���Ȃ���MIRS����(�E����)�ɐݒu���������g����Z���T�ɂ��A�|�X�g�̒T�����s���B�|�X�g�������炻�̃|�X�g�̈ʒu���L������B�i�L������̂͒����g�Z���T�ő�����MIRS����|�X�g�܂ł̋����ƃ��[�^���[�G���R�[�_�̒l�B�j
- �|�X�g�ڋ߃��[�h
- ��`�@�@�@�F�|�X�g�ւƒ��i�A�ڋ߂��A�O�ʕ��^�b�`�Z���T����������܂őO�i����B���̌㒆�S�Ă���10������i�A90���E��]�B
���i����r���ŐԊO������M������|�X�g�ڋߓ��ʃ��W���[���ւƑJ��B - �J�ڏ����F�ԊO���Z���T������������|�X�g�ڋߓ��ʃ��[�h�ցA�^�b�`�Z���T������������|�X�g���[�h�ցB
- �\���v�f�F
�ԊO���f�o�C�X�h���C�o
�^�b�`�Z���T�f�o�C�X�h���C�o
�����g�Z���TRT-�^�X�N���W���[��
�o�v�l�E���[�^���[�G���R�[�_RT-�^�X�N���W���[��
�k�b�c�f�o�C�X�h���C�o - ���� :void postsekkin()
- �����F�Ȃ�
- �߂�l�Fsekigaisen(�O���̐ԊO���Z���T�������������ǂ���)
- �A���S���Y���i�t���[�`���[�g�j
- ��`�@�@�@�F�|�X�g�ւƒ��i�A�ڋ߂��A�O�ʕ��^�b�`�Z���T����������܂őO�i����B���̌㒆�S�Ă���10������i�A90���E��]�B
- �|�X�g�ڋߓ��ʃ��[�h
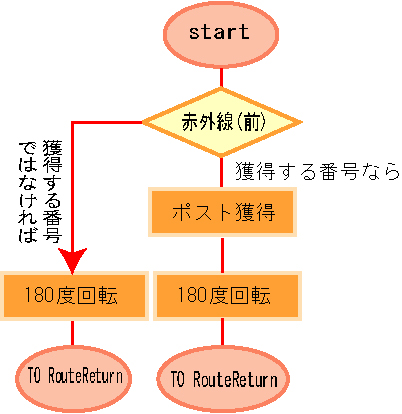
- ��`�@�@�@�F�ԊO���Z���T����M�����ԍ���F�����A���̔ԍ����l�����ׂ��ԍ��Ȃ�l�����Ă��烋�[�g���A�B�����łȂ�����̂܂܃��[�g���A���[�h�֑J��B
- �J�ڏ����F�|�X�g�̔ԍ����Ƃ�ׂ��ԍ��ł���|�X�g���[�h�ցB
�Ⴄ�ԍ��ł�����[�g���A���[�h�ցB - �\���v�f�F
�ԊO���f�o�C�X�h���C�o
�^�b�`�Z���T�f�o�C�X�h���C�o
�o�v�l�E���[�^���[�G���R�[�_RT-�^�X�N���W���[��
�k�b�c�f�o�C�X�h���C�o - ���� :void specialpost()
- �����F�Ȃ�
- �߂�l�Fpostget(0)�`(4)(�|�X�g�����ʂ��A�ǂ̃|�X�g���ǂ��ɂ��邩���L���A����Ɋl���������ǂ������l�Ƃ��ĕԂ�)
- �A���S���Y���i�t���[�`���[�g�j
- �|�X�g���[�h
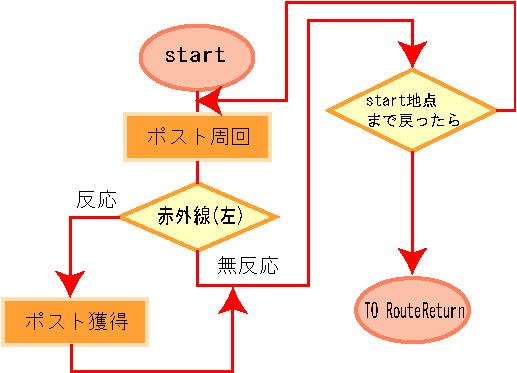
- ��`�@�@�F���̋�����ۂ��Ȃ���A�|�X�g�̎��������B���̊ԂɐԊO�������m������ԍ������ʁB�Ƃ�ׂ��ԍ��ł���Ίl������B��]���n�߂��ꏊ�A���Ă�����90���E��]���A���[�g���A���W���[���ֈڍs����B
- �J�ڏ����F���[�g���A���[�h��
- �\���v�f�F
�ԊO���f�o�C�X�h���C�o
�^�b�`�Z���T�f�o�C�X�h���C�o
�����g�Z���TRT-�^�X�N���W���[��
�o�v�l�E���[�^���[�G���R�[�_RT-�^�X�N���W���[��
