| 沼津高専 電子制御工学科 | ||||||
| ||||||
| 改訂記録 | ||||||
|---|---|---|---|---|---|---|
| 版数 | 作成日 | 作成者 | 承認 | 改訂内容 | ||
| A01 | 2001.6.1 | 高橋、鈴木、赤堀 | 関野 | 初版 | ||
| A02 | 2001.7.3 | 高橋、鈴木、赤堀 | 関野 | モードの定義、フローチャートの改訂 | ||
| A03 | 2001.7.5 | 高橋、鈴木、赤堀 | 関野 | メインプログラムの追加 | ||
| B01 | 2002.2.14 | 高橋、鈴木、赤堀 | 関野 | mモード・モジュールの変更 | ||
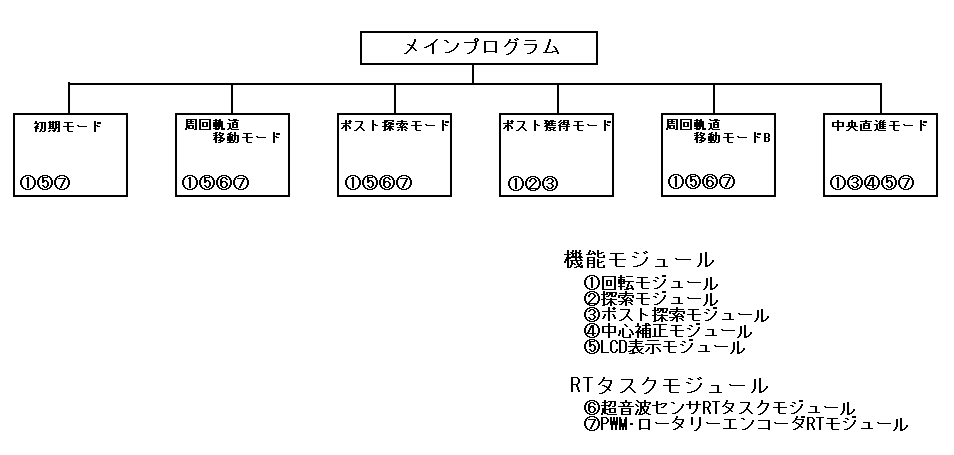
| 機能モジュール | 回転モジュール,LCDモジュール |
|---|---|
| RTタスクモジュール | PWM・ロータリーエンコーダ RTタスクモジュール |
| デバイスドライバ | なし |
| 機能モジュール | 回転モジュール、LCDモジュール |
|---|---|
| RTタスクモジュール | 超音波センサ RTタスクモジュール、PWM・ロータリーエンコーダ RTタスクモジュール |
| デバイスドライバ | タッチセンサドライバ |

| 機能モジュール | 回転モジュール、LCDモジュール |
|---|---|
| RTタスクモジュール | 超音波センサ RTタスクモジュール、PWM・ロータリーエンコーダ RTタスクモジュール |
| デバイスドライバ | タッチセンサドライバ |
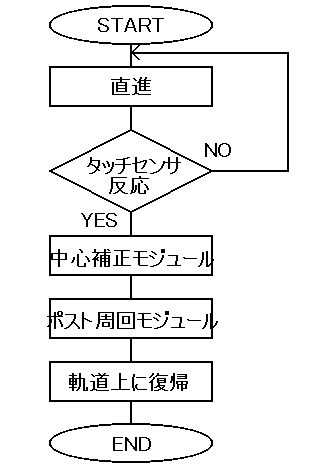
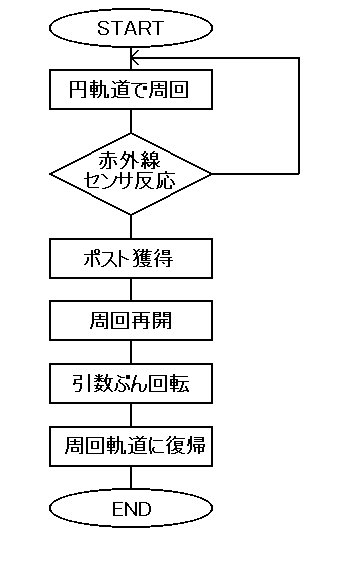
| 機能モジュール | 回転モジュール、中心補正モジュール 、ポスト周回モジュール、LCDモジュール |
|---|---|
| RTタスクモジュール | PWM・ロータリーエンコーダ RTタスクモジュール |
| デバイスドライバ | なし |
| 変数 | 説明 |
|---|---|
| double length | ポスト探索モジュールから渡される"ポストまでの距離" |
| 機能モジュール | 回転モジュール、LCDモジュール |
|---|---|
| RTタスクモジュール | 超音波センサ RTタスクモジュール、PWM・ロータリーエンコーダ RTタスクモジュール |
| デバイスドライバ | タッチセンサドライバ |

| 機能モジュール | 回転モジュール、ポスト探索モジュール、ポスト獲得モード |
|---|---|
| RTタスクモジュール | なし |
| デバイスドライバ | タッチセンサドライバ |
| RTタスクモジュール | PWM・ロータリーエンコーダ RTタスクモジュール |
|---|---|
| デバイスドライバ | なし |
| モード | 周回軌道移動モード、ポスト獲得モード、探索モード |
|---|
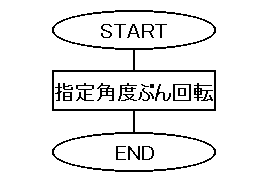
| 変数 | 説明 |
|---|---|
| int angle | mirsの回転角度 |
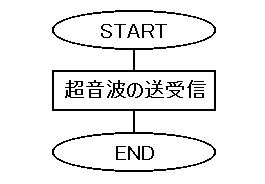
| RTタスクモジュール | 超音波センサ RTタスクモジュール |
|---|---|
| デバイスドライバ | なし |
| モード | 探索モード |
|---|
| RTタスクモジュール | PWM・ロータリーエンコーダ RTタスクモジュール |
|---|---|
| デバイスドライバ | 赤外線センサドライバ、タッチセンサドライバ |
| モード | ポスト獲得モード |
|---|
| 変数 | 説明 |
|---|---|
| int angle | 中心補正量 |
| RTタスクモジュール | PWM・ロータリーエンコーダ RTタスクモジュール |
|---|---|
| デバイスドライバ | タッチセンサドライバ |
| モード | ポスト獲得モード |
|---|
| 変数 | 説明 |
|---|---|
| int r_ang | 中心補正量 |
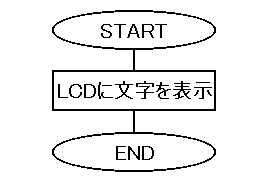
| RTタスクモジュール | なし |
|---|---|
| デバイスドライバ | LCDドライバ |
| モード | 全モード |
|---|
| アドレス |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
R/W |
機能説明 |
| 0140H |
PO |
TS6 |
TS5 |
TS4 |
TS3 |
TS2 |
TS1 |
TS0 |
R |
POはパワーオン信号、TS*はタッチセンサを示す。 |
| 関連文書 |
|---|