�k�b�c�f�o�C�X�h���C�o - ���� :void postCircumference()
- �����F�Ȃ�
- �߂�l�Fpostget(0)�`(4)(�|�X�g�����ʂ��A�ǂ̃|�X�g���ǂ��ɂ��邩���L���A����Ɋl���������ǂ������l�Ƃ��ĕԂ�)
- �A���S���Y���i�t���[�`���[�g�j
- ���[�g���A���[�h
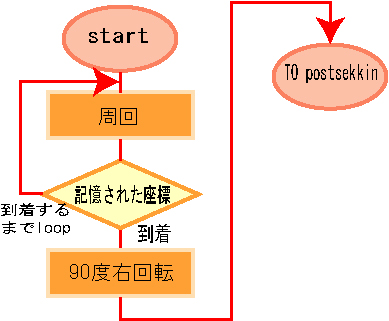
- ��`�@�@�F�|�X�g��蔒���Ɍ������Ē��i�B���������m������10������i�A90���E��]����B
- �J�ڏ����F��T�ڂȂ璼���ړ����[�h�ցA��T�ڂȂ�|�X�g�ʒu�ړ����[�h�ցB
- �\���v�f�F
�o�v�l�E���[�^���[�G���R�[�_RT-�^�X�N���W���[��
�k�b�c�f�o�C�X�h���C�o
�����T�m�f�o�C�X�h���C�o - ���� :void RouteReturn()
- �����F�Ȃ�
- �߂�l�F�Ȃ�
- �A���S���Y���i�t���[�`���[�g�j
- �|�X�g�ʒu���f���[�h
- ��`�@�@�F����MIRS���l�����ׂ��|�X�g�̈ʒu�f���A���Z������E��肷�邩����肷�邩�����肷��B
- �J�ڏ����F�|�X�g�ʒu�ړ����[�h��
- �\���v�f�F
- ���� :void PositionJudgment()
- �����F�Ȃ�
- �߂�l�Fdirection(�����ƉE���̂ǂ��炩�Ŕ��f�����㍶�Ȃ�0�A�E�Ȃ�1�̒l��Ԃ��B)
- �A���S���Y���i�t���[�`���[�g�j
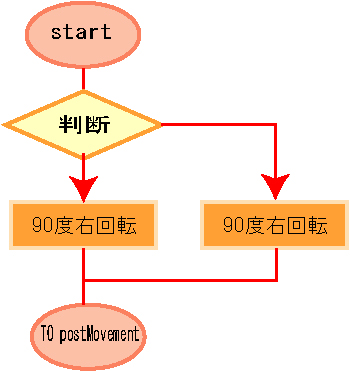
- �|�X�g�ʒu�ړ����[�h
- ��`�@�@�F�ʒu���f���[�h�Ŕ��f���ꂽ�|�X�g�܂ŁA�r�������ɉ��������[�g�ňړ�����B
- �J�ڏ����F�L�����ꂽ�|�X�g�̈ʒu�܂ł�����|�X�g�ڋ߃��[�h�ցB
- �\���v�f�F
�����g�Z���TRT-�^�X�N���W���[��
�o�v�l�E���[�^���[�G���R�[�_RT-�^�X�N���W���[��
�k�b�c�f�o�C�X�h���C�o
�����T�m�f�o�C�X�h���C�o - ���� :void postMovement()
- �����F�Ȃ�
- �߂�l�F�Ȃ�
- �A���S���Y���i�t���[�`���[�g�j
- �������샂�[�h
- �@�\���W���[��
- ��(�E)90����]���W���[��
- ��`�@�@�F���E90����]����B
- �\���v�f�F
�o�v�l�E���[�^���[�G���R�[�_RT-�^�X�N���W���[��
�k�b�c�f�o�C�X�h���C�o
- ���� :void 90_right()�Avoid 90_left()
- �����F�Ȃ�
- �߂�l�F�Ȃ�
- �O�㒼�i���W���[��
- ��`�@�@�F�w�肵������(mm)�����O�i(���)������B
- �\���v�f�F
�o�v�l�E���[�^���[�G���R�[�_RT-�^�X�N���W���[��
�k�b�c�f�o�C�X�h���C�o
- ���� :void front_move()�Avoid back_move()
- �����F�Ȃ�
- �߂�l�F�Ȃ�
- ����i���W���[��
- ��`�@�@�F�w�肵������(mm)�����O�i(���)������B���̂Ƃ�MIRS�̉E���ɂ��Ă��郉�C���g���[�X�p�̔����Z���T�����m���Ȃ���MIRS���^�����ɑ����悤�ɕ������B����ɂR�p�Ԋu�Ŕ����Z���T�����A�E�͔��A���͍�����Ɋ��m���Ă����Ԃ�ۂB�����ǂ��炩������Ƃ͈Ⴄ�f�[�^�����m������AMIRS�͐i�s���������̊��m���������Z���T�̕����֔����ɌX����B�������Ă�����MIRS�͔�����E�����ɑO�i�A��ނ����邱�Ƃ��ł���B
- �\���v�f�F
�o�v�l�E���[�^���[�G���R�[�_RT-�^�X�N���W���[��
�k�b�c�f�o�C�X�h���C�o
- ���� :void front_move()�Avoid back_move()
- �����F�Ȃ�
- �߂�l�F�Ȃ�
- ��O�h�~���[�h
- ��`�@�@�F�����ɉ����Ē��i���ɔ����Z���T������������A10������i���Ē�������B
- �\���v�f�F
�o�v�l�E���[�^���[�G���R�[�_RT-�^�X�N���W���[��
�����T�m�f�o�C�X�h���C�o
- ���� :void OutPrevention()
- �����F�Ȃ�
- �߂�l�F�Ȃ�
- ��(�E)90����]���W���[��
- RT �^�X�N���W���[��
- �����g�Z���TRT-�^�X�N���W���[���iMIRS�W��API���g�p�j
- �@�\:�e�h�e�n�P�A�e�h�e�n�Q��p���ď�ʃv���O�����ƃR�}���h�A�f�[�^�̂������s���A�����g�Z���T�𐧌䂷��B
- ����RT�^�X�N���W���[��������郂�[�h�E�@�\���W���[���F
�����ړ����[�h
�|�X�g�ڋ߃��[�h
�|�X�g���[�h
�|�X�g�ʒu�ړ����[�h
- �\���v�f�F�����W���[��
- �������A�D��x�AFIFO �̎d�l�A�A���S���Y���ɂ��Ă̓����N��Q�ƁB
- �o�v�l�E���[�^���[�G���R�[�_RT-�^�X�N���W���[���iMIRS�W��API���g�p�j
- �@�\�F���E�̃��[�^���[�G���R�[�_�̃J�E���g�l�A���x�f�[�^�A�Ȃǂ�����肷��B���i�A��]����������B
- ����RT�^�X�N���W���[��������郂�[�h�E�@�\���W���[���F
�������샂�[�h
�ʒu�C�����[�h
�����ړ����[�h
�|�X�g�ڋ߃��[�h
�|�X�g�ڋߓ��ʃ��[�h
�|�X�g���[�h
�����[�g���A���[�h
�|�X�g�ʒu�ړ����[�h
- �\���v�f�F�����W���[��
- �������A�D��x�AFIFO �̎d�l�A�A���S���Y���ɂ��Ă̓����N��Q�ƁB
- �����T�m�Z���TRT-�^�X�N���W���[���iMIRS�W��API���g�p�j
- �@�\�FMIRS�̉����ɑ������AMIRS�������̏�ɂ��邩�ǂ�������ɊĎ�����B
- ����RT�^�X�N���W���[��������郂�[�h�E�@�\���W���[���F
�������샂�[�h
�ʒu�C�����[�h
�����ړ����[�h
���[�g���A���[�h
�|�X�g�ʒu�ړ����[�h
- �\���v�f�F�����W���[��
- �������A�D��x�AFIFO �̎d�l�A�A���S���Y���ɂ��Ă̓����N��Q�ƁB
- �����g�Z���TRT-�^�X�N���W���[���iMIRS�W��API���g�p�j
- �f�o�C�X�h���C�o
- �k�b�c�f�o�C�X�h���C�o�iMIRS�W��API���g�p�j
- �@�\�FMIRS0102�ɓ��ڂ����LCD(SC1602BS)�ւ̕\�����s���B
- ���̃h���C�o�g�p����郂�[�h�E���W���[���F
���ׂẴ��[�h���W���[���B - IO �A�h���X�F0100H�A0102H
- ���A���S���Y���E�����ɂ��Ă̓����N��Q�ƁB
- �ԊO���A�^�b�`�Z���T�f�o�C�X�h���C�o
- �@�\�FMIRS0102�ɓ��ڂ����^�b�`�Z���T�A�ԊO���Z���T�A�p���[�I���M����ON/OFF�ׂ�B
- ���̃h���C�o���g�p����郂�[�h�E���W���[���F
�|�X�g�ڋ߃��[�h���^�b�`�Z���T�E�ԊO���f�o�C�X�h���C�o
�|�X�g�ڋߓ��ʃ��[�h���^�b�`�Z���T�E�ԊO���f�o�C�X�h���C�o
�|�X�g���[�h���ԊO���E�^�b�`�Z���T
- IO
�A�h���X�F
�^�b�`�Z���T��0140H�A0142H
�ԊO���Z���T��0150H�A0152H�A0154H�A0156H�A0158H- ���A���S���Y���E�����ɂ��Ă̓����N��Q�ƁB
- �k�b�c�f�o�C�X�h���C�o�iMIRS�W��API���g�p�j
- ����
- ���[�h�A�@�\���W���[���P�̎���
- �e���[�h���W���[����P�̂ŌĂяo�����[�h�̓�����\���ɉʂ���������������B
- �@�\���W���[�������̒�߂�ꂽ�@�\�𐳊m�Ɏ����ł��邩��������B
- �W��MIRS��ł̎���
- MIRS0102�͕W��MIRS�����Z���T�������Ȃ��A�܂�LCD�ƐԊO����^�b�`�Z���T�̃f�o�C�X�h���C�o����ђ����g�Z���T��PWM/���[�^���[�G���R�[�_��RT-�^�X�N���W���[����MIRS�W��API���g�p���邽�߃\�t�g�E�F�A�I�ɂقڊ��S�Ɍ݊�����B�]����MIRS0102�̃n�[�h����������O�ɂ����C���v���O���������s���A�����I�ȃe�X�g���s�����Ƃ��ł���B
- ���@��ł̎���
- ���i�A��]�A���g���[�X�̊e�@�\���W���[���̒����͎��@�ōs���B
- ���ۂɑ��s���d�ˁA�v���O���������肳���\�t�g�E�F�A�I�ȐM���x�����߂�B
- ���[�h�A�@�\���W���[���P�̎���
- ���[�h���W���[��
| �֘A���� |
|---|
- MIRS2000��{�v���쐬�v�j(MIRS00SF-CURR-0009)
- MIRS2000�\�X�g�E�F�A�ڍאv���쐬�K��(MIRS00SF-CURR-0012)
- MIRS0102��{�v��(MIRS0102-DSGN-0002)
- MIRSATLM �����g�Z���T�E���A���^�C���^�X�N���W���[���戵��������
- MIRSATLM PWM����[�^���[�G���R�[�_�RT-�^�X�N���W���[���戵������
- MIRSATLM LCD�f�o�C�X�h���C�o�戵������
- MIRSATLM �ԊO���E�^�b�`�Z���T�f�o�C�X�h���C�o�戵������